
Cette partie parle d'un document de la NASA traitant du guidage et de la navigation du module lunaire.
Lien vers ce document
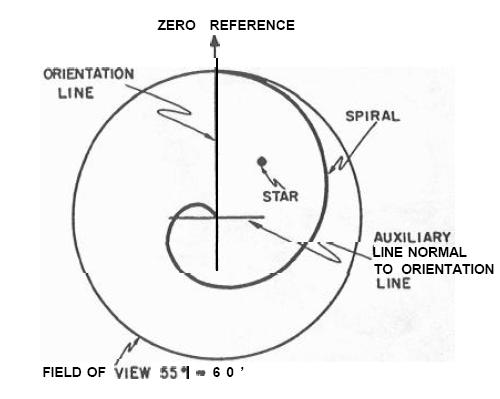
Pour faire l'alignement de l'IMU (plateforme inertielle de guidage avec les gyroscopes), ils utilisaient un tķlescope d'alignement optique.
Ils disent que, diffķremment du tķlescope optique du module de commande, le tķlescope optique du module lunaire n'ķtait pas articulķ, mais avait un large champ de vision; il pouvait Ļtre positionnķ dans trois positions distinctes de vue, mais pas d'autre position (contrairement Ó celui du CSM qui pouvait Ļtre orientķ dans n'importe quelle direction).

Si l'astronaute pouvait voir une ķtoile dans l'une des positions sķlectionnables, il faisait deux mesures:
1) Il faisait d'abord tourner le rķticule jusqu'Ó ce que sa longue barre vienne en superposition avec l'ķtoile utilisķe pour l'alignement, et enregistrait l'angle correspondant.

2) Il tournait ensuite le rķticule jusqu'Ó ce que la spirale du rķticule vienne couper l'ķtoile utilisķe pour l'alignement, et enregistrait l'angle correspondant Ó nouveau.

Ces deux angles permettaient effectivement de localiser l'ķtoile relativement au centre du tķlescope.
Mais cette mesure n'ķtait pas prķcise pour deux raisons:
1) Le large angle de vue rendait d'abord cet alignement imprķcis, car il est prķfķrable de faire l'alignement avec un petit angle de vue qu'avec un large.
2) La mesure avec la spirale est assez imprķcise.

En fait, l'alignement aurait ķtķ bien plus prķcis si le tķlescope avait ķtķ articulķ comme celui du module de commande, et que l'astronaute avait simplement orientķ le tķlescope de maniĶre Ó ce que l'ķtoile choisie vienne en superposition avec le centre du rķticule.

Dans la description de la navigation orbitale, ils disent ceci:
"le SCT est utilisķ pour des mesures de vision de points lunaires cartographiķs, des visionnages de l'horizon, et des mesures de pķriode orbitale en chronomķtrant, soit le passage au-dessus d'un point identifiable, soit deux occultations successives d'une ķtoile par l'horizon lunaire."

Vu l'emplacement du tķlescope Ó l'avant du module de commande, une ķtoile peut Ļtre vue apparaissant au-dessus de l'horizon, mais jamais occultķe par l'horizon lunaire; elle disparaŅtra seulement Ó cause de la limite de visibilitķ Ó l'avant du module de commande.
Ce ne devrait donc pas Ļtre deux occultations successives d'une ķtoile par l'horizon lunaire, mais deux apparitions successives d'une ķtoile au-dessus de l'horizon lunaire.

Ceci est le schķma le l'orbite de descente d'Hohmann du module lunaire.
Le module lunaire commence par dķcroŅtre sa vitesse orbitale, ce qui le place sur une orbite elliptique qui l'amĶnera sur une orbite plus basse Ó l'extrķmitķ opposķe de l'ellipse, depuis laquelle il commencera la descente motorisķe.

Une lķgende indique que la descente du module lunaire est contr¶lķe depuis le module de commande.
Mais il n'y a rien Ó contr¶ler!
Le module de commande ne peut pas agir sur la trajectoire du module de commande une fois qu'il est placķ sur l'orbite de transfert, car le module lunaire suit simplement cette orbite sans prendre aucune action avant d'atteindre l'orbite plus basse.

Une phase de la descente motorisķe, qui suit la phase la plus longue, celle de freinage, est "la phase d'attitude constante".
Cette phase est une phase dans laquelle l'attitude du module lunaire est gardķe constante, de maniĶre Ó permettre Ó l'astronaute de vķrifier visuellement le site d'alunissage.

Mais le module lunaire n'a pas Ó garder une attitude constante Ó quelque moment que ce soit; l'attitude du module lunaire est uniquement dķterminķe par les forces courantes le long des deux axes qui doivent Ļtre appliquķes pour contr¶ler les vitesses horizontale et verticale.
L'attitude du module lunaire permet de rķpartir la poussķe du rķacteur sur les deux axes.
Si c'est la vitesse horizontale qui doit le plus Ļtre contr¶lķe, ce qui est le cas au dķbut de la descente motorisķe, le module lunaire doit Ļtre plus horizontal que vertical, et, si c'est inversement la vitesse verticale qui doit le plus Ļtre contr¶lķe, ce qui est le cas Ó la fin de la descente motorisķe, le module lunaire doit Ļtre plus vertical qu'horizontal.
Aucune autre considķration ne doit entrer en ligne de compte pour dķterminer l'attitude du module lunaire.
Si l'astronaute a besoin de voir la zone d'alunissage, il devrait Ļtre ķquipķ d'un systĶme optique qui lui permette de voir le sol lunaire mĻme quand le module lunaire est vertical.

Dans la prķtendue "phase d'attitude constante", le module lunaire a dķjÓ rķduit la plus grande partie de sa vitesse horizontale, et la force centrifuge ne permet plus de contrer l'attraction lunaire.
Le module lunaire devrait Ļtre davantage vertical que ce qui est montrķ, de maniĶre Ó contrer l'attraction lunaire avant qu'elle ne fasse prendre trop de vitesse verticale au module lunaire.

Ce qui est encore plus absurde est qu'ils disent que cette phase est contr¶lķe avec un rķglage rķduit de la poussķe du moteur pour allonger le temps de maneuvre Ó deux minutes Ó peu prĶs.
Mais, s'ils rķduisent la poussķe du moteur de descente, avec une attitude qui fait que la force verticale qui contre l'attraction lunaire est plus petite que si le module ķtait vertical, l'attraction lunaire va Ļtre insuffisamment contrķe; le module lunaire va prendre de la vitesse, et il s'ķcrasera sur le sol lunaire avant la fin de la phase d'attitude constante.
L'astronaute aura alors tout le loisir de "visualiser" le sol lunaire!

Ceci est le graphe de la premiĶre phase de la trajectoire d'alunissage.

Entre les temps 300 et 332, le module lunaire perd environ 6000 pieds, ce qui fait 1800m.
Cela fait une vitesse verticale de 56m/s, ce qui fait 200 en km/h.
Cette vitesse verticale devra Ļtre annulķe avant que le module touche le sol.
Ceci rend la phase d'attitude constante, dans laquelle le module dķcroŅt la poussķe du moteur et n'a pas une attitude verticale, encore plus absurde.

Ceci est le graphe de la seconde phase de la trajectoire d'alunissage.

Alors que la premiĶre phase de la trajectoire d'alunissage ķtait nettement courbķe, la seconde phase de la trajectoire d'alunissage est rectiligne.
En fait, la seconde phase de la trajectoire d'alunissage devrait aussi Ļtre courbķe, elle n'a pas de raison d'Ļtre rectiligne, ce n'est pas physique.

Ceci est le graphe de la poussķe du rķacteur en fonction du temps.
Ce graphe est complķtement irrķaliste; la poussķe apparaŅt Ļtre discontinue, alors qu'elle devrait Ļtre continue.

Et ceci est le graphe d'angle de la poussķe en fonction du temps.
Une fois de plus, elle apparaŅt irrķaliste et non physique en raison d'une brutale discontinuitķ.

Ce schķma montre comment le contr¶le inertiel de la descente et phase d'alunissage initiale ķtait effectuķ.

L'IMU envoie de l'information au CDU (flĶche bleue), lequel la convertit en impulsions qu'il envoie au LGC (flĶche verte).
Mais il n'y a pas de liaison directe entre l'IMU et le LGC, car le LGC ne peut pas directement utiliser l'information envoyķe par l'IMU.
La liaison orange entre l'IMU et le LGC est donc incorrecte et n'a pas de raison d'exister!
Le LGC utilise l'information reńue depuis l'IMU (par l'intermķdiaire du CDU) pour mettre Ó jour les donnķes de navigation et calculer de nouvelles commandes pour la poussķe du moteur et l'attitude (l'attitude est contr¶lķe par les rķacteurs latķraux).
A partir de ce qu'il a calculķ, il envoie des commandes au moteur de descente (liaison jaune) pour contr¶ler sa poussķe, et une commande au RCS (liaison violette) pour contr¶ler l'attitude du module.
Mais le CDU n'a pas Ó envoyer une commande directe au SCS pour corriger l'erreur d'attitude, car c'est au LGC de corriger les erreurs d'attitude, et non au CDU, dont l'unique fonction est de transmettre au LGC les informations courantes de l'IMU.
La liaison rouge entre le CDU et le SCS est donc incorrecte, et n'a pas de raison d'exister!

Cette figure est supposķe expliquer le concept de rķticule fixe pour la maneuvre terminale d'alunissage.
Selon cette figure, l'astronaute serait capable de voir Ó travers la structure du module lunaire; il doit avoir une vision kryptonique comme Superman!
Et, sur cette figure, le module lunaire n'a pas vraiment l'attitude idķale pour permettre Ó l'astronaute de visualiser le sol lunaire!

Cette figure explique comment le point de dķcollage est dķterminķ.
Mais l'orbite qu'ils montrent pour que le module lunaire puisse joindre le module de commande est incorrecte, parce qu'elle croise l'orbite du module de commande, pour redescendre ensuite vers cette orbite.
C'est une orbite inutilement compliquķe, qui rend le rendez-vous encore plus difficile.

En fait, l'orbite de transfert que le module lunaire doit suivre pour joindre l'orbite du module de commande aurait du ressembler Ó ceci.
Le module lunaire devrait rejoindre l'orbite du module de commande par l'intķrieur, et non par l'extķrieur.

Ceci est le graphe de la trajectoire de montķe motorisķe.

Normalement, le module lunaire devrait gagner de l'altitude jusqu'Ó la fin de la montķe motorisķe (Ó la conclusion de laquelle il est sur une trajectoire orbitale), Ó un taux graduellement plus petit.
Mais, sur ce graphe, il arrĻte de gagner de l'altitude avant la fin de la montķe motorisķe, et commence mĻme de perdre lķgĶrement de l'altitude avant la fin de la montķe motorisķe.

Ceci est le graphe de l'angle de la poussķe dans la montķe motorisķe, et une fois de plus ce graphe paraŅt irrķaliste, non physique, Ó cause d'une brutale discontinuitķ.

Ce schķma montre comment le calcul du rendez-vous est contr¶lķ.

Le radar envoie de l'information du RADAR CDU qui la convertit en impulsions pour le LGC (liaisons vertes).
Le LGC envoie de l'information au RADAR CDU pour commander l'orientation de l'antenne, lequel la convertit en commandes pour les servomoteurs de l'antenne (liaisons bleues).
Mais il n'y a pas de liaison directe entre le radar et le LGC, et donc la liaison rouge n'a pas de raison d'exister!

Ce graphe montre les projections sur le plan XY de ce qui serait la trajectoire du module lunaire si elle n'ķtait pas corrigķe, et la trajectoire rķelle corrigķe du module lunaire; il montre que la trajectoire non corrigķe passe aussi prĶs du point idķal d'approche que la trajectoire corrigķe.

De mĻme, ce graphe montre les projections sur le plan XZ de ce qui serait la trajectoire du module lunaire si elle n'ķtait pas corrigķe, et la trajectoire rķelle corrigķe du module lunaire; une fois de plus, il montre que la trajectoire non corrigķe passe aussi prĶs du point idķal d'approche que la trajectoire corrigķe.
Donc, comme la trajectoire non corrigķe ne fait pas pire que la trajectoire corrigķe sur les projections de deux plans diffķrents, cela signifie que, spatialement aussi, elle ne fait pas pire que la trajectoire corrigķe.
Dans ces conditions, on peut se demander pourquoi le module lunaire s'est embĻtķ Ó faire des corrections dans la trajectoire, puisque 'il n'aurait pas fait pire sans ces corrections!

Ce schķma explique la phase terminale de rendez-vous.

A partir de la distance du module lunaire au module de commande, qu'il mesure avec le radar, le module lunaire calcule le temps qu'il lui faudrait pour gagner le module de commande s'il y allait tout droit avec une vitesse dķsirķe; ce temps est appelķ Tgo.
La trajectoire que le module lunaire suit couramment le ferait arriver sur l'orbite du module de commande en un temps TA; le module lunaire calcule une nouvelle trajectoire qui le ferait arriver sur l'orbite du module de commande en un temps TA'=TA+Tgo.
Et il commence de suivre cette nouvelle trajectoire.
Le module rķpĶte ce processus, pas Ó pas, jusqu'Ó avoir atteint l'orbite du module de commande.
Comme le module lunaire est plus proche de la lune, il a une vitesse angulaire lķgĶrement plus grande que celle du module de commande, et reste donc devant celui-ci.

Le module lunaire est donc en train de suivre sa nouvelle trajectoire.
Il calcule de nouveau le temps Tgo qu'il lui faudrait pour atteindre le module de commande s'il y allait tout droit avec une vitesse dķsirķe.
Il calcule une nouvelle trajectoire qui est telle qu'elle le fera atteindre l'orbite du module de commande en un temps ķgal au temps de la trajectoire courante plus Tgo, et commence de la suivre.

Le module lunaire suit maintenant la nouvelle trajectoire calculķe.
Il calcule de nouveau le temps Tgo qu'il lui faudrait pour atteindre le module de commande s'il y allait tout droit avec une vitesse dķsirķe.
Il calcule une nouvelle trajectoire qui est telle qu'elle le fera atteindre l'orbite du module de commande en un temps ķgal au temps de la trajectoire courante plus Tgo, et commence de la suivre.
Et ainsi de suite...

Avec ce processus, il va falloir un "certain temps" au module lunaire pour gagner l'orbite du module de commande!

C'est ce qu'on doit appeler une "trajectoire optimisķe".
LOL!

