Information redondante dans Apollo 8

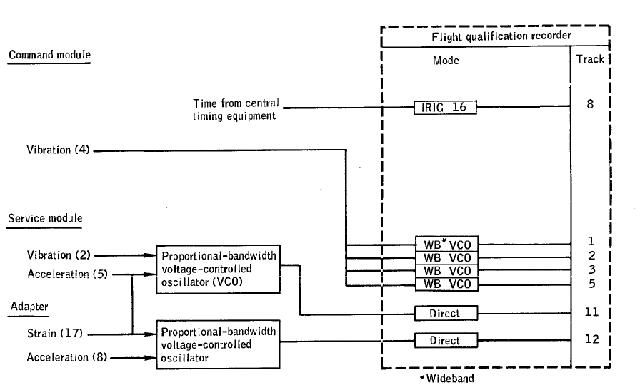
 Dans Apollo 8, le systčme d'instrumentation, dont ils montrent le schéma ici, avait la tâche d'enregistrer diverses informations, mais est-ce que ces informations étaient vraiment utiles? |
 Nous voyons d'abord qu'il y a trois informations différentes de timing. En fait une seule est vraiment nécessaire... |
 ...Et les deux autres sont redondantes et peuvent ętre supprimées. |
 Cela fait autant d'informations inutiles qui n'ont pas besoin d'ętre enregistrées. |
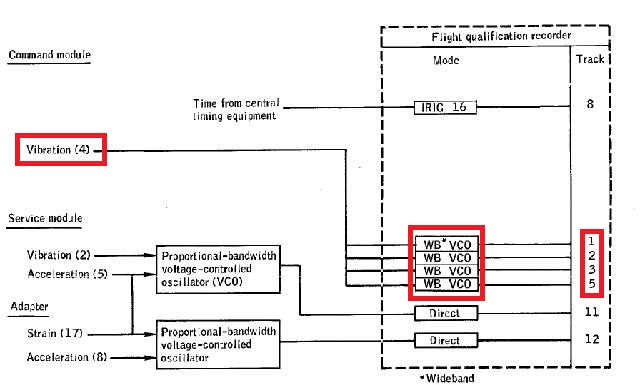 Nous voyons ensuite que la vibration est enregistrée quatre fois, modulant quatre VCO différents; męme si les VCO sont accordés sur des fréquences différentes, ils transportent la męme information, et ils sont donc redondants. Une seule a besoin d'ętre enregistrée. |
 Nous gardons donc seulement un seul enregistrement de la vibration, et supprimons les autres. |
 Puis nous voyons un bloc sur lequel nous voyons que la vibration est rentrée, alors qu'elle est déjŕ enregistrée au-dessus, et l'accélération est rentrée, alors qu'elle est rentrée dans le bloc du dessous. Et, si vous pensez que ce n'est pas la męme accélération, bien sűr que c'est la męme accélération, car tous les points du module de commande se déplacent de la męme maničre, et ont donc la męme accélération. De męme pour la vibration. |
 Ce bloc contient donc de l'information redondante, et peut donc ętre supprimé. |
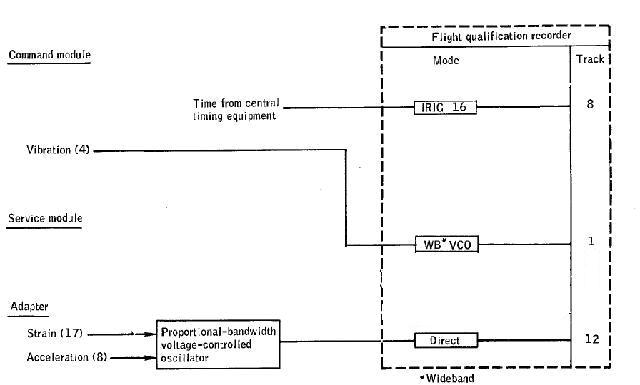 Aprčs avoir supprimé l'information redondante qui n'a pas besoin d"ętre enregistrée, nous obtenons alors le schéma final du systčme d'instrumentation, dans lequel seule l'information vraiment utile est enregistrée. |
 L'information redondante ne donne pas plus d'information que l'information vraiment utile. |
 Aprčs avoir entendu un opéra de Mozart, l'empereur d'Autriche a dit ŕ Mozart que son opéra contenait "trop de notes". A quoi Mozart a répondu que son opéra contenait juste autant de notes que requis. |
Mais, ici, le systčme d'instrumentation n'enregistre pas autant d'informations que requis; la plupart des informations qu'il enregistre sont vraiment redondantes. |
 Dans le rapport de mission d'Apollo 8, ils montrent ceci pour le schéma de l'interphone qui permettait aux nageurs de l'équipe de sauvetage de dialoguer avec l'équipage du module de commande. Mais ce schéma n'a pas de sens, car la sortie du haut-parleur, au lieu d'ętre la sortie d'un amplificateur, est une autre entrée de l'amplificateur qui permet d'amplifier la voix des nageurs; et, lorsque le bouton poussoir est pressé, la haut-parleur et le microphone sont tous deux connectés ŕ la liaison filaire communiquant avec l'équipage du module de commande, ŕ travers l'amplificateur. En fait, avec ce schéma, les nageurs cpouvaient directement parler ŕ l'équipage du module de commande ŕ travers le haut-parleur, sans męme presser le bouton poussoir, mais ils ne pouvaient entendre l'équipage. |
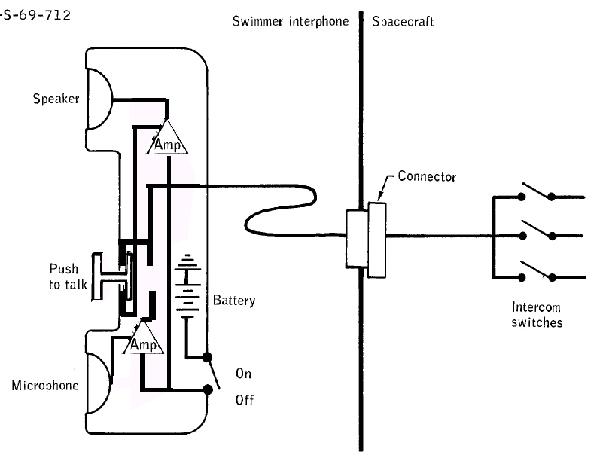 En fait, ceci est comment cet interphone aurait du ętre connecté. |
 Lorsque le bouton poussoir n'est pas pressé, l'entrée de l'amplificateur, dont le haut-parleur est une sortie, est connectée ŕ la liaison filaire qui communique avec l'équipage du module de commande. |
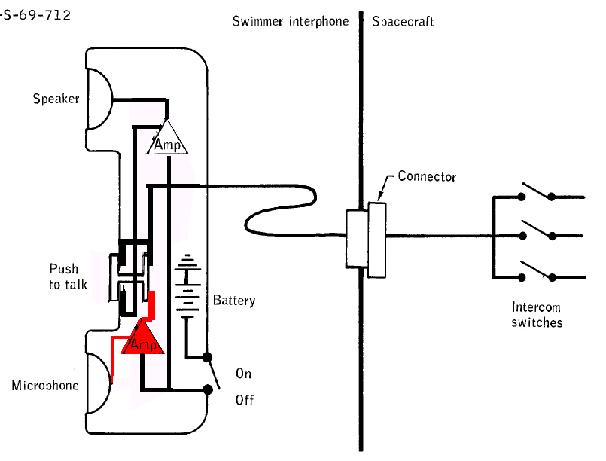 Et, lorsque le bouton poussoir est pressé, la sortie de l'amplificateur, dont le microphone est une entrée, est connecté ŕ la liaison filaire permettant la communication avec l'équipage du module de commande. |
 N'importe quel électronicien, ayant un minimum de compétence, verrait immédiatement que le schéma qu'ils montrent pour l'interphone est insensé, et saurait comment il devrait ętre fait. |

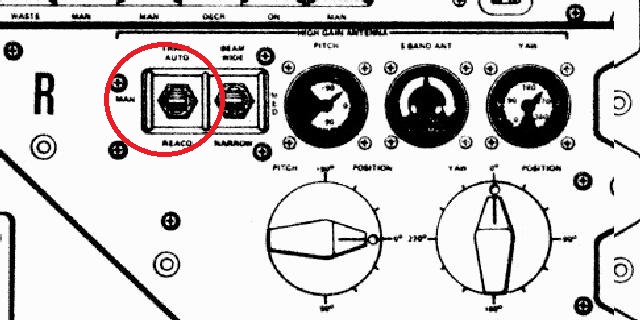
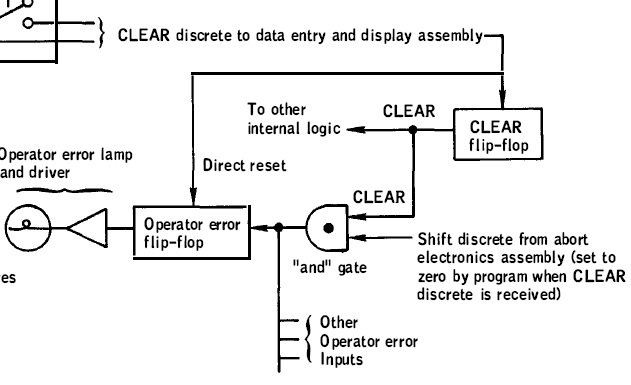 Dans le rapport de mission d'Apollo 9, ils disent que, lorsque le bouton poussoir de raz est pressé, cela éteint la lampe d'erreur opérateur, mais, si le signal de décalage est encore haut lorsque le bouton de raz est relâché, la lampe d'erreur opérateur se rallumerait, suivant ce qu'ils disent. |
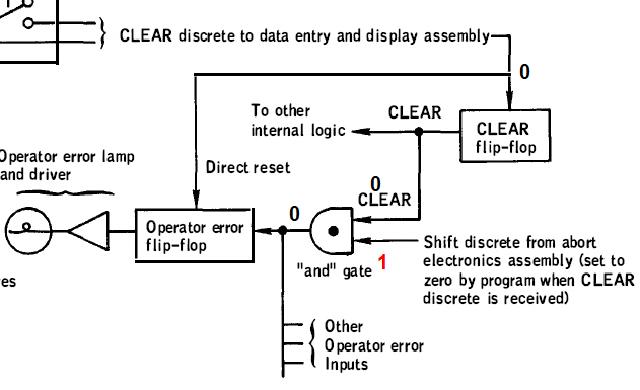 Le signal de raz et le signal de décalage sont des entrées d'une porte ET, dont la sortie permet d'allumer la lampe d'erreur opérateur lorsqu'elle est ŕ 1. La porte ET sort un 1 si ses deux entrées sont ŕ 1, et 0 sinon. Lorsque le bouton de raz est pressé, comme la porte ET a une de ses entrées ŕ 0, elle sort un 0, et donc la lampe d'erreur opérateur s'éteint. |
 Lorsque l'entrée de RAZ revient ŕ 1, si le signal de décalage est ŕ 1, la porte ET sort un 1, parce que ses deux entrées sont ŕ 1, et la lampe d'erreur opérateur s'allume; c'est ce qu'ils insinuent. |
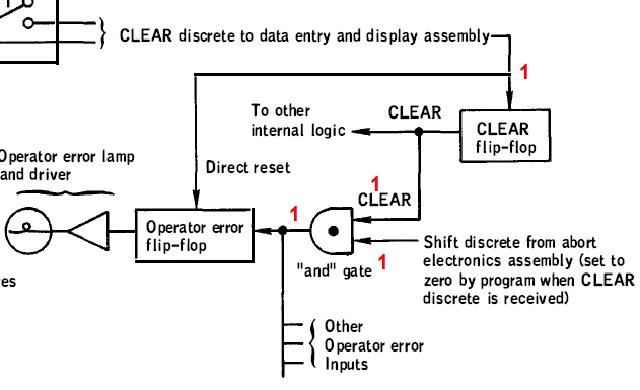
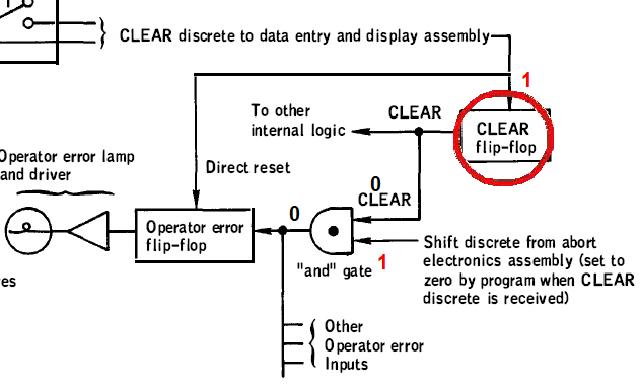 Mais en fait ce n'est pas directement le signal de RAZ qui est une entrée de la porte ET, mais c'est la sortie d'une bascule (cerclée de rouge) qui est mise ŕ 0 lorsque le signal de RAZ est mis ŕ 0, et elle reste ŕ 0 aprčs que le signal de RAZ soit revenu ŕ 1; la sortie de la bascule ne revient ŕ 1 que lorsque le signal de décalage est mis ŕ 0, mais ce dernier est couramment ŕ 1. Cela signifie que la porte ET, qui a la sortie de la bascule comme une de ses entrées, sort un 0 puisque la bascule sort couramment un 0, ce qui signifie que la lampe d'erreur opérateur ne s'allume pas, contrairement ŕ ce qu'ils ont dit. |
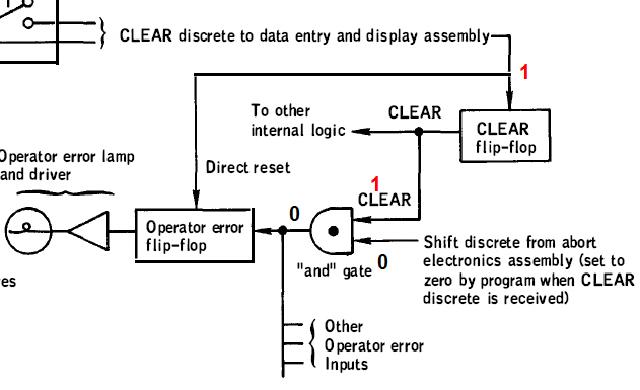 Lorsque le signal de décalage est mis ŕ 0, la bascule change d'état, et sort un 1 ŕ nouveau, mais, comme le signal de décalage est couramment ŕ 0, et est une entrée de la porte ET, la porte ET sort encore un 0, et la lampe d'erreur opérateur reste éteinte. Cela signifie que la lampe d'erreur opérateur ne s'allume pas si le signal de décalage est ŕ 1 au moment oů le bouton de RAZ est pressé; męme s'il redescend un moment aprčs que le bouton de RAZ ait été pressé, la lampe d'erreur opérateur ne s'allumera pas. |

 Dans Apollo 10, aprčs que le LGC ait cessé de commander le systčme d'articulation du moteur, celui-ci continuait de bouger pendant quelque temps, par inertie. Si ce temps restait limité, cela ne nuisait pas ŕ la commande du moteur. Dans Apollo 10, un test était fait 0,25 seconde aprčs l'arręt de la commande du systčme d'articulation pour voir s'il bougeait encore (en tangage et roulis). S'il était détecté comme bougeant encore, une alarme était affichée. Toutefois, comme cela n'a pas empęché de faire avec succčs la maneuvre de mise en phase, les ingénieurs ont conclu que le délai pour tester si le systčme d'articulation avait cessé de bouger pouvait ętre augmenté, et il a été mis ŕ 0,5 secondes pour Apollo 11, de sorte que l'alarme ne serait pas affichée dans une telle situation. |
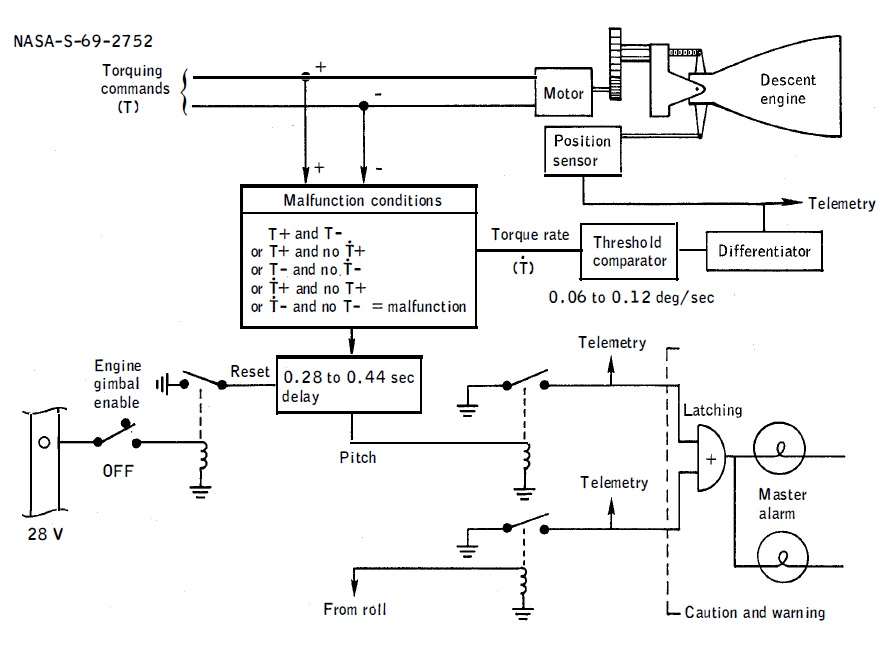 Ils montrent ceci pour le schéma du contrôle de l'orientation du moteur de descente. |
 Lorsqu'une commande est envoyée au systčme d'articulation, l'interrupteur qui est cerclé est fermé, ce qui alimente le relais électromécanique, lequel ferme un interrupteur qui permet de maintenir le timer en position de reset; le timer ne compte pas. |
 Lorsque la commande n'est plus envoyée au systčme d'articulation, l'interrupteur cerclé est ouvert, arręte d'alimenter le relais électromécanique, l'interrupteur qui maintenait le timer en position de reset est ouvert, et le timer commence de compter. |
 Aussi longtemps que le timer compte, si le taux de couple indique que le systčme d'articulation fait encore un mouvement de tangage, quoiqu'il ne reçoive plus de commande de tangage, le timer ne le sort pas. |
 Lorsque le timer a atteint son compte programmé, il cesse de compter, et alors le taux de couplage devrait indiquer que le systčme d'articulation ne fait plus de mouvement de tangage, ce qui est la situation normale. |
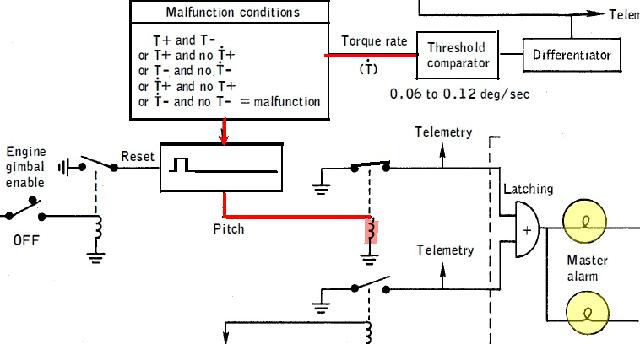 Mais, si, lorsque le timer a atteint son compte programmé, et cessé de compter, le taux de couple indique que le systčme d'articulation fait encore un mouvement de tangage, ce qui est une situation anormale, le timer sort un signal qui alimente un relais électromécanique, lequel ferme un interrupteur qui permet d'allumer les indicateurs d'alarme. Les astronautes sont avertis que le systčme d'articulation a pris trop de temps pour arręter de bouger aprčs qu'il ait cessé d'ętre commandé. Cela marche de maničre similaire pour le roulis. |
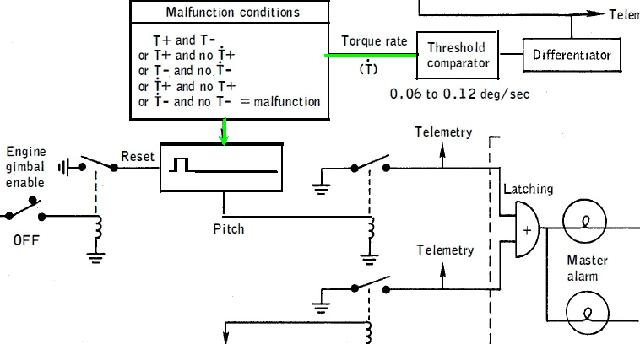
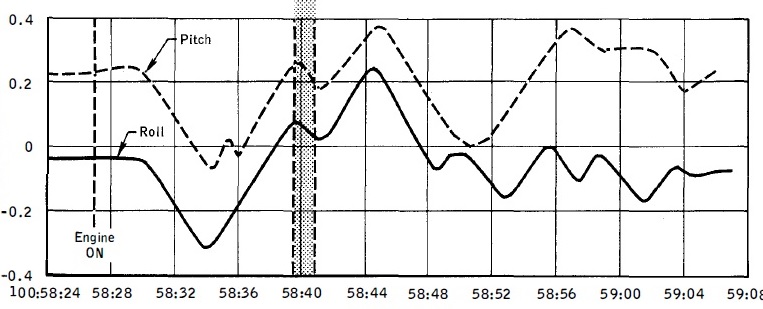 Dans Apollo 10, la zone grisée montre que, aprčs un délai de 0,25 seconde, le systčme d'articulation a été détecté comme étant encore en train de bouger au lieu d'ętre au repos. Les indicateurs d'alarme se sont allumés. |
 Mais, alors que, si le délai avait été augmenté de 0,25 seconde il n'aurait pas du y avoir d'alarme affichée, si je décale de 0,25 seconde la zone testée sur le graphe (zone colorée en rouge), nous constatons que, dans cette zone, le systčme d'articulation fait encore un mouvement de tangage et de roulis (c'est surtout visible sur le tangage, moins sur le roulis), ce qui signifie que, męme si le délai avait été changé comme ils prévoient de le faire sur Apollo 11, les indicateurs d'alarme se seraient encore allumés dans cette situation. |
 Cela ressemble ŕ une décision inappropriée des ingénieurs! |

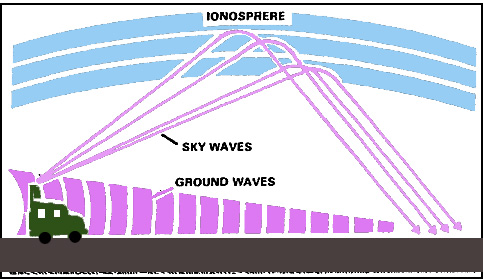
 Dans Apollo 11, lorsque l'antenne orientable a été sélectionnée aprčs l'acquisition sur la 4čme révolution, il y a eu des difficultés ŕ maintenir les communications. Ce serait parce que le schéma de la couverture de l'antenne ne prenait pas en compte les déflecteurs des plumes des réacteurs latéraux qui ont été ajoutés sur le module lunaire au site de lancement! Ceci montre le niveau du manque de professionalisme du projet (mais nous y sommes habitués). Le schéma de la couverture de l'antenne orientable S-Band impliquerait qu'il y a tout un ensemble de combinaisons des angles de tangage et lacet de l'antenne qui permettraient la communication. |
 En réalité il n'y a qu'une seule combinaison des angles de tangage et lacet qui permet la communication avec la terre, celle qui oriente l'antenne vers la terre. |
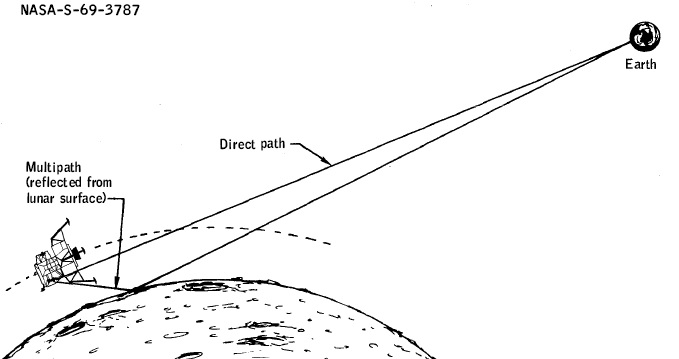 (Dans le rapport de mission d'Apollo 11) Ils parlent aussi d'un problčme de réception depuis des directions multiples qui diminueraient la qualité de la réception. Le signal venant de la terre et le signal réfléchi sur la lune de géneraient mutuellement et provoqueraient des pertes de réception. |
 Mais c'est complčtement ridicule, car, lorsque l'antenne est orientée vers la terre, elle ne reçoit que le signal venant directement de la terre, et pas celui réfléchi par la lune. |
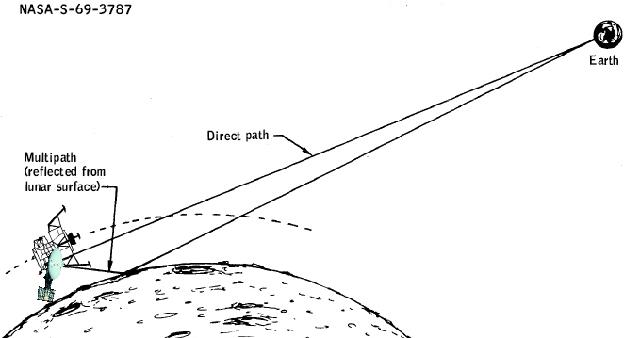 ...Et, lorsqu'elle est orientée vers la lune, elle reçoit seulement le signal réfléchi par la lune, et pas celui venant directement de la terre. |
 D'ailleurs, lorsque vous recevez une onde radio sur la terre, elle est réfléchie depuis différentes directions, et cela ne vous empęche pas de la recevoir correctement. Męme si elle vient de différentes sources, c'est le męme signal identique, qui est démodulé pour obtenir l'information qu'il contient. |
 Ils disent: "Operation of the S-band high gain antenna in the narrow beam mode resulted in a decrease of approximately 10 to 12 dB in both uplink and downlink signal strength on several occasions." Soit: "L'operation de l'antenne haut-gain S-Band dans le mode de faisceau étroit résulta en une perte d'approximativement 10 ŕ 12 db du signal ŕ la fois en réception et émission en plusieurs occasions." |
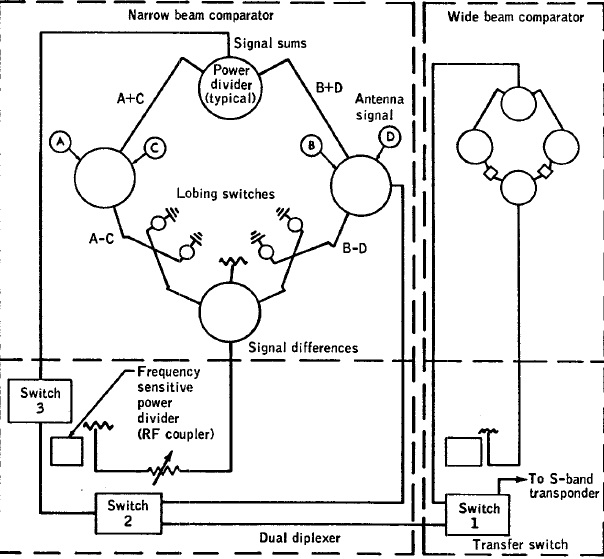 Les signaux reçus sur les paraboles sont comparés de maničre ŕ déterminer la direction du signal transmis depuis la terre, et cette comparaison permet d'orienter automatiquement l'antenne en direction du signal. Lorsqu'il y a une perte de puissance du signal, cela viendrait d'une liaison de circuit sensible ŕ la température qui ferait que le signal reçu sur une parabole serait déphasé de 180°; cela causerait une déviation de 5°, et une perte de gain de plus de 10 db. Ce serait l'exposition au soleil qui créerait une surchauffe causant ce problčme de fonctionnement. |
Mais l'exposition au soleil n'est pas trčs différente au long des révolutions; une révolution dure effectivement ŕ peu prčs deux heures, et le jour lunaire est long de presque un mois. Alors pourquoi tant de différences dans les diagrammes des gains? |
 De plus, sur le diagramme de la révolution 13, dans la partie du diagramme sur laquelle le gain montre des chutes brutales, il y a un pic qui monte au dessus de la valeur optimale du gain; comment est-il possible que le gain puisse ętre meilleur qu'optimal? |
 Le fait que le signal puisse perdre plus de 10 db forçait parfois les astronautes ŕ passer l'antenne en manuel. (Sur mon animation j'exagčre l'oscillation de l'antenne, cette oscillation n'a qu'un but illustratif, seulement pour montrer qu'elle est plus forte que normal). |
 Maintenant, si la parabole qui cause le problčme (i.e. qui est connectée ŕ la liaison sensible ŕ la température) est éliminée de la comparaison du signal, la déviation est nettement réduite de 5 degrés ŕ 1 degré, et la perte de gain devient 1.5 db au lieu de plus de 10 db si la parabole défaillante est gardée dans la comparaison du signal. (L'oscillation que je montre sur cette animation ne réflčte pas exactement la réalité, et est seulement destinée ŕ montrer l'importante différence entre le fait de garder la parabole défaillante dans la comparaison du signal et le fait de l'éliminer). |
 Je montre ici avec une ligne rouge une perte de de gain de 1.5 db relativement au gain optimal dans les différents diagrammes du gain oů il y a eu une perte de gain ŕ cause d'une liaison sensible ŕ la température causant le déphasage signal venant d'une parabole. Et nous voyons que, si la parabole était éliminée de la comparaison du signal, cela permettrait d'avoir une réception assez bonne du signal, parfaitement acceptable. Alors pourquoi en pas permettre aux astronautes d'éliminer une parabole défaillante au cas oů ce problčme se produit, plutôt que de passer en manuel? |
  Ici le problčme était intermittent, mais imaginez que le problčme soit devenu permanent au lieu de seulement ętre intermittent? Cela aurait forcé les astronautes ŕ rester en manuel lorsqu'ils voulaient avoir une bonne communication avec la terre. |
 Si les astronautes avaient la possibilité d'éliminer juste la parabole défaillante dans la comparaison du signal, cela permettrait de conserver le mode de pointage d'angle automatique, et d'avoir des communications correctes avec la terre, sans se soucier de réorienter l'antenne vers la terre eux-męmes. |
 Dans Apollo 12, le rapport de mission dit que les ingénieurs de la NASA avaient imaginé un systčme qui permettait d'enlever le bruit de la voix lorsque l'astronaute parlait dans le microphone. |
 Le principe était qu'un bruit pur était généré et soustrait du signal "Voix+Bruit", retirant ainsi le bruit du signal "Voix+Bruit" et permettant d'obtenir une voix pure, non polluée par le bruit. |
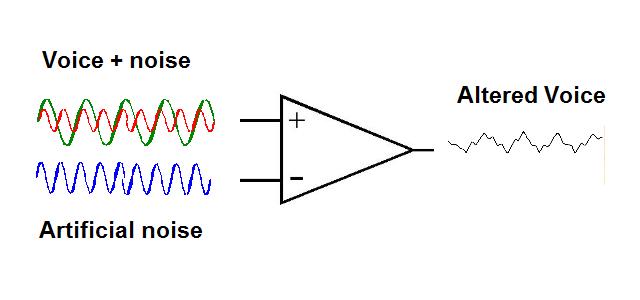 Le problčme est que, lorsque le casque acoustique n'était pas bien en place, le niveau du signal "Voix+Bruit" pouvait ne pas ętre ce qui était attendu, et le bruit pur, au lieu de simplement retirer le bruit dans le signal "Voix+Bruit", retirait également une partie de la voix, la déformant ainsi. Conséquemment, ils recommandaient aux astronautes de placer correctement leur casque acoustique, de maničre ŕ ce que cela n'arrive pas, et que le bruit puisse ętre correctement retiré par ce systčme, sans déformation de la voix. |
Mais c'est complétement ridicule. Dans mon schéma, j'ai simplifié la voix en la représentant comme une onde simple, et également le bruit. |
 En réalité la voix est faite de plein d'ondes de différentes fréquences et amplitudes appelées harmoniques. La synthése de voix fonctionne en créant ces harmoniques et en réglant l'amplitude des différentes harmoniques. Le bruit est également fait de différentes ondes de différentes fréquences et amplitudes, et ces fréquences et amplitudes sont toutes aléatoires. |
Cela signifie qu'il est complétement illusoire d'essayer de reconstituer le bruit qui est mélangé avec la voix; le bruit reconstitué ne reproduira jamais un bruit dont les harmoniques ont non seulement des fréquences et amplitudes aléatoires, mais également variables. Męme si le casque acoustique est bien en place, ce systčme dégradera la voix sans enlever le bruit qui l'accompagne (et męme en l'augmentant). |
 Cette idée bizarre que le bruit pouvait ętre éliminé avec du bruit fabriqué est encore un bon gag de la part des ingénieurs! |

 Dans le rapport de mission d'Apollo 13, Ils parlent ensuite de fluctuations dans le mode de zéro du systčme optique, et ils montrent ce schéma pour la "circuiterie du mode de zéro du systčme optique". En fait ce schéma est complčtement incohérent pour les raisons que je vais expliquer. |
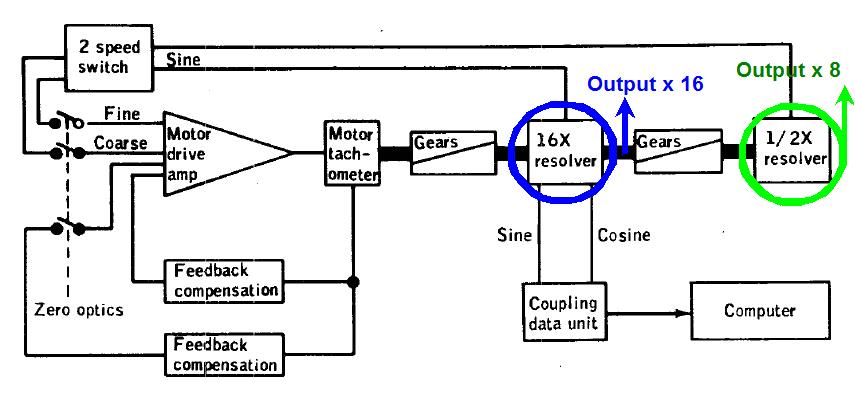 D'abord nous voyons que la sortie du tachymčtre est d'abord multipliée par 16 (en fréquence), puis divisée par 2, donnant un signal tachymčtrique multiplié par 8. |
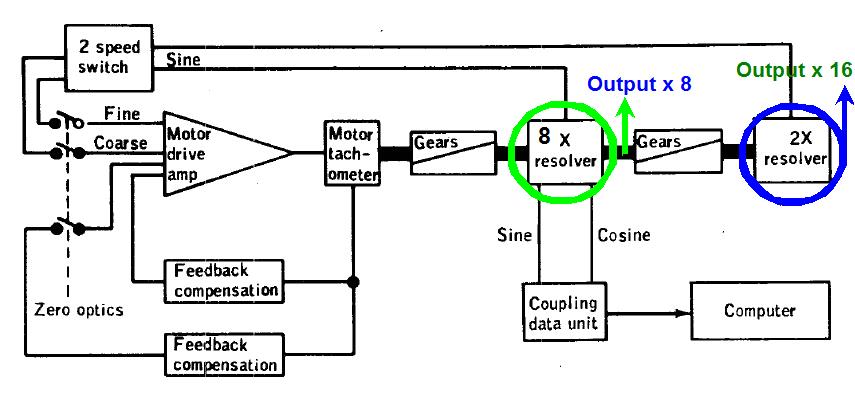 Ceci est illogique: Il serait plus simple de d'abord multiplier le signal tachymčtrique par 8, puis de le multiplier par 2, pour obtenir un signal multiplié par 16; nous obtiendrions les deux męmes signaux (en ordre inverse), mais de maničre plus simple, utilisant moins d'électronique. |
 Nous voyons ensuite qu'un sinus est appliqué ŕ l'un des deux signaux multipliés (mais pas l'autre); cela n'a pas de sens d'appliquer un sinus ŕ un signal pulsé. Puis les deux signaux multipliés sont rentrés dans un bloc de sélection de vitesse, lequel doit sortir un signal unique. Au lieu de cela, ce bloc de sélection sort deux signaux qui rentrent tous deux dans le bloc moteur. |
 La preuve que c'est une incohérence est que, dans le męme interface d'Apollo 12, ce bloc sort un seul signal, comme vous pouvez le voir. Mais cela ne signifie pas pour autant que celui d'Apollo 12 est normal; il est également délirant, mais de maničre différente. |
 Puis il y a un retour de compensation qui est appliqué de maničre permanente, mais il y en a un autre qui est appliqué dans le cas oů l'interrupteur de zéro est fermé; le second est inutile, car il y a déjŕ le premier. |
 Puis il y a deux signaux qui rentrent dans le CDU depuis le multiplieur de signal par 16. Le CDU (coupling data unit, unité de couplage) est un dispositif qui permet de transformer des signaux de donnée dans une forme exploitable pour l'ordinateur; ici cela consiste ŕ compter les impulsions du tachymčtre, et ŕ donner le compte correspondant ŕ l'ordinateur. Il y a deux signaux d'entrée, car la différence de phase entre les deux signaux permet de savoir dans quel sens le moteur tourne, et donc si les impulsions doivent ętre comptées ou décomptées. Mais, ce qui est anormal est que: 1) Des fonctions sinus et cosinus sont appliquées aux signaux pulsés, ce qui n'a pas de sens. 2) les entrées devraient venir directement de la sortie du tachymčtre, et non du signal multiplié. |
 La sortie du bloc moteur rentre dans un tachymčtre (cerclé de rouge). Mais qu'est-ce qu'un tachymčtre? |
 Un tachymčtre est un dispositif qui permet de générer des impulsions ŕ partir de la rotation d'une roue. Sa résolution est caractérisée par le nombre d'impulsions générées pour chaque révolution de la roue. Il permet de mesurer la rotation de la roue en comptant le nombre d'impulsions générées |
 Il permet aussi de mesurer la vitesse de rotation d'une roue; plus la fréquence des impulsions est élevée, et plus la roue tourne vite. Ce principe est utilisé pour mesurer la vitesse des voitures, puisque la vitesse de rotation des roues traduit la vitesse de la voiture. |
 Il permet également de suivre le déplacement d'un convoyeur; pour savoir de combien un convoyeur se déplace, le nombre d'impulsions lu est multipliée par la circonférence de la roue du tachymčtre, et divisé par le nombre d'impulsions par tour de la roue, pour finalement obtenir la distance dont le convoyeur s'est déplacé. |
 Ce principe est également utilisé dans les souris mécaniques. Alors que vous déplacez la souris, une boule sphérique tourne, laquelle fait tourner deux roues disposées perpendiculairement, qui chacune envoient des impulsions ŕ une circuiterie électronique alors qu'elles tournent, lesquelles sont comptées ou décomptées pour mettre ŕ jour la position de la souris dans les deux directions de déplacement de la souris. |
 Ceci est la maničre dont l'ordinateur peut savoir comment vous bougez la souris pour mettre ŕ jour la position du curseur souris sur l'écran. |
 Si nous corrigeons l'interface pour éliminer toutes les anomalies que nous avons relevées, nous obtenons ceci: - Le signal tachymčtrique est d'abord multiplié par 8, puis par 2, pour obtenir les deux signaux multipliés. - Les signaux multipliés sont rentrés dans le bloc de sélection de vitesse, sans appliquer un sinus ŕ l'un des deux signaux, et un seul sort du bloc de sélection. - le retour de compensation en trop est éliminé. - Les sorties du tachymčtre rentrent directement dans le CDU, sans leur appliquer de sinus et cosinus. Mais, si ce nouvel interface est plus logique que l'interface original, cela ne signifie pas pour autant qu'il est correct. |
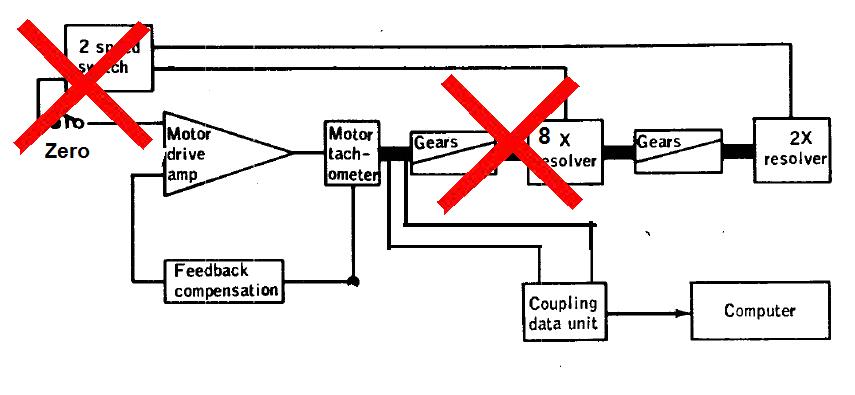 D'abord le zéro du systčme optique ne peut ętre obtenu simplement en rebouclant les signaux multipliés sur le bloc moteur. En effet, que signifie faire le zéro du systčme optique? Cela signifie que, lorsque le systčme optique est centré, le systčme doit ętre averti qu'il doit prendre la position courante comme position de référence, et compter ou décompter des impulsions ŕ partir de cette référence. Cela ne peut certainement pas ętre obtenu simplement en rebouclant les signaux multipliés ŕ partir du signal tachymčtrique. Donc, les blocs de multiplication du signal tachymčtrique sont inutiles, et les signaux de sortie de ces blocs ne doivent pas ętre rebouclés sur le bloc moteur. |
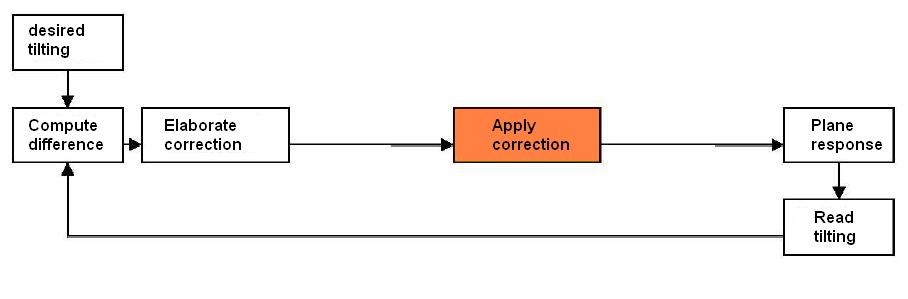 Et puis que signifie le retour de compensation, et quand est-il utilisé? Le retour de compensation est utilisé lorsque la commande doit produire un effet désiré, et l'effet produit peut ętre mesuré; l'effet désiré et l'effet mesuré sont alors différentiés et la différence est utilisée pour corriger la commande jusqu'ŕ ce que l'effet mesuré corresponde avec l'effet désiré. |
 Mais, dans le cas du systčme optique, le bloc moteur ne produit pas une commande, mais permet simplement de générer des impulsions, via le tachymčtre, qui sont comptées pour mesurer les déplacements du systčme optique. Il n'y a donc pas de raison d'utiliser un retour de compensation dans ce contexte. |
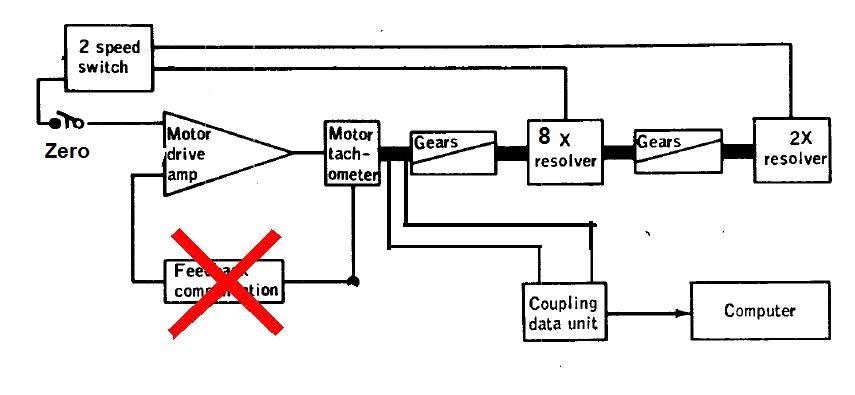
 Donc, finalement, aprčs avoir éliminé les parties inutiles qui ne devraient pas ętre lŕ, nous obtenons cet interface final: - le tachymčtre génčre des impulsions sur deux signaux, dont la différence de phase permet de savoir dans quel sens le moteur tourne (de maničre ŕ savoir si les impulsions doivent ętre comptées ou décomptées); ces deux signaux sont rentrés dans le CDU qui les compte (ou décompte); l'ordinateur peut lire le compte par une instruction I/O. - Un interrupteur (ou bouton poussoir) de zéro est connecté au CDU; quand cet interrupteur est activé, il envoie un signal au CDU qui permet de remettre ŕ zéro le compteur d'impulsions du CDU, de sorte que, lorsque l'ordinateur lit zéro sur le compteur, il sait que le systčme optique est couramment centré. A présent nous avons un interface de systčme optique cohérent. |

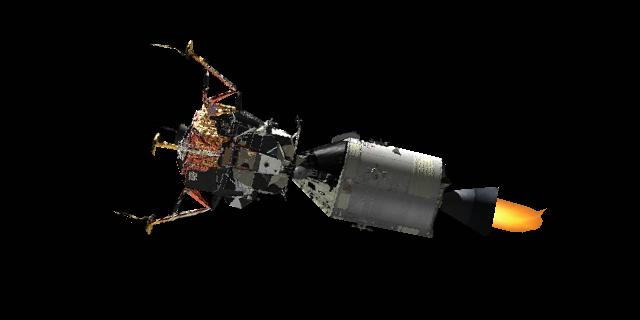
Aprčs l'injection translunaire, faite par le S-IVB (dernier étage de la fusée Saturn, contenant le module de commande et le module lunaire), le S-IVB ouvrait ses portes, le module de commande en sortait, s'avançait, faisait une maneuvre de retournement, revenait au S-IVB, s'arrimait au module lunaire qui était encore dans le S-IVB, l'extrayait du S-IVB, et le vaisseau spatial complet commençait alors son voyage vers la lune. Remarquez que, dans mon animation, j'ai représenté le module lunaire avec ses pattes déjŕ déployées, alors qu'en fait elles étaient encore repliées. |
 Dans Apollo 14, le module de commande aurait fait cinq tentatives infructueuses d'arrimage au module lunaire, et c'est seulement la sixičme qui a été couronnée de succčs, et a permis au module de commande d'extraire le module lunaire du S-IVB. |
 Ceci est le schéma qu'ils montrent pour l'assemblage du crochet d'arrimage du module de commande. Ils montrent le bras du systčme d'arrimage dans sa position verouillée, et, en pointillés, dans sa position ouverte. Ils disent que toutes les parties du systčme d'arrimage ont fonctionné normalement, et ils ne voient pas d'explication rationnelle pour son comportement anormal. Ils en viennent finalement ŕ la conclusion que le problčme aurait été causé par de la contamination externe, car le systčme aurait fonctionné normalement aprčs la sixičme tentative réussie, y compris lorsque le module lunaire s'est arrimé au module de commande aprčs son retour depuis la surface lunaire. |
 En fait, il y a une explication, et elle vient de la zone que j'ai cerclée. La cheville repose sur la roulette du bras sur le schéma, mais c'est parce que le bras du systčme d'arrimage est représenté dans sa position verrouillée. |
 Mais la cheville est articulée de telle maničre que, lorsque le bras du systčme est dans sa position ouverte, l'extręmité de la cheville descend au niveau de la roulette. |
 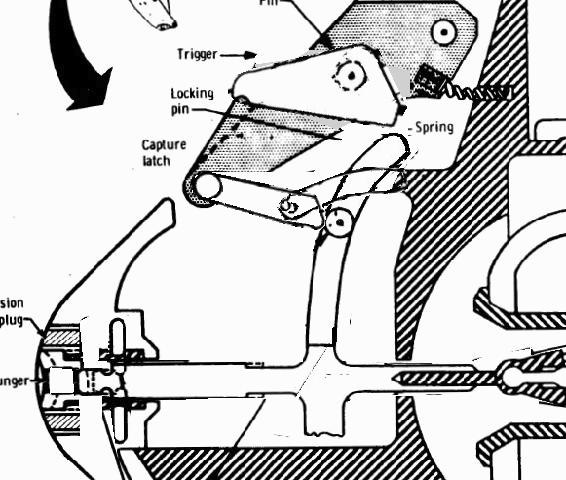 Le résultat est que, lorsque le bras est étiré, il est bloqué par l'extręmité inférieure de la cheville, et ne peut aller plus loin, il ne peut pas atteindre sa position verrouillée. |
 Donc, sur les cinq premičres tentatives, la cheville a bloqué le bras, et a reçu des chocs successifs de la part de la roulette du bras. |
 En raison de ces chocs successifs, l'extręmité de la cheville est devenue de plus en plus rognée. |
Donc, aprčs les chocs successifs reçu de la part de la roulette, la forme de l'extręmité de la cheville peut avoir changé suffisamment (ou le pourtour de la roulette peut avoir été érodé)... |
 ...de sorte que la roulette arrive ŕ passer sous la cheville, ce qui permettait au bras de s'avancer jusqu'ŕ sa position verrouillée. |
C'est ce qui s'est produit dans les multiples tentatives d'arrimage d'Apollo 14. Les cinq premičres tentatives ont permis de créer les conditions pour que la roulette puisse passer sous la cheville. |
 Et, ŕ partir de ce moment, la roulette pourra toujours passer sous la cheville, ce qui signifie que le bras pourra toujours atteindre sa position verrouillée quand étiré. C'est pourquoi l'arrimage du module lunaire au module de commande a réussi du premier coup lorsqu'il est retourné de la surface lunaire. |
Et cette explication est bien plus plausible que celle d'une contamination externe. |
 Bien sűr, les ingénieurs n'étaient pas si stupides qu'ils n'auraient pas pu faire les choses convenablement pour éviter ce problčme. C'est un indice manifeste qu'ils donnent du canular. |

 Dans Apollo 15, le signal du rover lunaire a été perdu 40 heures aprčs la remontée du module lunaire. Ils ont soupçonné un problčme dans la distribution de puissance du LCRU (Lunar Communications relay unit) Ils montrent ce schéma pour la distribution de puissance du LCRU. |
 Pour tester la perte de puissance de l'alimentation 16,5 volts, ils ont envoyé une voix depuis le sol, et ils ont essayé de recevoir le signal VHF en retour avec une antenne VHF de 45 mčtres. |
 Le LCRU est connecté ŕ l'antenne haut gain, lui envoie un signal UHF qui contient le signal vidéo de la caméra, et les voix des astronautes, reçues en VHF sur l'antenne omnidirectionnelle du LCRU, et l'antenne haut gain envoie ce signal UHF vers la terre. Inversement, l'antenne haut gain envoie au LCRU un signal UHF reçu depuis la terre, lequel contient la voix du sol et le signal de contrôle de la caméra; ce signal UHF est démodulé, le signal de contrôle de la caméra et la voix du sol en sont extraits, le signal de contrôle de la caméra envoyé ŕ la caméra télé, et la voix du sol envoyée aux astronautes ŕ travers l'antenne omnidirectionnelle VHF du LCRU. |
 De maničre ŕ ce que l'antenne haut gain soit capable d'envoyer le signal UHF vers la terre, elle doit ętre précisément orientée vers la terre. C'est pourquoi la caméra télé ne transmet pas vers la terre alors que le rover roule, car les cahots du rover empęchent l'antenne haut gain de rester correctement orientée vers la terre. A chaque arręt du rover, un astronaute réoriente l'antenne haut gain vers la terre, de sorte que la caméra puisse filmer les astronautes alors qu'ils se déplacent autour du rover. |
 Toutes les vidéos qui sont faites alors que le rover roule sont filmées par la caméra 16mm fixée au centre du rover, et ce qu'elle filme n'est directement transmis vers la terre, mais développé sur terre aprčs le retour de la mission. D'ailleurs on peut voir la caméra télé sur ces vidéos. |
Le signal UHF envoyé par l'antenne haut gain est reçu par une grande antenne parabolique sur terre; le signal est envoyé en UHF (ultra high frequency), car un signal VHF n'a pas une fréquence suffisamment élevée pour passer ŕ travers toute l'atmosphčre terrestre. |
 Ce qu'ils suggčrent est donc que le signal VHF de la voix du sol, envoyé par l'antenne omnidirectionnelle du LCRU, et qui est reçu par l'antenne du sac de survie des astronautes, puisse aussi ętre reçu sur terre... |
 ...Par une simple antenne VHF! |
 Mais, si c'était si simple que cela, pourquoi se soucieraient-ils d'envoyer les communications ŕ travers l'antenne haut-gain? Et, puisque l'antenne du LCRU est omnidirectionnelle... |
 ...La vidéo de la caméra télé pourrait ętre envoyée ŕ la terre męme lorsque le rover roulait! |
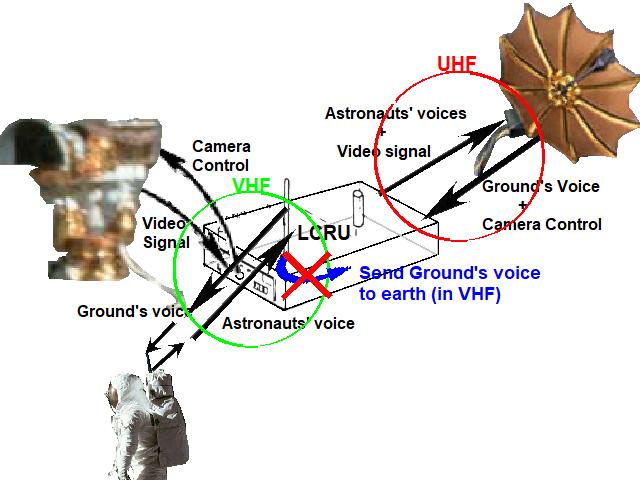 La réalité est qu'il n'y a pas moyen que le signal VHF de la voix du sol, envoyée par la petite antenne omnidirectionnelle du LCRU, puisse atteindre la terre, et ętre reçue par une antenne VHF sur terre. |
 La seule maničre que cela puisse avoir fonctionné est qu'il y ait eu une possibilité de reboucler la sortie du signal de la voix du sol sur l'entrée des voix des astronautes, de sorte que la voix du sol puisse moduler l'onde UHF, et ętre envoyée ŕ la terre ŕ travers l'antenne haut gain, et ętre reçue, en UHF, par une grande antenne parabolique. Mais cette possibilité n'avait pas été prévue, et donc il n'était pas possible de procéder de cette maničre. |
 En d'autres termes, le test qu'ils prévoient de faire pour tester l'alimentation 16,5 volts est tout simplement impossible ŕ faire, une fantaisie complčte... |
...Et, bien sűr, les ingénieurs le savaient parfaitement, car c'est encore un de leurs bons gags! |

 Dans les premičres missions, la descente était faite en une étape: Aprčs que le module lunaire se soit séparé du module de commande, il initiait une maneuvre d'insertion sur une orbite de descente (en diminuant un peu sa vitesse orbitale pour prendre l'orbite de descente), et, aprčs qu'il ait atteint une orbite plus proche de la lune, il commençait la descente motorisée. Dans les derničres missions, la descente était faite en deux étapes; Le vaisseau spatial complet faisait une premičre maneuvre d'insertion sur une orbite de descente, en utilisant le moteur du module de service, et, aprčs qu'il ait atteint une orbite plus proche de la lune, le module lunaire se séparait du module de commande, suivait l'orbite pendant un moment, et il initiait une seconde maneuvre d'insertion sur une orbite de descente, et, aprčs avoir atteint une orbite encore plus rapprochée de la lune, il commençait la descente motorisée. |
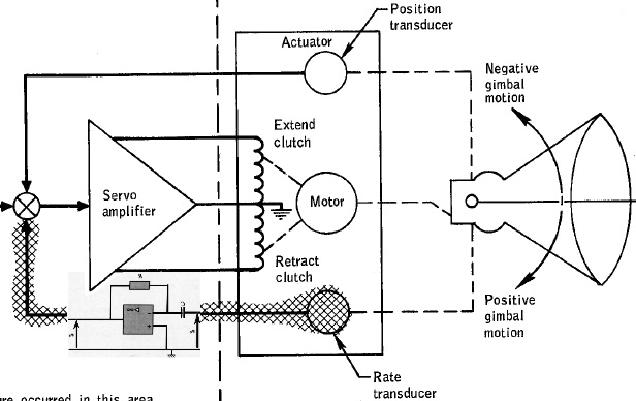
 Mais, dans Apollo 16, il y aurait eu un petit problčme avec le module de service, qui a retardé la procédure d'initiation pour prendre l'orbite de descente "ŕ cause d'oscillations détectées dans un actuateur secondaire d'articulation de lacet sur le systčme de propulsion du module de service pendant les tests de systčmes pour la maneuvre de circularisation." La conséquence est que la descente motorisée aurait également été retardée. |
 Dans le rapport d'anomalies, ils donnent une explication ŕ propos de ce problčme. Leur analyse a conclu qu'il y aurait eu un problčme électrique, avec des oscillations détectées ŕ cause de parasites sur le rebouclage du taux de mouvement positif sur l'entrée du servo de l'articulation. |
 Mais, en fait, seul le mouvement de l'articulation (coloré en vert), aprčs avoir été converti en un signal électrique par le transducteur, aurait du ętre rebouclé sur l'entrée du servo. Le taux de mouvement de l'articulation (coloré en rouge) n'aurait pas du ętre rebouclé sur l'entrée du servo. Et ce n'est męme pas un signal électrique correspondant aux taux de mouvement de l'articulation qui est obtenu aprčs le transducteur, mais c'est encore un signal électrique correspondant au mouvement de l'articulation. De maničre ŕ obtenir le taux de mouvement de l'articulation, le signal électrique du mouvement de l'articulation devrait ętre passé ŕ travers un circuit qui le convertit en sa dérivée. |
 Le circuit électronique qui permet de dériver un signal utilise un amplificateur opérationnel, et je montre ici comment ce circuit fonctionne. |
 Un amplificateur opérationnel a différents usages; il peut ętre utilisé pour ajouter des courants, les soustraire, les multiplier, les diviser, les intégrer, ou les dériver. Il est utilisé dans les calculateurs analogiques; le programme d'un calculateur analogique consiste en fait ŕ connecter entre eux des amplificateurs opérationnels, ces amplificateurs opérationnels étant mis soit en additionneur, soit en soustracteur, soit en multiplicateur, soit en diviseur, soit en intégrateur, soit en dérivateur. Un calculateur analogique est bien adapté pour simuler le comportement des avions, mais n'espérez pas l'utiliser pour jouer ŕ un jeu vidéo. |
 Un calculateur hybride est une association entre un calculateur analogique et un ordinateur; le calculateur analogique est programmé avec des cables connectant les amplicateurs opérationnels entre eux, et l'ordinateur est programmé avec des instructions; ils communiquent l'un avec l'autre ŕ travers des convertisseurs analogique vers digital et digital vers analogique. J'en ai une fois utilisé un pour faire une étude sur des missiles air-air. |
 Cela signifie donc que, sur la branche inférieure du servo, un circuit électronique pour convertir le signal électrique du mouvement de l'articulation en sa dérivée, de maničre ŕ obtenir son taux, aurait du ętre rajouté avant de le reboucler sur l'entrée du servo. Bien sűr, c'est seulement dans l'hypothčse oů le taux du mouvement de l'articulation aurait du ętre rebouclé sur l'entrée du servo. |
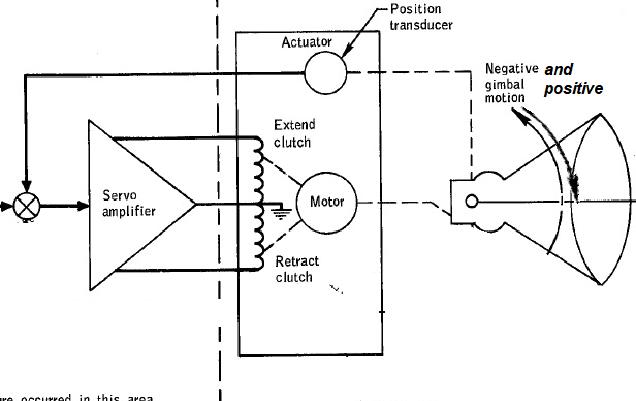 Car, en réalité, cela n'aurait pas du ętre le cas. La branche inférieure du servo n'aurait pas du exister, seulement la branche supérieure. Seul le mouvement de l'articulation, aprčs avoir été converti en signal électrique par le transducteur, aurait du ętre rebouclé sur l'entrée du servo, que ce soit un mouvement positif ou négatif. |
L'explication qu'ils donnent pour les oscillations du systčme d'articulation du module de service est donc insensée. |
 Il est manifeste que c'est seulement pour ajouter du bon vieux suspense pour ceux qui en raffolent. |
Et, en męme temps pour donner un nouvel indice du trucage. |

 Dans le rapport de mission d'Apollo 17, ils disent que le pilote du module de commande a comparé sa détermination de la mesure d'altitude différentielle de l'horizon terrestre avec une valeur stockée dans la mémoire effaçable de l'ordinateur. |
 Ils disent aussi qu'un programme pour la navigation de mi-course cislunaire, logé dans la memoire effaçable de l'ordinateur, a été utilisé ŕ travers toute la mission, et a été trčs utile. |
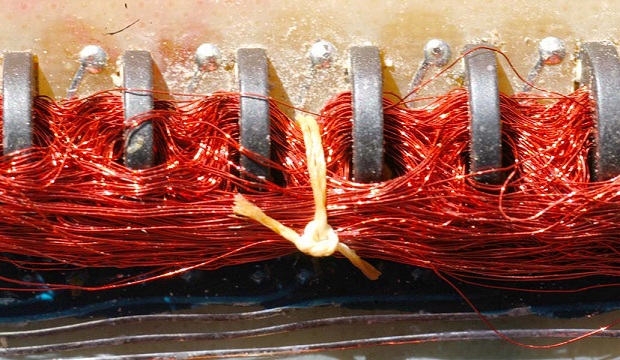
 L'AGC utilisait deux types de mémoire; 1) La mémoire ŕ cordes de tores consistait en des tores ŕ travers lesquels des fils pouvaient passer, lesquels représentaient des bits ŕ 1, ou d'autres qui pouvaient passer par dessus, lesquels représentaient des bit ŕ 0. Son avantage était qu'elle pouvait garder son contenu męme lorsque l'AGC n'était pas alimenté; mais son inconvénient était qu'elle pouvait seulement ętre lue, et non écrite. Elle contenait tous les programmes de l'AGC. 2) La mémoire effaçable était utilisée de maničre dynamique; elle pouvait ŕ la fois ętre lue et écrite, contrairement ŕ la mémoire ŕ cordes de tores, mais son inconvénient sur la mémoire ŕ cordes de tores était qu'elle ne pouvait garder son contenu lorsque l'AGC n'était pas alimenté. |
 Dans les années 60 et 70, les ordinateurs étaient de grosses machines qui étaient contrôlées par des spécialistes, et les utilisateurs n'en avaient pas un accčs direct. Ils donnaient aux opérateurs des paquets de cartes perforées, que les opérateurs entraient dans l'ordinateur, et obtenaient en retour des listings correspondant au résultat de leurs programmes. |
 Le systčme de fonctionnement était chargé dans ces ordinateurs au démarrage, ŕ partir de bandes magnétiques. |
 Ces ordinateurs avaient aussi une mémoire ŕ cordes de tores, mais elle ne contenait qu'un programme de démarrage permettant de charger le systčme de fonctionnement ŕ partir de bandes magnétiques. D'ailleurs ces mémoires ŕ cordes de tores avaient une capacité trop faible pour contenir le systčme de fonctionnement. |
De plus, le systčme de fonctionnement était souvent modifié pour ętre amélioré et corrigé, et faire ces corrections dans la mémoire ŕ cordes de tores aurait été un processus pénible et long, alors que c'était relativement facile de le faire sur les bandes magnétiques. |
 Dans les premiers ordinateurs portables (comme le fameux Apple II), le systčme de fonctionnement était contenu dans une rom (read only memory, l'équivalent de la mémoite ŕ cordes de tores, quoique, ŕ l'époque, il était plus facile de programmer ces roms que la mémoire ŕ cordes de tores), et l'utilisateur pouvait sauver ses programmes sur une cassette. Mais ce processus de sauvegarde était assez lent et pas trčs sűr. Si le volume d'enregistrement était mal réglé, le programme pouvait ętre mal enregistré, et il ne pourrait jamais ętre rechargé. Męme s'il avait été correctement enregistré, si le moindre dommage était fait ŕ la cassette, il pouvait aussi ne jamais pouvoir ętre rechargé. Et, męme s'il était correctement enregistré sur la cassette, le rechargement ne réussissait pas toujours au premier essai, si le volume n'était pas bien réglé, et il devait alors ętre fait une seconde fois. C'est dire combien la sauvegarde des programmes faite de cette maničre archaďque était plutôt pénible et peu sűre. |
 Puis, un peu plus tard, les disques floppy ont commencé d'apparaître, ce qui rendait le processus de sauvegarde plus aisé et plus sűr. Ces disques floppy avaient une taille plutôt grande, et avaient une capacité plus petite que les disquettes actuelles. Mais leur utilisation était quand męme un réel progrčs, comparée avec l'utilisation de cassettes. |
 Puis la taille des disquettes a diminué, en męme temps que leur capacité augmentait. |
 Puis les disques durs ont commencé d'apparaître. Le premier disque dur que j'ai connu était plutôt gros, et n'avait qu'une capacité de 5 méga-octets; il était plus lent et bruyant que les disques durs actuels, mais c'était pourtant un progrčs réel comparé avec les disquettes de l'époque, et il avait une capacité nettement plus grande (les disquettes de l'époque avaient une capacité de moins de 100 kilo-octets). Cette photo montre un disque dur de l'époque, et un disque dur moderne, qui, quoique bien plus petit que l'ancien disque dur, a une bien plus grande capacité, et est nettement plus rapide. |
 Et, finalement, nous connaissons maintenant les clés USB, qui ont une grande capacité, comparée avec la capacité des premičres unités de stockage, et qui permettent de transférer aisément des fichiers d'un ordinateur ŕ un autre. |
 Il n'était pas possible de stocker des données en avance dans la mémoire effaçable, car l'AGC n'était pas alimenté au lancement de la fusée Saturn, mais seulement un peu plus tard (selon le rapport de mission). |
 Toute la technologie que nous venons de voir n'existait pas au temps d'Apollo, ŕ part la possibilité de charger des données depuis un lecteur de cassette. Mais le chargement de données depuis un lecteur de cassette aurait été plutôt hasardeux, comparé avec la fiabilité de la mémoire ŕ cordes de tores, car il n'y a pas de garantie que cela marcherait, et, contrairement ŕ la mémoire ŕ cordes de tores, la bande magnétique pourrait ętre endommagée par les radiations. Cette possibilité n'avait donc pas été prévue par les ingénieurs. |
Le programme pouvait aussi ętre transféré depuis la mémoire ŕ cordes de tores vers la mémoire effaçable, mais cela n'a pas de sens, car le programme pouvait aussi ętre directement exécuté dans la mémoire ŕ cordes de tores, et la mémoire effaçable avait beaucoup moins de capacité que la mémoire ŕ cordes de tores (16 fois moins). La mémoire effaçable était aussi utilisée pour allouer des ressources mémoire utilisées par les programmes, et nous savons que l'AGC ŕ dysfonctionné dans la descente d'Apollo 11 parce qu'il était devenu ŕ court de ressources mémoire. |
 Donc, le fait que le programme pour la navigation de mi-course cislunaire aurait été logé dans la mémoire effaçable au lieu de la mémoire ŕ cordes de tores n'a pas de sens... |
...et est ŕ nouveau un gag de la part d'ingénieurs facétieux! |

