
A viga da Figura 23 representa um caso simples de apenas um grau de
indeterminação cinemática, didaticamente válido para ilustrar o método da rigidez, entretanto
ao se analisar uma estrutura mais complexa, com um número maior de indeterminações
cinemáticas é necessário um procedimento mais sistematizado e facilmente generalizável.
Para ilustrar esse procedimento mais sistematizado analisaremos o caso apresentado na
Figura 24.
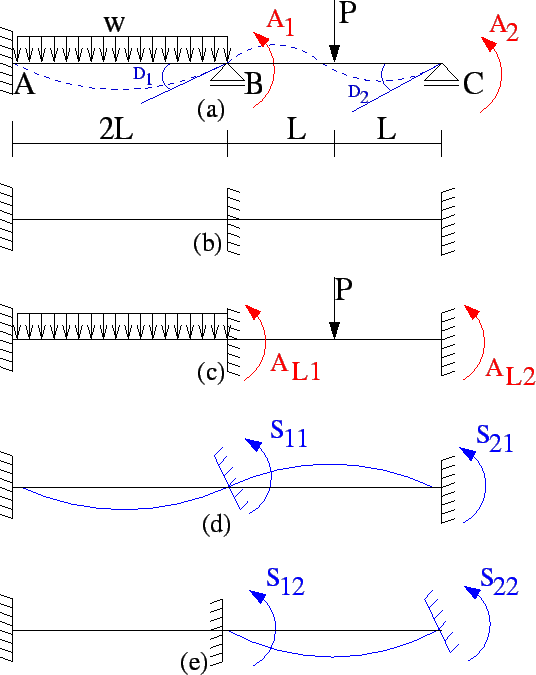
O primeiro passo da análise da viga apresentada na Figura 24(a) é
o cálculo do grau de indeterminação cinemática e a identificação dos deslocamentos
incógnitos. Desconsiderando os deslocamentos axiais, a viga da Figura 24(a)
pode ter até 6 deslocamento nodais (translação vertical e rotação dos nós A, B e C). Desses
seis deslocamentos possíveis, 4 são conhecidos (dois do nó A, um do nó B e um do nó C), desse
modo, a estrutura é cinematicamente indeterminada do segundo grau e os deslocamentos desconhecidos
são as rotações dos nós B e C, que nominaremos respectivamente de ![]() e
e ![]() , conforme
o indicado na Figura 24(a).
, conforme
o indicado na Figura 24(a).
O segundo passo da análise é obter a estrutura restringida, colocando engastes nos pontos
onde a estrutura apresenta os deslocamentos incógnitos ![]() e
e ![]() , ou seja, nos pontos
B e C. Desse modo obtém-se a estrutura restringida apresentada na Figura 24(b).
, ou seja, nos pontos
B e C. Desse modo obtém-se a estrutura restringida apresentada na Figura 24(b).
Em seguida da detreminação da estrutura restringida, calcula-se as ações de extrmidade na
estrutura restringida devidas ao carregamento real, para tanto, utilizam-se os valores
pré-tabelados do anexo 1, casos 1 e 4. ![]() Essas ações
de extremidade estão graficamente indicadas na Figura 24(b) e serão
nomidadas por
Essas ações
de extremidade estão graficamente indicadas na Figura 24(b) e serão
nomidadas por ![]() e
e ![]() .
.
Utilizando os valores tabelados no Anexo 1, e lembrando que para o nó B contribuem
2 barras ao mesmo tempo (barra AB e barra BC), teremos que:
Agora que já sabemos os valores das ações de extremidade devidas aos carregamentos reais,
devemos calcular os valores dessas mesmas ações de extremidade agora devidas a ação dos
deslocamentos incógnitos. Para que a solução fique mais genérica e mais matricialmente
tratável calcularemos primeiramente os valores das ações de extrmidade devido a
deslocamentos unitários nos memsmo pontos e sentidos dos deslocamentos ![]() e
e ![]() ,
de modo que as ações de extremidade devida aos deslocamentos serão expressas na forma
,
de modo que as ações de extremidade devida aos deslocamentos serão expressas na forma ![]() .
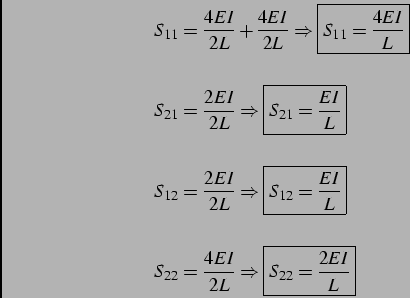
Utilizando a segunda tabela do anexo 1 e lembrando que concorrem duas barras no
ponto B (barras AB e BC), teremos:
.
Utilizando a segunda tabela do anexo 1 e lembrando que concorrem duas barras no
ponto B (barras AB e BC), teremos:
Agora que já obtivemos os valores das ações de extremidade devido a deslocamentos unitários podemos
expressar essas mesmas ações em função dos deslocamentos incónitos na forma matricial ![]() , e
logo em seguida escrevermos a equação de equilíbrio, também conhecida como equeção de superposição
para os nós B e C, da seguinte forma:
, e
logo em seguida escrevermos a equação de equilíbrio, também conhecida como equeção de superposição
para os nós B e C, da seguinte forma:
Onde:
Também costuma-se nominar ![]() ,
, ![]() e
e ![]() por vetores.
por vetores.
Para o caso da viga da Figura 24(b) a Equação (2.26) é expressa como:
Substituindo os valores já obtidos nas Equações (2.24) e (2.25) na Equação (2.27),
teremos:
Isolando a matriz do termos independentes (![]() ) da Equação (2.28), teremos que:
) da Equação (2.28), teremos que:
Neste ponto da análise chega-se a um sistema de equações onde a matriz (ou vetor) ![]() é
o vetor das incógnitas a serem determinadas. Reescrevendo a Equação (2.29)
de outra forma, fica mais fácil visualizar a expressão matricial de um sistema de equações,
conforme mostrado na Equação (2.30):
é
o vetor das incógnitas a serem determinadas. Reescrevendo a Equação (2.29)
de outra forma, fica mais fácil visualizar a expressão matricial de um sistema de equações,
conforme mostrado na Equação (2.30):
Existem várias formas de se resolver a Equação (2.30), que em termos práticos
resolvida numericamente, através de um método numérico específico para a solução de sistemas
de euqações lineares. No caso específico do método da rigidez, onde a matriz de rigidez ![]() é sempre uma matriz quadrada e simétrica, a decomposição de Cholesky
é um método numericamente veloz e eficiente.
é sempre uma matriz quadrada e simétrica, a decomposição de Cholesky
é um método numericamente veloz e eficiente.
Em capítulos posteriores aprofundaremos os estudos em alguns métodos numéricos necessários
para a montagem e a solução de sistemas de equações como os da Equação (2.30).
Por ora, continuemos a solução imaginando que ela será realizada sem a ajuda de um computador
digital. Para isso será necessário obter a inversa da matriz de rigidez ![]() . Uma das
formas de se inverter uma matriz quadrada é apresentada por boldrini, e
seguindo esta metodologia obteremos a inversa da matriz de rigidez apresentada na Equação
(2.30) como sendo a matriz
. Uma das
formas de se inverter uma matriz quadrada é apresentada por boldrini, e
seguindo esta metodologia obteremos a inversa da matriz de rigidez apresentada na Equação
(2.30) como sendo a matriz ![]() (2.31):
(2.31):
Uma vez que se tem a inversa da matriz de rigidez ![]() , pode-se resolver a
Equação (2.30), chegando-se a expressão da Equação (2.32):
, pode-se resolver a
Equação (2.30), chegando-se a expressão da Equação (2.32):
O vetor ![]() da Equação (2.32) contém os deslocamentos que solucionam
o problema, expressos por:
da Equação (2.32) contém os deslocamentos que solucionam
o problema, expressos por:
Agora que os deslocamentos foram encontrados, é possível calcular as reações de apoio
e esforços internos nas extremidades dos membros. Existem basicamente dois caminhos
para se proceder os cálculos restantes: um deles visa a otimização para solução
via método numérico e computador digital, outra possibilita a solução analítica do
problema.
Em termos práticos, é óbvio que para os problemas mais complexos adota-se a solução
via computador digital, e nos próximos capítulos veremos essa abordagem de maneira
mais aprofundada. Entretanto, antes de adentrar-mos na seara da programação em
computadores digitais é necessário compreender a mecânica dos processos de cálculo
do método da rigidez, visto que essa compreenção é essencial para que futuramente
possamos realmente entender o uso dos algoritimos de programação na solução
computacional das análises matriciais de estruturas reticuladas.
Na solução via método da rigidez, primeiramente são calculados os deslocamentos,
e a partir destes pode-se achar as reações de apoio e esforços internos nas barras,
conforme vimos de maneira genérica na Seção 2.3. Agora, que já sasbemos
os valores dos deslocamentos, podemos calcular as reações de apoio conforme o
especificado na Equação (2.34):
Onde:
Os valores de ![]() e
e ![]() são obtidos usando as mesmas tabelas do anexo 1.
são obtidos usando as mesmas tabelas do anexo 1.
De modo análogo ao da Equação (2.34), podemos calcular as ações de extrmidade dos membros
na forma expressa pela Equação (2.35):
Onde:
Os valores de ![]() e
e ![]() também são obtidos usando as mesmas tabelas do anexo 1.
também são obtidos usando as mesmas tabelas do anexo 1.
Calculemos as reações de apoio para o exemplo da viga da Figura 24, utilizando
a Equação (2.34). O esquema estrutural da Figura 25 indica como
obter cada uma das parcelas da Equação (2.34)
Observando a Figura 25, e lembrando que no ponto B concorrem
duas barras (AB e BC), podemos utilizar as tabelas do Anexo 1 e determinar os componentes
dos vetores ![]() e
e ![]() do seguinte modo:
do seguinte modo:
Substituindo os valores da Equação (2.36) na Equação (2.34), teremos que:
Para fins ilustrativos suponhamos que a viga da Figura 24(a), seja feita de
uma material cujo módulo de elasticidade é igual a
![]() , (concreto armado
, (concreto armado ![]() =25MPa)
tenha uma seção transversal com
=25MPa)
tenha uma seção transversal com
![]() (aproximadamente uma seção retangular
20x50cm), que L seja igual a 1 metro, que
(aproximadamente uma seção retangular
20x50cm), que L seja igual a 1 metro, que
![]() e que
e que
![]() ,
podemos obter os valores numéricos da Equação (2.33), de modo que:
,
podemos obter os valores numéricos da Equação (2.33), de modo que:
![\begin{displaymath}
\left[
\begin{array}{c}
D_1 \\
D_2 \\
\end{array}\right]
=...
...\times 10^{-5}\\
-7,3696 \times 10^{-5}\\
\end{array}\right]
\end{displaymath}](img212.png)
Perceba que ![]() é negativo, isso implica que o deslocamento real no apoio C se dá
no sentido horário, o que é razoável de se esperar uma vez que o vão que contém as
cargas distribuídas possui peso suficiente para "levantarbegintex2html_wrap_inline$$ o vão que possui
apenas a carga concentrada. Portanto, de acordo com os deslocamentos encontrados,
a linha deslocada arbitrada para a viga apresentada na Figura 24(a)
deve ser corrigida para a linha deslocada da viga apresentada na Figura 26
é negativo, isso implica que o deslocamento real no apoio C se dá
no sentido horário, o que é razoável de se esperar uma vez que o vão que contém as
cargas distribuídas possui peso suficiente para "levantarbegintex2html_wrap_inline$$ o vão que possui
apenas a carga concentrada. Portanto, de acordo com os deslocamentos encontrados,
a linha deslocada arbitrada para a viga apresentada na Figura 24(a)
deve ser corrigida para a linha deslocada da viga apresentada na Figura 26
Perceba ainda que em módulo, uma vez que o sinal serve apenas para indicar o sentido
do giro, ![]() . O que siginifica que as maiores "flexasbegintex2html_wrap_inline$$ ocorrerão no vão
menos carregado (BC).
. O que siginifica que as maiores "flexasbegintex2html_wrap_inline$$ ocorrerão no vão
menos carregado (BC).


![\begin{displaymath}
\left[
\begin{array}{c}
A_1 \\
A_2 \\
\end{array}\right]
=...
...\cdot
\left[
\begin{array}{c}
D_1\\
D_2\\
\end{array}\right]
\end{displaymath}](img186.png)
![\begin{displaymath}
\left[
\begin{array}{c}
0 \\
0 \\
\end{array}\right]
=
\le...
...\cdot
\left[
\begin{array}{c}
D_1\\
D_2\\
\end{array}\right]
\end{displaymath}](img187.png)
![\begin{displaymath}
\left[
\begin{array}{c}
\left( \frac{wL^2}{3} - \frac{PL}{4...
...\cdot
\left[
\begin{array}{c}
D_1\\
D_2\\
\end{array}\right]
\end{displaymath}](img188.png)
![\begin{displaymath}
\frac{EI}{L}
\left[
\begin{array}{cc}
4 & 1 \\
1 & 2 \\
\e...
...frac{PL}{4} \right) \\
- \frac{PL}{4} \\
\end{array}\right]
\end{displaymath}](img190.png)
![\begin{displaymath}[S]^{-1} = \frac{L}{7EI}
\left[
\begin{array}{rr}
2 & -1 \\
-1 & 4 \\
\end{array}\right]
\end{displaymath}](img192.png)
![\begin{displaymath}
\left[
\begin{array}{c}
D_1 \\
D_2 \\
\end{array}\right]
...
...frac{PL}{4} \right) \\
- \frac{PL}{4} \\
\end{array}\right]
\end{displaymath}](img194.png)
![\begin{displaymath}
\left[
\begin{array}{c}
D_1 \\
D_2 \\
\end{array}\right]
...
... \frac{wL^2}{3} - \frac{3PL}{4} \right) \\
\end{array}\right]
\end{displaymath}](img195.png)


![\begin{displaymath}
\left[
\begin{array}{c}
A_{R1}\\
A_{R2}\\
A_{R3}\\
A_{R4}...
...\cdot
\left[
\begin{array}{c}
D_1\\
D_2\\
\end{array}\right]
\end{displaymath}](img206.png)
