
Outra interessante abordagem ao se trabalhar com vetores está em se adotar a sua representação analítica, o que facilita o cálculo das operações vetoriais que veremos mais adiante. Obviamente, essa abordagem não inviabiliza a abordagem gráfica, porém se mostra bem mais eficiente quando estamos trabalhando no espaço vetorial tridimensional. Genericamente, podemos representar analiticamente um vetor do seguinte modo:
| (1.1) |
Onde
![]() ,
,
![]() e
e
 são vetores que representam as projeções do vetor
são vetores que representam as projeções do vetor
![]() sobre os eixos
sobre os eixos
![]() ,
,
![]() e
e
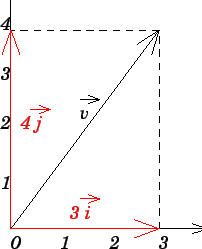
![]() , repectivamente. Vamos entender melhor como isso funciona utilizando um exemplo bidimensional: Consideremos
o vetor apresentado no exemplo 1, um vetor que tem origem em
, repectivamente. Vamos entender melhor como isso funciona utilizando um exemplo bidimensional: Consideremos
o vetor apresentado no exemplo 1, um vetor que tem origem em
![]() e extrmidade em
e extrmidade em
![]() , conforme está mostrado na
Figura 1.2.
, conforme está mostrado na
Figura 1.2.
Na realidade o que fizemos foi substiruir a representação do vetor
![]() por uma soma vetorial cujo resultado
é igual a
por uma soma vetorial cujo resultado
é igual a
![]() . Entenderemos melhor isso mais adiante quando estiver-mos estudando a soma de vetores.
. Entenderemos melhor isso mais adiante quando estiver-mos estudando a soma de vetores.
Como já calculamos anteriormente, esse vetor tem módulo igual a 5 e forma
![]() com o eixo
com o eixo
![]() . Calculando
o módulo da projeção desse vetor sobre o eixo
. Calculando
o módulo da projeção desse vetor sobre o eixo
![]() acharemos o número 3, e prodecendo da mesma forma em relação ao
eixo
acharemos o número 3, e prodecendo da mesma forma em relação ao
eixo
![]() acharemos o número 4. Assim, podemos completamente descrever o vetor do exemplo 1 do seguinte modo:
acharemos o número 4. Assim, podemos completamente descrever o vetor do exemplo 1 do seguinte modo:
| (1.2) |
O caminho inverso também é perfeitamente possível, ou seja, dado um vetor
![]() pode-se calcular o módulo e a direção desse vetor. Nesse caso, o módulo do vetor é calculado como sendo a
raiz quadrada da soma dos quadrados dos módulos das projeções, ou seja:
pode-se calcular o módulo e a direção desse vetor. Nesse caso, o módulo do vetor é calculado como sendo a
raiz quadrada da soma dos quadrados dos módulos das projeções, ou seja:
Os cossenos diretores são calculados da seguinte forma:
Onde
![]() e
e
![]() são respectivamente as projeções do vetor
são respectivamente as projeções do vetor
![]() sobre os eixos
sobre os eixos
![]() e
e
![]() . Note
que a soma dos quadrados dos cossenos diretores sempre é iagual a unidade.
. Note
que a soma dos quadrados dos cossenos diretores sempre é iagual a unidade.
