Até agora, nos exemplos que apresentamos, para cada estrutura existia apenas um deslocamento
em análise e portanto, apenas um único coeficiente de flexibilidade e um único coeficiente
de rigidez, situação que serviu para explicar os conceitos de flexibilidade e de rigidez,
mas que em casos práticos não será aplicada, uma vez que na análise de estruturas usuais o
número de deslocamentos e ações é consideravelmenet elevado. Nestes casos, ao invés de
trabalharmos com coeficientes únicos, iremos utilizar matrizes de coeficientes, matrizes
essas que são nominadas de matriz de rigidez e matriz de flexibilidade.
Os casos que veremos na presente seção ilustram apenas a utilização das matrizes de flexibilidade
e rigidez nas equações que correlacionam ações com deslocamentos, ainda não discutiremos a obtenção
dos coeficientes de flexibilidade e de rigidez.
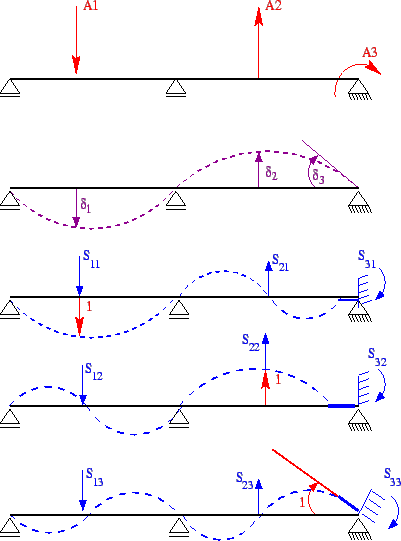
Para ilustrar a obtenção das citadas matrizes, analisemos o caso da viga de dois vãos
sujeita a três ações, conforme apresentado na Figura 15. Digamos que
para esse caso desejemos obter os três deslocamentos ![]() ,
, ![]() e
e ![]() indicados na figura, considerados positivos nos mesmos sentidos das ações aplicadas nos
pontos 1, 2 e 3.
indicados na figura, considerados positivos nos mesmos sentidos das ações aplicadas nos
pontos 1, 2 e 3.
Sabemos que cada deslocamento é composto de parcelas de deslocamento correspondentes
as ações aplicadas na estrutura, de forma que:
 |
(26) |
Sabemos ainda que se for possível aplicar o princípio dos trabalhos virtuais, as
parcelas de deslocamento ![]() podem ser calculados considerando as ações atuando
isoladamente na estrutura. Assim, podemos expressar a parcela de deslocamento
podem ser calculados considerando as ações atuando
isoladamente na estrutura. Assim, podemos expressar a parcela de deslocamento ![]() ,
considerando apenas a ação
,
considerando apenas a ação ![]() . No caso específico apresentado na Figura 15,
podemos expressar
. No caso específico apresentado na Figura 15,
podemos expressar ![]() calculando o deslocamento no ponto 1 considerando
apenas a ação
calculando o deslocamento no ponto 1 considerando
apenas a ação ![]() atuando isoladamente. Assim, se soubermos qual é o deslocamento
que provocado por uma ação unitária no ponto 1 acharemos um coeficiente de flexibilidade
que correlaciona o deslocamento
atuando isoladamente. Assim, se soubermos qual é o deslocamento
que provocado por uma ação unitária no ponto 1 acharemos um coeficiente de flexibilidade
que correlaciona o deslocamento ![]() com a ação
com a ação ![]() dado por:
dado por:
Pelo mesmo raciocínio que nos permitiu escrever a Equação (1.27), podemos escrever que:
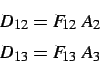
Nas Equações (1.27) e (1.28), os coeficientes ![]() ,
, ![]() e
e ![]() são obtidos através do cálculo do deslocamento no ponto 1 causado pelas ações
são obtidos através do cálculo do deslocamento no ponto 1 causado pelas ações ![]() ,
, ![]() e
e ![]() atuando isoladamente. Para ser mais específico, o coeficiente
atuando isoladamente. Para ser mais específico, o coeficiente ![]() é o deslocamento vertical
no ponto 1 provocado pela ação
é o deslocamento vertical
no ponto 1 provocado pela ação ![]() , ao passo que
, ao passo que ![]() é o deslocamento vertical no mesmo
ponto 1 agora causado pela ação
é o deslocamento vertical no mesmo
ponto 1 agora causado pela ação ![]() , e finalmente
, e finalmente ![]() é o deslocamento vertical no mesmo
ponto 1 causado provocado pela ação
é o deslocamento vertical no mesmo
ponto 1 causado provocado pela ação ![]() . Como já sabemos que o deslocamento provocado
por uma ação unitária é a flexibilidade, obtemos os coeficientes de flexibilidade
. Como já sabemos que o deslocamento provocado
por uma ação unitária é a flexibilidade, obtemos os coeficientes de flexibilidade
![]() onde o índice
onde o índice ![]() indica o ponto onde o deslocamento é considerado, e o índice
indica o ponto onde o deslocamento é considerado, e o índice
![]() indica o ponto onde a ação unitária foi aplicada. Na Figura 15 esse processo
é graficamente apresentado.
indica o ponto onde a ação unitária foi aplicada. Na Figura 15 esse processo
é graficamente apresentado.
Aplicando o mesmo raciocício com o qual obtivemos as Equações (1.27) e (1.28),
podemos escrever que:
De modo análogo, teremos que:
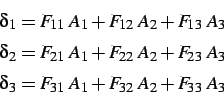
Assim, usando as Equações (1.27), (1.28), (1.29) e (1.30), podemos
correlacionar todos as ações ![]() com os deslocamentos
com os deslocamentos ![]() , do seguinte modo:
, do seguinte modo:
As equações (1.31) podem ser matricialmente expressas na forma da
Equação (1.32).
Em termos genéricos para uma estrutura qualquer, temos que:
Onde:
A Equação (1.33) expressa os deslocamentos em função das ações,
utilizando para isso a matriz de flexibilidade ![]() . Porém, se a partir
da mesma Equação (1.33) quisermos expressar as ações em função
dos deslocamentos, chegaremos a Equação (1.34):
. Porém, se a partir
da mesma Equação (1.33) quisermos expressar as ações em função
dos deslocamentos, chegaremos a Equação (1.34):
Onde ![]() é a matriz de flexibilidade invertida, de forma que para as mesmas
ações e deslocamentos apresentados na Figura 15, podemos dizer que
é a matriz de flexibilidade invertida, de forma que para as mesmas
ações e deslocamentos apresentados na Figura 15, podemos dizer que
![]() , e então escrevermos a Equação (1.35).
, e então escrevermos a Equação (1.35).
Na Equação (1.35) as ações são expressas em função dos deslocamentos e
a matriz ![]() é uma matriz de rigidez para a estrutura apresentada, matriz essa
que pode ser obtida a partir da inversão da matriz
é uma matriz de rigidez para a estrutura apresentada, matriz essa
que pode ser obtida a partir da inversão da matriz ![]() ou diretamente através
da identificação de valores de carregamento que provocam deslocamentos unitários
nas mesmas direções e sentidos indicados pelos deslocamentos
ou diretamente através
da identificação de valores de carregamento que provocam deslocamentos unitários
nas mesmas direções e sentidos indicados pelos deslocamentos ![]() ,
, ![]() e
e ![]() da Figura 15. Tal processo é graficamente ilustrado
na Figura 16.
da Figura 15. Tal processo é graficamente ilustrado
na Figura 16.
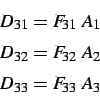
Analisando o processo físico ilustrado na Figura 16 vemos que
o que se procura agora é quais são as ações que provocam deslocamentos
unitários, ou seja, quais os coeficientes de rigidez. Se analisamos o ponto
1 especificamente, e perguntamos quais as ações que provocam um deslocamento
unitário na mesma direção e sentido de ![]() , fazendo com que
, fazendo com que ![]() e
e ![]() sejam nulos, obteremos os coeficientes
sejam nulos, obteremos os coeficientes ![]() ,
, ![]() e
e ![]() ,
e assim suscessivamente, até obtermos a matriz de rigidez
,
e assim suscessivamente, até obtermos a matriz de rigidez ![]() , em raciocío
semelhante ao desenvolvido na obtenção dos coeficientes de flexibilidade
da matriz
, em raciocío
semelhante ao desenvolvido na obtenção dos coeficientes de flexibilidade
da matriz ![]() . Os deslocamentos
. Os deslocamentos ![]() e
e ![]() são nulos no caso desses
três coeficientes, por que a pergunta que tentamos responder é quais são as ações
que provocam deslocamento unitário apenas no ponto 1. Quando repetirmos a mesma
investigação para os pontos 2 e 3, acharemos os demais coeficientes de rigidez
que compõe a matriz de rigidez.
são nulos no caso desses
três coeficientes, por que a pergunta que tentamos responder é quais são as ações
que provocam deslocamento unitário apenas no ponto 1. Quando repetirmos a mesma
investigação para os pontos 2 e 3, acharemos os demais coeficientes de rigidez
que compõe a matriz de rigidez.
Determinar os valores dos coeficientes de rigidez e flexibilidade de uma
estrutura genérica é uma tarefa muito difícil. O que usualmente se faz é
determinar esses coeficientes para certos tipos de estruturas de forma
específica e isolada, construindo-se assim uma tabela de valores desses
coeficientes para situações previamente determinadas. De posse desses valores
previamente conhecidos, divide-se a astrutura global de forma que os coeficientes
de flexibilidade e de rigidez da estrutura global possam ser obtidos a partir
das combinações dos coeficientes conhecidos à priori.



![\begin{displaymath}
\left[
\begin{array}{c}
\delta_1\\
\delta_2\\
\delta_3\\
...
...eft[
\begin{array}{c}
A_1\\
A_2\\
A_3\\
\end{array}\right]
\end{displaymath}](img106.png)