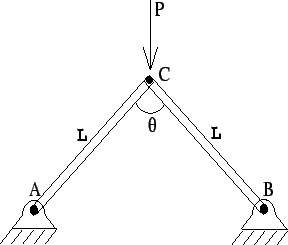
De modo bastante simplificado podemos dizer que os mecanismos são estruturas que não se sustentam por si próprias, e quando submetidos a forças se movimentam. O movimento se dá porque os vínculos não são suficientes para restringir o movimento. Do ponto de vista matemático, os mecanismos constituem sistemas onde o número de reações de apoio é menor que o número de equações de equilíbrio disponíveis para resolver o sistema de equações de equilíbrio.
A Figura 9.2 apresenta um exemplo de mecanismo. São várias barras articuladas através de pinos que permitem o giro e que
que estão igualmente apoiadas sobre dois pinos que também permitem o giro. A ``intuição mecânica'' 9.1 nos
indica que essa estrutura ``irá cair'' devido as forças que atuam sobre a mesma, e que as reações de apoio nada podem fazer para
impedir isso.
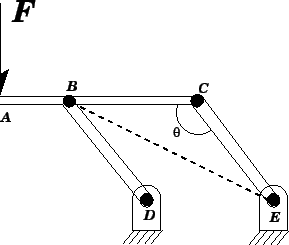
Digamos então que coloquemos um cabo ligando os pinos B e E, de modo a equilibrar o sistema, conforme mostrado na
Figura 9.3
Considerando que todas as barras tenham o mesmo comprimento, o problema consiste então em determinar qual o valor da tração
no cabo BE em função da força
![]() aplicada no ponto A. Esse é um dos exemplos clássicos de aplicação do método dos
trabalhos virtuais na solução de probelmas envolvendo o equilíbrio de mecanismos.
aplicada no ponto A. Esse é um dos exemplos clássicos de aplicação do método dos
trabalhos virtuais na solução de probelmas envolvendo o equilíbrio de mecanismos.
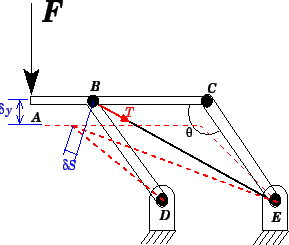
A Figura 9.4 mostra um deslocamento virtual aplicado no mecanismo ABCDE, de modo a surgirem dois deslocamentos virtuais
![]() e
e
![]() nos pontos onde estão respectivamente aplicadas as forças
nos pontos onde estão respectivamente aplicadas as forças
![]() e a tração
e a tração
 . Como somente
estas forças estão aplicadas sobre pontos que se deslocam, somente elas provocarão o trabalho virtual. Como o deslocamento
. Como somente
estas forças estão aplicadas sobre pontos que se deslocam, somente elas provocarão o trabalho virtual. Como o deslocamento
![]() tem o mesmo sentido da força
tem o mesmo sentido da força
![]() o trabalho de
o trabalho de
![]() será positivo, ao passo que o deslocamento
será positivo, ao passo que o deslocamento
![]() tem sentido
contrário ao da tração
, por isso o trabalho de
será negativo. Escrevendo a equação do trabalho virtual total, teremos
que:
tem sentido
contrário ao da tração
, por isso o trabalho de
será negativo. Escrevendo a equação do trabalho virtual total, teremos
que:
Portanto, podemos escrever que:
O problema agora consiste em achar uma relação entre
![]() e
e
![]() , e isso pode ser feito a partir das seguintes observações
da geometria do sistema.
, e isso pode ser feito a partir das seguintes observações
da geometria do sistema.
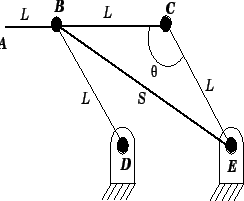
Analisando a Figura 9.5, e fazendo BE=S podemos escrever que:
Portanto,
Do mesmo modo, podemos uma expressão para
![]() em função de
em função de
![]() :
:
Voltando para a expressão original do trabalho virtual total pode-se escrever que: