L'ETRANGE DESCENTE D'APOLLO 11

 Les gens pensent souvent que le module lunaire a commencé sa descente motorisée (i.e. utilisant le réacteur pour la descente) dčs qu'il a quitté le module de commande. Mais l'altitude ŕ laquelle le module de commande volait n'était pas l'altitude idéale pour commencer la descente motorisée; l'altitude idéale était beaucoup plus basse. La solution qui a donc été choisie a été de faire le module lunaire joindre une orbite qui avait cette altitude idéale en lui faisant suivre une orbite de transfert, c'est ŕ dire une orbite dont la distance ŕ la surface lunaire varie au long de sa trajectoire. Cette orbite de transfert: - Doit toucher l'orbite du module de commande ŕ une extręmité. - Doit toucher l'orbite avec l'altitude idéale ŕ l'autre extręmité. - Et doit avoir comme un de ses foyers le centre de la lune, de maničre que le module lunaire puisse la suivre naturellement, sans utiliser son réacteur, et de sorte qu'il puisse disposer de la quasi-totalité de son carburant lorsqu'il débute la descente motorisée proprement dite depuis l'orbite rapprochée. Les ingénieurs de la NASA ont décidé que l'altitude désirée de l'orbite rapprochée pour débuter la descente motorisée serait de 48814 pieds, ce qui fait 14878 en mčtres (prčs de 15 kilomčtres, donc nettement plus bas que l'orbite du module de commande qui était ŕ 110 km). Ceci permet de complčtement définir l'orbite de transfert, puisque ses extręmités sont connues. La loi de Kepler permet de calculer la vitesse orbitale du module de commande au point de contact, ansi que celle de l'orbite de transfert. Au point de contact: - La vitesse orbitale du module de commande était de 1722,66 m/s. - La vitesse orbitale d'un satellite suivant l'orbite de transfert était de 1599,95 m/s. Cela fait une différence de 22,71 m/s, ce qui exprimé en pieds/s donne 75,7 pieds/s. C'est la différence de vitesse que le module lunaire doit réduire pour se placer sur l'orbite de transfert désirée. Dans la documentation ils disent que la différence de vitesse est de l'ordre de 75 pieds/s; vous voyez donc que mon estimation est assez bonne, en fait plus précise. Pourquoi dois-je ętre si précis? Parce qu'une différence d'un pied/s dans la différence de vitesse résulte en une variation d'altitude de 1250m ŕ l'autre bout de l'orbite de transfert; vous voyez donc l'importance d'ajuster avec précision la variation de vitesse. Juste pour vous donner une idée, si la réduction de vitesse était de 85 pieds/s au lieu de 75 pieds/s, le module lunaire arriverait au niveau de la surface lunaire ŕ l'autre bout de l'orbite de transfert. Vous pourriez penser que, lorsque le module arrive ŕ l'autre bout de l'orbite de transfert, il devrait augmenter sa vitesse pour se placer sur l'orbite plus basse, mais c'est le contraire, il doit ŕ nouveau réduire sa vitesse de pratiquement la męme quantité, car sa vitesse s'accroît de maničre naturelle au long de l'orbite. |
 Maintenant, dans la documentation, ils disent que la maneuvre initiale de réduction de vitesse (pour placer le module lunaire sur l'orbite de transfert) se fait en trois étapes: 1) Une application de 10% de la poussée maximale pendant 15 secondes. 2) Une application de 40% de la poussée maximale pendant 13 secondes. 3) Enfin une réuction finale de 12 pieds/s pendant 3 secondes. Si nous appelons Am la décélération maximale lorsque le réacteur pousse au maximum, le décrément total de vitesse peut ętre exprimé par la formule: Décrément total de vitesse = Am*(15*0,10)+Am*(13*0,40)+12=Am*6,7+12 |
 Maintenant, est-ce que nous avons un moyen de connaître Am? Oui, grâce aux spécifications du module lunaire: Selon la NASA; le module lunaire avait une masse totale de 15200kg, pour les séries H (celles des premičres missions). - Le réacteur du module avait une force de 43900 Newtons, selon la NASA. Le réacteur du module lunaire, avec des réservoirs pleins et une poussée maximale, pouvait donner une accélération égale ŕ: Am=43900/15200=2,888 m/s˛=9,627 pieds/s˛ |
 Nous pouvons donc maintenant calculer le décrément initial de vitesse généré par la poussée du réacteur: Décrément de vitesse=9,627*6,7+12=76,5 pieds/s. Vous direz que cela ne fait pas beaucoup de différence avec la réduction de vitesse qui doit ętre appliquée, mais une variation d'un pied par seconde dans la réduction de vitesse cause une variation d'altitude de 1250 mčtres ŕ l'autre bout de l'orbite, et cette variation pourrait faire échouer la descente motorisée. Ici nous avons une différence de 1,5 pied/s avec la différence de vitesse qu'ils annoncent dans la documentation, et 0,8 pied/s avec la différence de vitesse que j'ai moi-męme calculée. Mais męme 0,8 pied/s de différence représente une variation d'un kilomčtre d'altitude ŕ l'autre bout de l'orbite, et ŕ un kilomčtre au-dessus de la surface lunaire, dans la descente motorisée décrite, le module lunaire avait encore des vitesses horizontale et verticale qui étaient loin d'ętre négligeables, et qui l'auraient empęché d'alunir. La derničre étape fait perdre 12 pieds/s au module lunaire en 3 secondes; avec la poussée maximale, il perdrait ces 12 pieds/s en: 12/9,627=1,246s. Cela signifie que, pour réduire la vitesse de 12 pieds/s en 3 secondes, le module a appliqué une fraction de la poussée égale ŕ 1,246/3=0,41, soit 41%, pratiquement la męme chose que dans la seconde étape. Maintenant, pourquoi la maničre dont le module a décru sa vitesse est-elle problématique? Parce qu'il commence avec une poussée faible (10% de la poussée maximale) et finit avec une poussée plus importante (40% de la poussée maximaleŕ; avec 40% de la poussée maximale, le module lunaire perd 4 pieds/s en une seconde, et, avec 10% de la poussée maximale, il perd 1 pied/s en une seconde; il est évident qu'il aurait mieux valu finir la réduction de vitesse avec 10% plutôt que 40% de maničre ŕ ajuster aussi précisément que possible la réduction de vitesse, puisque la précision de la réduction de vitesse a tant d'impact sur l'altitude ŕ l'autre bout de l'orbite de transfert. |
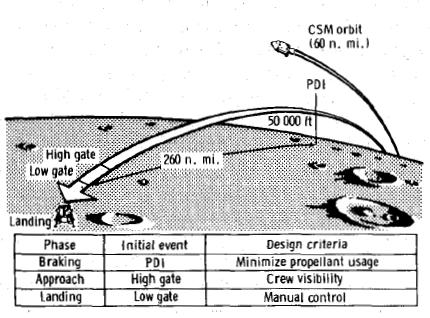 Une fois que le module lunaire a atteint l'orbite rapprochée, il commence effectivement la descente motorisée, i.e. utilisant le réacteur pour descendre vers la surface lunaire. La procédure d'alunissage se fait en plusieurs phases, en commençant par une phase de ralentissement qui permet au module lunaire de perdre la plus grande partie de sa vitesse horizontale. Le module lunaire a en effet une trčs importante vitesse horizontale initiale relativement ŕ la lune de l'ordre de 6000km/h, qu'il doit absolument perdre avant d'alunir; imaginez ce qui arriverait s'il se posait avec une telle vitesse; il serait littéralement pulvérisé! |
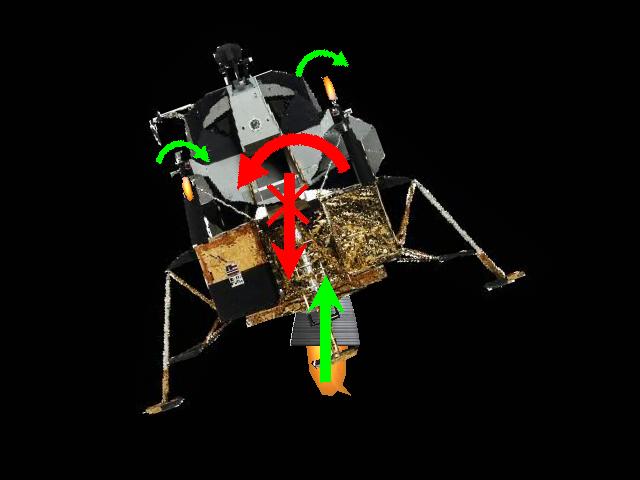
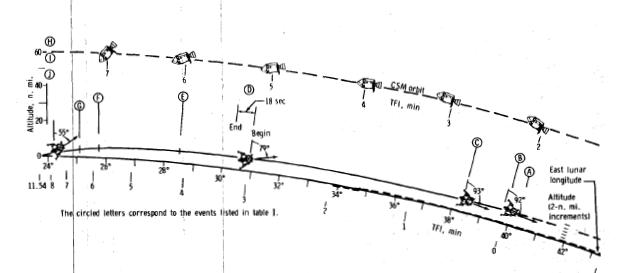 Pendant la phase initiale, le module lunaire est orienté horizontalement, car il doit utiliser la poussée de son réacteur pour contrer la vélocité horizontale, et la faire diminuer. Initialement, la force centrifuge permet de contrer l'attraction lunaire, ce qui signifie qu'elle n'a pas besoin d'ętre contrée. Progressivement, alors que le module perd sa vélocité horizontale, la force centrifuge décroît, ce qui signifie que l'attraction luanire tend ŕ attirer de plus en plus le module lunaire vers la lune et ŕ augmenter la vitesse verticale. Mais, durant la phase initiale de ralentissement, sa vélocité verticale reste faible relativement ŕ la trčs importante vélocité horizontale, et représente seulement un centičme de celle-ci, ou dans cet ordre. Donc, durant cette phase, le module ignore l'attraction lunaire, et consacre la poussée de son réacteur essentiellement ŕ diminuer l'importante vélocité horizontale, ce qui signifie qu'il reste horizontal. Aprčs cette phase, il commence ŕ tourner en position verticale, de maničre ŕ commencer de contrer l'attraction luanire avant que la vélocité verticale ne devienne trop importante, modérément d'abord, puis de plus en plus ŕ mesure que la vélocité horizontale diminue, pour finir complčtement vertical ŕ la fin. |
 L'attitude du module lunaire est trčs importante, car cette attitude permet de distribuer la poussée du réacteur sur les deux axes; la composante verticale de la poussée permet de contrôler la vitesse verticale, tandis que la composante horizontale de la poussée permet de contrôler la vitesse horizontale. Cela signifie que, tout au long de la descente, le module lunaire est orienté suivant la trajectoire qu'il suit, car c'est son attitude qui permet de contrôler la descente. Le changement d'attitude du module lunaire est trčs progressif, depuis une attitude horizontale au début de la descente motorisée, vers une attitude verticale ŕ sa fin, et ne doit jamais ętre brutal. Jusqu'ŕ présent, les explications ont été un peu théoriques, et peuvent ne pas ętre si simples ŕ comprendre pour un néophyte, mais ce qui suit va ętre plus simple ŕ comprendre. |
 Dans une vidéo, ils montrent alternativement le module lunaire tel que vu depuis le module de commande, et le module de commande tel que vu depuis le module lunaire. J'ai mis les deux animations côte ŕ côte, de maničre que nous voyions mieux les problčmes les concernant. Vous voyez que le module de commande tourne en sens inverse de celui du module lunaire, ce qui est tout ŕ fait normal, et aussi que le sol lunaire bouge en direction opposée sur les deux animations, ce qui est également normal. Mais: - Le module de commande tourne moins que le module lunaire, alors qu'il devrait tourner autant. - Le module de commande s'approche au lieu de s'éloigner comme le fait le module lunaire. - Et le sol lunaire que nous voyons défiler sous le module de commande et le module lunaire n'est manifestement pas le męme: En effet, nous voyons sous le module lunaire une tache blanche plus importante que les autres, qui a la forme d'un fer ŕ cheval, et que nous ne voyons pas sous le module de commande. |
 Puis, il y a une photo d'Apollo 11 (AS11-37-5445), prise depuis le module lunaire, qui montre la surface lunaire derričre le module de commande; cela signifie que le module n'est pas sous, mais au-dessus du module de commande. Pourtant ce n'est pas le module de commande qui est supposé descendre vers la lune, mais le module lunaire. |
 Certains disent que c'est juste une maneuvre de séparation illustrée dans cette animation... |
 ...Mais le module lunaire n'a pas besoin de se séparer du module de commande de cette maničre, il était beaucoup plus simple et plus logique de faire la séparation comme cette animation le montre. |
 Et, męme si les ingénieurs de la NASA avaient décidé de faire la séparation de cette maničre bizarre, cela n'explique toujours pas pourquoi le module de commande aurait besoin d'ętre si éloigné en dessous du module lunaire. |
 Car...  ...Il ne fait pas de doute que c'est bien le module de commande que nous voyons tellement en-dessous du module lunaire, plus proche de la lune. |
 Il y a donc quelque chose d'anormal, lŕ...A moins que les ingénieurs de la NASA n'aient décider de faire alunir le module de commande ŕ la place du module lunaire! |
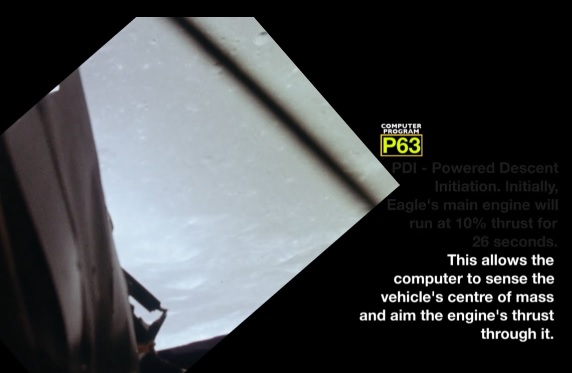 Le module lunaire commence la descente en n'appliquant au réacteur que 10% de sa poussée maximale, et ils l'expliquent de la maničre suivante: "C'est pour permettre ŕ l'ordinateur de repérer le centre de masse du véhicule et diriger la poussée du réacteur vers celui-ci". Ceci demande une explication. |
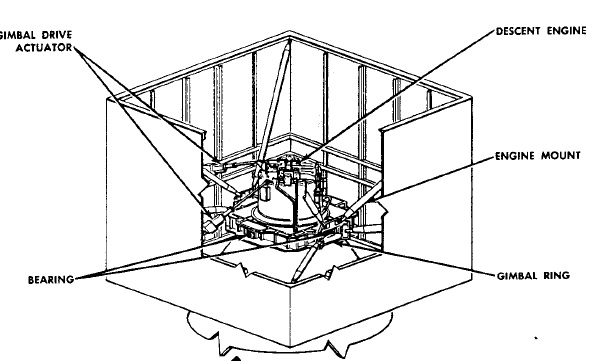 Le module lunaire pouvait faire pivoter son réacteur jusqu'ŕ 6 degrés. |
 Certains pensent que cette possibilité de faire pivoter le réacteur permettait au module lunaire de se pencher relativement ŕ son réacteur, et aux astronautes d'avoir une vue sur le sol lunaire. Mais en fait ce n'est pas pour cette raison que le réacteur pouvait pivoter. |
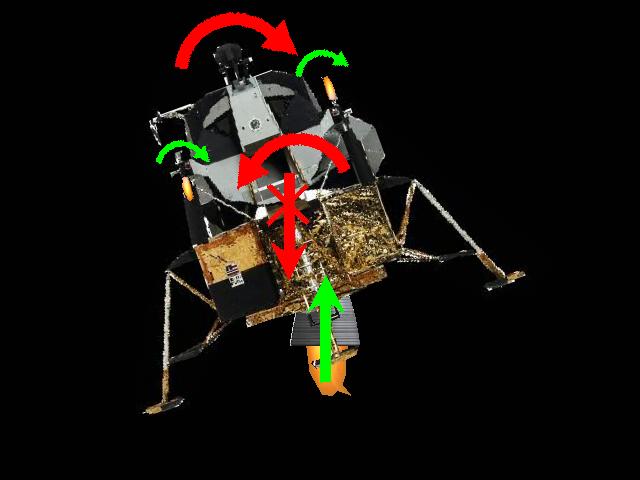
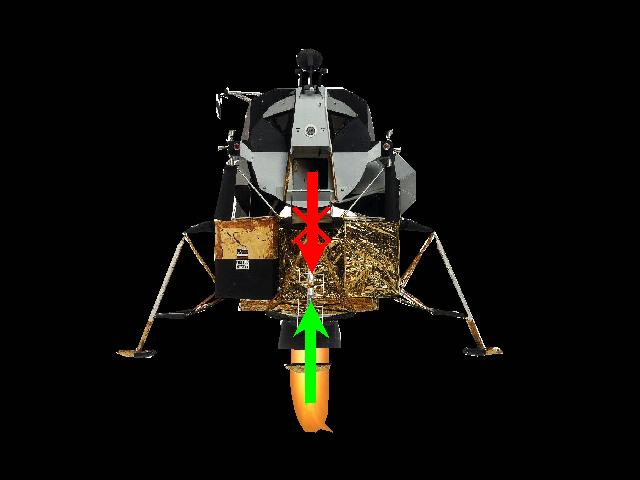 Lorsque la ligne de poussée est alignée avec le centre de masse du module lunaire, il n'y a pas de problčme, il est bien équilibré. |
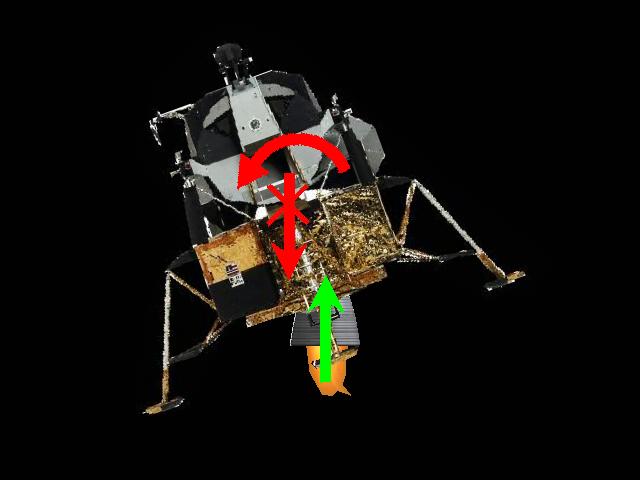 Mais, si le réacteur est pivoté de sorte que le centre de masse (représenté par une croix) est décalé en dehors de la ligne de poussée, le décalage du centre de masse relativement ŕ la ligne de poussée crée un torque qui tend ŕ faire tourner le module lunaire. Cette rotation doit ętre contrée. |
 En mettant ŕ feu des réacteurs latéraux, il est possible de créer un contre-torque dans le sens opposé pour contrer cette rotation. Si ces réacteurs latéraux pouvaient ętre ajustés de maničre ŕ créer un contre-torque exactement équivalent au torque créé par le torque de désalignement, le module lunaire pourrait rester parfaitement stable. |
 Mais le problčme avec ces récteurs latéraux est que, contrairement au réacteur principal, leur poussée ne pouvait pas ętre ajustée, ils fonctionnaient en "tout ou rien". Cela signifie que, lorsqu'ils étaient mis ŕ feu, ils créaient un contre-torque supérieur au torque de désalignement, avec le résultat que cela faisait tourner le module lunaire dans le sens opposé, au lieu de le maintenir stable. Cela signifie qu'ils ne pouvaient pas ętre mis ŕ feu de maničre permanente, mais alternativement. |
 Si les réacteurs latéraux avaient pu ętre commandés avec une fréquence suffisante, ils auraient pu maintenir le module lunaire assez stable. |
 Mais ce n'était pas le cas, var la période de guidage était assez lente. Cela signifie que les réacteurs latéraux ne pouvaient ętre commandés assez rapidement pour éviter un mouvement de balancier notable du module lunaire. Le module lunaire tournait dans le sens correspondant au décalage du centre de masse relativement ŕ la ligne de poussée (dans le sens inverse des aiguilles d'une montre lorsque le centre de masse était ŕ gauche de la ligne de poussée), puis les réacteurs latéraux étaient mis ŕ feu pour contrer cette rotation, et faisaient tourner le module lunaire dans l'autre sens, car leur torque était plus grand que le torque de désalignement, puis ils étaient éteints et le module lunaire se remettait ŕ tourner dans le sens inverse, et ainsi de suite... Ceci montre qu'il valait bien mieux garder le centre de masse aligné avec la ligne de poussée. |
 Ceci est ce qui arrivait pendant l'ascension du module de remontée retournant au module de commande ŕ la fin de la mission. Parce que, contrairement au réacteur du module de descente, celui du module de remontée ne pouvait pas pivoter, lorsque le centre de masse commençait ŕ se décaler relativement ŕ la ligne de poussée (parce que les réservoirs se vidaient), et que les réacteurs latéraux devaient ętre utilisés pour contrer le torque de désalignement, le module de remontée commençait ŕ montrer un mouvement de balancement qui devenait de plus en plus important ŕ mesure que le centre de masse se décalait de la ligne de poussée. |
 C'est de cette maničre que les ingénieurs de la NASA explique cette sinusoďde étrange que le module lunaire commence ŕ montrer sur la vidéo de remontée d'Apollo 17. Le seul problčme est que ce mouvement de balancement devrait apparaître progressivement alors qu'il apparaît ici de maničre brutale, et de plus le module lunaire change de direction brutalement alors que ce changement de direction devrait aussi ętre progressif. |
 Donc le module de descente, parce qu'il était capable de faire pivoter son réacteur, pouvait utiliser cette possibilité pour garder la ligne de poussée alignée avec le centre de masse, au fur et ŕ mesure qu'il se décalait (parce que les réservoirs du module se vidaient). |
La procédure initiale devient plus claire ŕ présent: Elle consistait ŕ orienter le réacteur de sorte que sa ligne de poussée soit sur le centre de masse, de sorte qu'il n'y ait pas de rotation lorsque le réacteur serait mis ŕ pleine poussée. Cette procédure n'est pas anormale, mais la question est: Pourquoi la faire maintenant? En effet, dans la documentation, ils disent qu'ils l'ont aussi faite lors de la séparation du module lunaire d'avec le module de commande. Alors pourquoi la faire ŕ nouveau, puisque le module lunaire n'utilise pas son réacteur lors de l'orbite de transfert? Et il ne devrait męme pas la faire lors de la séparation d'avec le module de commande, car le réacteur devrait ętre pré-ajusté de sorte que, avec les réservoirs pleins, la ligne de poussée soit alignée avec le centre de masse. |
 Les opérateurs sur terre disent aux astronautes comment orienter l'antenne aprčs une maneuvre du module lunaire. "Nous recommandons aprčs le mouvement de lacet que vous utilisiez les angles pour l'antenne S-Band: tangage moins 9, lacet plus 18" |
 Si les choses étaient bien faites, les angles d'orientation devraient changer automatiquement en accordance avec l'attitude du module lunaire, de sorte que l'antenne reste correctement orientée relativement ŕ la terre (la plateforme inertielle détecte les changements d'attitude du module). |
 Et, si l'antenne n'est pas correctement orientée vers la terre, comment se fait-il que le opérateurs sur terre peuvent communiquer aux astronautes les changements des angles de l'antenne, ce qui requiert que l'antenne soit correctement orientée vers la terre? |
 Et maintenant plus fűté: L'axe vertical de l'antenne S-Band était incliné ŕ 40° approximativement relativement ŕ l'axe vertical du module lunaire; le mouvement du module lunaire indiqué était seulement un mouvement de lacet, c'est ŕ dire autour de son axe vertical; cela veut dire que la correction de tangage de l'antenne devrait ętre seulement un peu inférieure ŕ celle de lacet (les 4/5 de celle-ci), mais, au lieu de cela, la correction de tangage annoncée par le sol n'était que la moitié de celle de lacet! |
 Ceci est un extrait de la vidéo de la descente motorisée du module lunaire. |
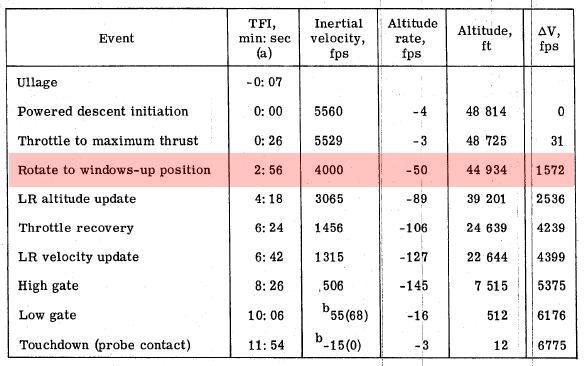 Cet extrait a lieu avant l'événement que j'ai coloré en rose dans la description de la descente motorisée. Vous voyez que, lors de cet événement, la vitesse horizontale est trčs importante (4000 pieds/s, environ 4400 km/h), mais la vitesse verticale est encore assez modérée (50 pieds/s, environ 54 km/h). L'altitude est alors de 44934 pieds, soit plus de 13 kilomčtres et demi: le module lunaire n'a pas encore perdu beaucoup d'altitude. |
Cela signifie que, au moment de cet extrait, le sol lunaire défile assez rapidement, mais les artefacts grossissent trčs peu. Pourtant, voyez le cratčre qui est au milieu de l'image au début de l'extrait, comme il grossit de maničre non naturelle, bien trop rapidement! La séquence que nous voyons est manifestement complčtement irréaliste. |
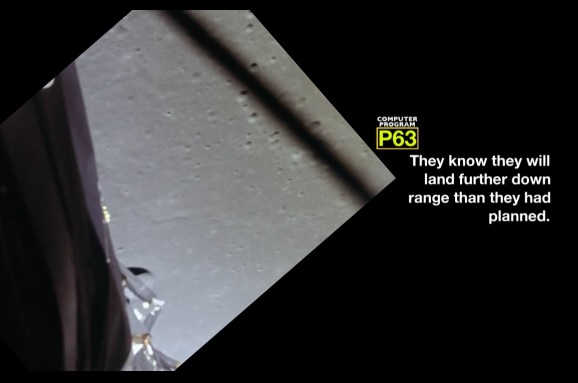 Puis ils disent ceci: "Ils réalisent qu'ils aluniront plus loin que ce qui était prévu". Normalement, c'est le programme de guidage qui décide comment le module lunaire doit alunir, et le guidage utilise des lois physiques, et n'a pas de raison de faire alunir le module lunaire plus loin que prévu. Ici, tout est prédéterminé et connu. Il ne peut pas y avoir d'événement inattendu, comme une rafale de vent sur terre. |
 A un moment, ils disent ceci: "Armstrong réalise que l'interrupteur rotatif du taux de rotation est sur le réglage bas, et il l'a donc mis sur le réglage haut". Ceci est absurde, Armstrong n'a pas ŕ faire ceci. La rotation est entičrement contrôlée par la guidage, qui la modifie continuellement pour l'adapter ŕ la trajectoire calculée. |
 A un moment de la descente, nous voyons le module lunaire faire une rotation brutale. C'est complčtement anormal, le module lunaire ne devrait jamais faire une telle maneuvre, c'est trčs dangereux, totalement contraire ŕ un guidage normal. Cette maneuvre viserait a permettre au radar de voir le sol lunaire. Mais c'est absurde, le module lunaire ne devrait pas avoir ŕ faire une telle maneuvre juste pour permettre au radar de voir le sol lunaire. Le radar devrait ętre conçu pour ętre capable de voir le sol lunaire tout au long de la descente, quelle que soit l'attitude du module lunaire. |
 Lorsqu'une station radar désire pointer une cible, elle ne fait tourner que la parabole... |
 ..Elle ne fait pas tourner tout le socle avec! |
 Pendant la rotation brutale du module lunaire (pour permettre au rdar de voir le sol lunaire), ils disent ceci: "Alors que le vaisseau tourne, le changement des angles de l'antenne provoquent des interruptions répétées de la réception du radar". A voir comme le module lunaire tourne, c'est plutôt une interruption prolongée qu'il devrait y avoir. |
 Ceci est l'explication qu'ils donnent pour la maneuvre qui permet au radar de voir la surface lunaire: "Ils veulent avoir le Delta-H, lequel compare les valeurs du radar et de l'ordinateur pour la hauteur". Le Delta-H est la différence de hauteur entre la hauteur initiale et la hauteur courante. Le radar donne une valeur mesurée pour ce Delta-H (différence entre l'altitude initiale et l'altitude donnée par le radar), et le guidage calcule une valeur estimée pour ce Delta-H, et le Delta-H n'est pas la différence entre ces deux valeurs. Et, męme en supposant que le Delta-H représente effectivement la différence entre la hauteur mesurée par le radar et la hauteur calculée par le guidage, pourquoi vérifieraient-ils quelque chose qui est automatiquement mis ŕ jour par le guidage? Parce qu'ils craignent que l'ordinateur déconne? Le problčme est que, sur cet ordinateur primitif, ils ne peuvent obtenir toutes les valeurs du guidage en męme temps, mais sépararément une ŕ la fois (avec un programme pour chacune); cela signifie qu'ils vont comparer des valeurs qui ne sont pas synchrones entre elles, et donc leur différence ne sera pas significative. Un bon gag de la part des ingénieurs de la NASA. |
 Puis les astronautes voient apparaître une alarme 1202 sur l'affichage de l'ordinateur... |
 Et ils se demandent ce que cette alarme pouvait bien ętre, car ils n'ont pas été informés que cette alarme pouvait se produire. |
 La vidéo donne l'explication de cette alarme: L'ordinateur ne peut pas terminer ses tâches ŕ l'intérieur du cycle de deux secondes. Cela demande une explication. |
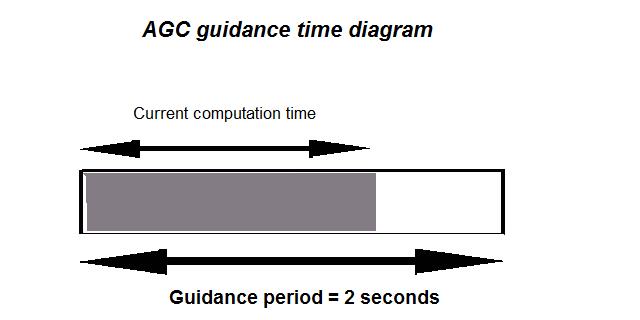 L'AGC réalisait périodiquement sa tâche de guidage durant une fenętre de temps qui avait été fixée ŕ 2 secondes. Cela signifie qu'il devait absolument terminer la tâche de guidage courante avant la limite des deux secondes, sinon la tâche périodique de guidage suivante ne pourrait débuter parce que la précédente n'avait pas fini ŕ temps. Si cela se produisait trop souvent, cela se terminait par un blocage de l'ordinateur, et nécessitait un redémarrage de l'ordinateur, ce qui était annoncé par la fameuse alarme 1202. Normalement, il n'y aurait pas de raison que l'ordinateur ne termine pas â temps sa tâche de guidage. |
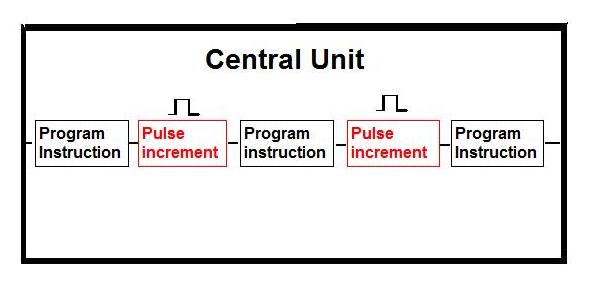 Mais le systčme de guidage travaillait avec des impulsions matérielles venant de la plateforme inertielle, et aussi du radar, lesquelles devaient ętre comptées; au lieu de les compter normalement, comme le font les autres systčmes de guidage, les ingénieurs de la NASA avaient imaginé de les faire compter par le processeur lui-męme avec ce qu'ils appelaient des "instructions non programmées", c'est ŕ dire des instructions qui n'étaient pas dans le programme de guidage, mais qui s'exécutaient automatiquement ŕ chaque impulsion. Le problčme est que ces instructions bizarres volaient des temps de cycle au processeur, et érodaient sa puissance, qui n'était pourtant déjŕ pas trčs importante (c'est le moins qu'on puisse dire). |
 Le résultat est que le temps de calcul de la tâche de guidage, au lieu d'ętre stable, flottait ŕ cause des impulsions matérielles que le processeur devait compter lui-męme. Si le processeur pouvait quand męme terminer son traitement ŕ temps, ce serait un moindre mal... |
 Mais il pouvait arriver qu'il y ait des parasites sur une entrée envoyant des impulsions; et dans ce cas l'ordinateur comptait plus d'impulsions qu'il n'aurait du, avec le résultat que son temps de calcul s'en trouvait d'autant augmenté, et qu'il pouvait alors dépasser la limite fatale des deux secondes. Cela signifie que les ingénieurs de la NASA, avec cette invention délirante de faire compter les impulsions matérielles par le processeur lui-męme, avaient créé une situation qui pouvait causer une panne de l'ordinateur par la présence de parasites sur une entrée. |
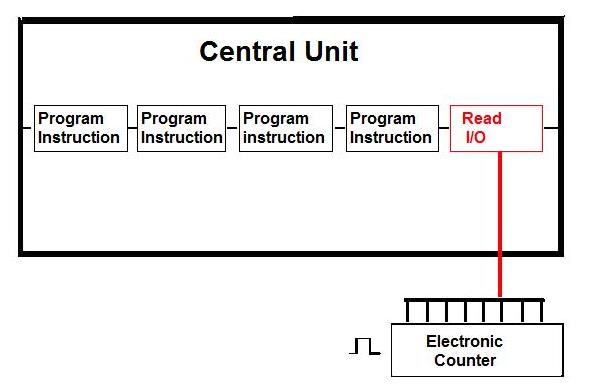 Mais cela doit ętre vu comme un GAG de la part des ingénieurs de la NASA, parce que ce n'est JAMAIS fait de cette maničre. JAMAIS un processeur n'a compté lui-męme des impulsions matérielles. Les impulsions métérielles sont TOUJOURS comptées par des compteurs électroniques extérieurs au processeur, et le processeur se contente de lire les comptes de pulses sur ces compteurs ŕ chaque fois qu'il en a besoin (en utilisant une instruction IO, et le processeur de l'AGC avait une telle instruction). Si les choses avaient été faites normalement, le temps de calcul de la tâche de guidage serait resté raisonnablement stable, et l'ordinateur aurait toujours pu terminer sa tâche de guidage ŕ temps; de plus, lorsqu'il y aurait eu des parasites, l'ordinateur aurait pu les traiter correctement. L'alarme 1202 n'aurait pas eu de raison d'exister. |
 Cela signifie que l'alarme 1202 doit ętre vue comme une belle plaisanterie de la part des ingénieurs de la NASA, qui n'ont jamais eu l'intention de concevoir un systčme sérieux dont ils savaient trčs bien qu'il ne permettrait jamais ŕ un module lunaire de se poser sur la lune. |
 Les astronautes avaient reçu un entrainement intense...Mais les ingénieurs avaient oublié des leur expliquer les alarmes possibles. C'était l'épice de l'aventure. |
 Puis la vidéo dit ceci: "Armstrong décide d'incorporer les données du radar dans les équations de guidage". Oh vraiment? Mais ce n'est pas ŕ lui de prendre cette décision, cela doit ętre fait AUTOMATIQUEMENT!!! |
 Puis les ingénieurs font ŕ nouveau preuve d'humour en disant ceci: "L'ordinateur rentre graduellement les données du radar dans ses sommes, permettant au Delta-H de se réduire progressivement." Pourquoi est-ce drôle? Parce que le Delta-H mesure la différence de hauteur entre deux évenements, et le fait de prendre en compte la donnée radar ne va pas la changer, juste l'affiner. un gag. |
 Puis ils disent ceci: "Les angles LPD changent trčs rapidement alors que le clapotement du carburant affecte le contrôle de l'attitude et interfčre avec le cycle de contrôle de 2 secondes de l'ordinateur." Ceci est complčtement absurde, le mouvement du module lunaire est souple et régulier, et le carburant n'a pas de raison du tout de clapoter, et il ne pourrait certainement pas affecter le contrôle d'attitude. Un nouveau gag de la part des ingénieurs. |
 Puis la vidéo dit que, lorsqu'Armstrong prend les commandes, il penche immédiatement le module vers l'avant "pour maintenir la vitesse au sol". C'est hilarant, ils parlent comme si Armstrong pilotait un avion dans l'atmosphčre terrestre, et non un vaisseau spatial dans le vide lunaire. Armstrong n'a pas besoin de pencher le module lunaire en avant pour maintenir la vitesse horizontale, car, sur la lune, il n'y a pas pas d'air pour ralentir le module lunaire, et conséquemment il va conserver sa vitesse horizontale tant qu'une force contraire ne la contrarie pas. Si Armstrong fait cette maneuvre, il ne va pas maintenir la vitesse horizontale, mais l'accroître au contraire. |
 C'est d'autant plus illogique qu'il penche plus tard le module lunaire en arričre pour décroître la vitesse horizontale. Pourquoi accroître la vitesse horizontale si c'est pour la décroître plus tard? Juste pour gaspiller le précieux carburant dont il va bientôt ętre ŕ court? |
 Et, au moment oů les astronautes en ont le plus besoin, le radar décide de tomber en panne! |
 Ils disent: "Des tourbillons de poussičre étaient projetés depuis le petit cratčre de l'ouest". et: "Une couche substantielle de poussičre est soulevée par l'échappement du réacteur". Mais ce ne sont pas des tourbillons de poussičre, ce que l'on voit est trop régulier est rectiligne pour ętre des tourbillons de poussičre. |
 Il est tout ŕ fait manifeste que ce que nous voyons ici ressemble plutôt ŕ un balayage de faisceaux lumineux. |
| Ce que nous voyons est trčs manifestement quelque chose qui ne pourrait arriver que dans l'atmosphčre terrestre, et non le vide lunaire, et de plus requiert des sources lumineuses cachées. |
 Normalement, juste avant de se poser sur la lune, le module lunaire devrait ętre parfaitement stationnaire relativement ŕ la surface lunaire, et descendre verticalement. |
 En effet, le module lunaire ne peut se permettre de se poser avec une vitesse latérale. Il n'avait pas de roues, et le sol lunaire n'est pas plat, il peut y avoir des roches, et de petits cratčres ŕ l'endroit oů il se pose, qui pourraient causer son renversement s'il se posait avec une vitesse latérale. |
 Pourtant regardez ce qui se passe avant que le module lunaire finisse par se poser; observez les artéfacts sur le sol (les petites pierres que nous voyons), ils bougent constamment...Et ils ne bougent męme pas dans une direction unique, mais męme dans plusieurs directions. |
 Cela signifie que, loin de descendre verticalement, et d'ętre stationnaire relativement ŕ la surface lunaire, le module lunaire alunit en ZigZag. |
 Et, s'il alunit de cette maničre, il est presque sűr de se renverser en touchant le sol. |
 J'étais sűr qu'ils cacheraient un indice dans "l'ombre" du module lunaire (ou ce qui est supposé ętre son ombre, car je suis convaincu que ce n'est pas vraiment son ombre) juste avant qu'il ne se pose. Je l'ai facilement trouvé, et je montre l'extrait dans lequel il arrive. Voyez le bas du module, il change soudainement, et cela ne dure qu'une fraction de seconde, car immédiatement aprčs il redevient comme il était avant. Et vous remarquerez aussi que, pendant cette fraction de seconde, le sol lunaire devient soudainement plus clair. |
 Je montre cet extrait ralenti, de maničre que vous puissiez mieux voir. |
 Et j'en montre męme un gros plan. Etrange, n'est-ce pas? |
 Lorsque le module lunaire est posé sur le sol lunaire, nous voyons son ombre projetée sur le sol lunaire. Il est intéressant de la comparer avec un modčle correct du module lunaire. |
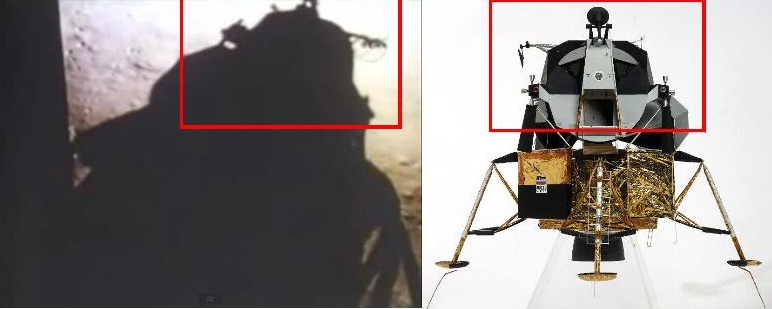 Ce qui est intéressant ŕ comparer est le sommet du module lunaire, et en particulier les antennes. |
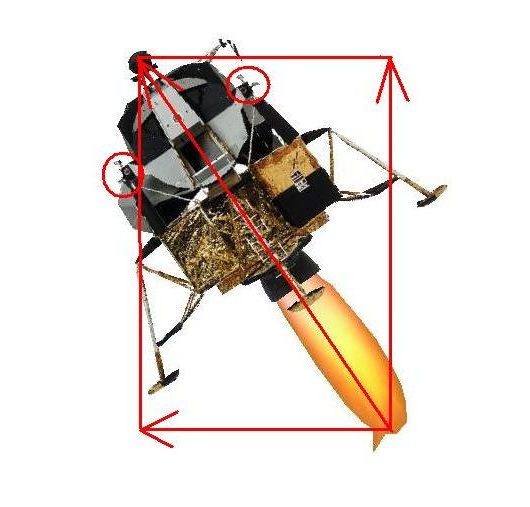
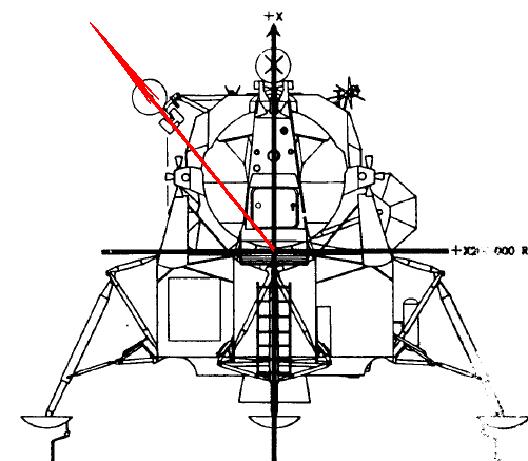
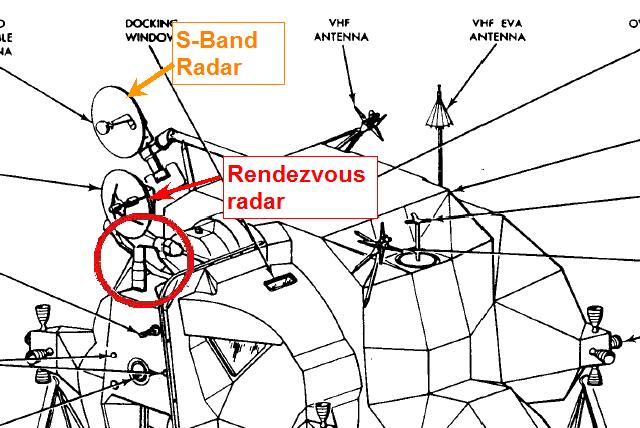 Je montre ici le sommet du module lunaire tel que représenté sur un schéma du module lunaire dans son manuel technique. J'indique le radar de rendez-vous (en rouge), qui était placé sur le devant du module lunaire, et l'antenne S-Band (en orange), qui était placée sur le côté du module lunaire. J'ai cerclé la partie inférieure de l'antenne de rendez-vous, car c'est la seule partie de cette antenne que nous pouvons voir sur l'ombre. C'est encore assez pour connaître l'orientation de cette antenne sur l'ombre. |
 Cette animation que j'ai faite ŕ partir du schéma dans le manuel du module lunaire montre comment l'antenne de rendez-vous bougeait; elle n'est pas parfaite, car, pour la faire plus parfaitement, j'aurais eu besoin de plusieurs vues de cette antenne, alors que j'en ai utilisé une seule (celle du schéma), mais elle remplit complčtement son but de montrer comment cette antenne bougeait. |
 Sur cette vue stéréoscopique, je montre l'antenne de rendez-vous et l'antenne S-band, ŕ la fois sur l'ombre du module et sur son modčle (qui est une réplique exacte). Nous ne voyons que la partie inférieure de l'antenne de rendez-vous sur l'ombre, mais cette partie est suffisante pour savoir comment elle est orientée. |
 Maintenant, regardez: A la maničre dont l'antenne de rendez-vous apparaît sur l'ombre du module, nous pouvons voir qu'elle est orientée suivant la flčche que j'ai dessinée en rouge...Et l'ombre de l'antenne S-Band est orientée suivant la flčche que j'ai dessinée en orange. Ces deux flčches devraient avoir des directions perpendiculaires, puisque l'antenne S-band est placée sur le côté du module lunaire, mais elles ont des directions parallčles au lieu de cela! |
 Tous ces événements ont profondément troublé Buzz Alrdrin, car il grossit trčs nettement entre deux photos lorsqu'il sort du sas du module lunaire. |
 Sérieusement, il serait temps que vous ouvriez vos yeux et voyiez la plaisanterie que c'est! Je vous ai montré que cette descente n'était rien d'autre qu'une succession de gags et d'absurdités. |
 Mon avis est que, si Apollo s'est vraiment posé sur la lune, cela ne pouvait ętre qu'avec l'intervention divine. Mais Dieu est capable de tout, n'est ce pas? |

