|
Flybarless collective rotor head modification I
|
||
|
making the main body
making the cyclic control system
an introduction to electronic components building an airborne video system
|
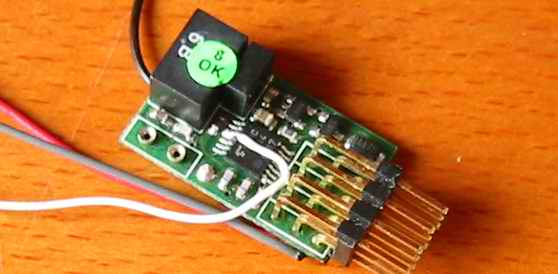
In order to get an additional channel for the pitch control, the receiver ( GWS-R4P ) being used in my helicopter must first be modified. what needed to do is just soldering a signal lead at pin11 of the IC located at the front side. Also, a positive and a negative lead are also needed.
After the modification, what I got is a very light-weight, low-price, 5-channel micro receiver. It is really worth to own one. I place the connector of the new channel next to that of the channel one's:
OK. Let's move on to the rotor head. As I mentioned before, fiberglass circuit board is chosen to construct the rotor head. The idea is to use two precise rectangular holes on two plates to house the ball bearings firmly. By this way, a blade holder is formed which is attached on the horizontal shaft by a set screw ( not by nuts ). It it very important to make sure that the blade holders won't come off during flying. The areas below the set screws are thus lightly filed.
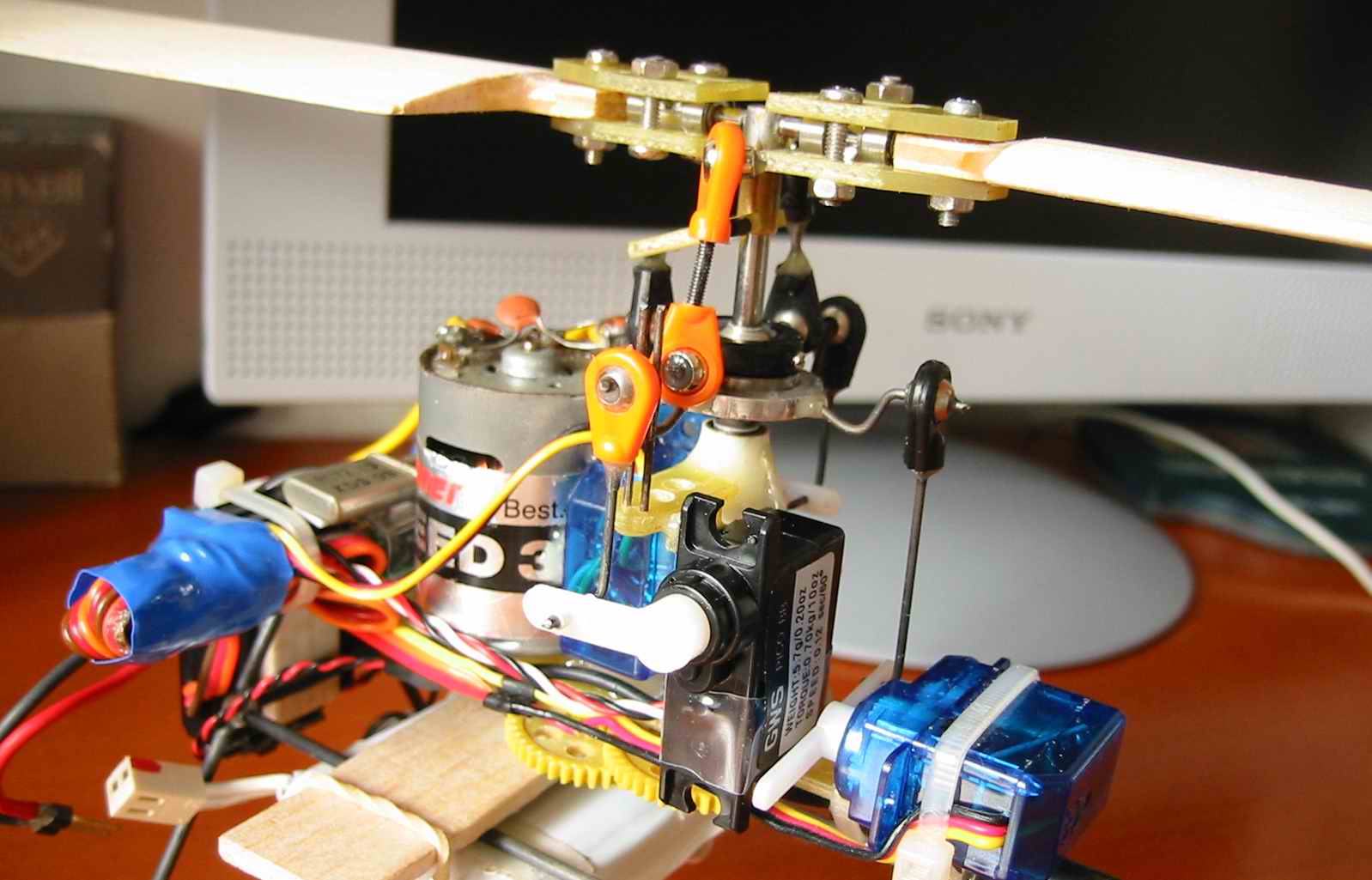
The metal bar inserted in the collar came from a motor shaft which is 2mm in diameter. On each blade holder, a 0.8mm needle is inserted at the lower plate which serves as the skeleton for the metal ball. The pitch control is managed by CCPM in which the output of the elevator, aileron and pitch servo are mixed in various ways to obtain the control response. the pitch of the blades is thus controlled by the swashplate moving up and down. Here is the servo arrangement on my helicopter:
Below is a photo showing how the Pitch servo is attached on my helicopter. One important point is that the servo arms of the three servos must have the same length. If you have visited the page "installing the servo". you would know that there is a supporting fiberglass part behind the main shaft holding tube. It has now acquired one more function (i.e. support the new pitch servo)
Ideally, the three servos used in CCPM mode must be the same model as equal servo speed and deflection range is crucial for proper control functionality. As a matter of weight and size, a GWS pico servo which has almost the same speed and torque is used for the pitch control instead of a Hitec HS-50 that used for aileron and elevator.
Click here to go flybarless modification II
|
|
Copyright © 2002 to 2003 Ben Hui - web master 2003 |
||