THE STRANGE DESCENT OF APOLLO 11

 People often assume that the lunar module started its powered descent (i.e. using its engine for the descent) as soon as it left the command module. But the altitude that the command module was flying at was not the ideal attitude to start the powered descent; the ideal attitude was much lower. So, the solution which has been chosen has been to make the lunar module join the orbit which had this ideal attitude by making the lunar module follow a transfer orbit, that is an orbit of which its distance to the lunar surface varies along its trajectory. This transfet orbit: - Must touch the command module's orbit on one end. - Must touch the orbit with the ideal altitude on the other end. - And must have as one of his foci the moon's center, so that the lunar module can naturally follow it without using its engine, and so it can have the totality of its fuel (or almost) when it starts the powered descent from the closer orbit. The NASA engineers have decided that the desired altitude of the lower orbit for starting the powered descent would be set to 48814 feet, which makes 14878 in meters (near 15 kilometers, so much lower than the CM's altitude which was around 110km). This allows to completely define the transfer orbit, since its two ends are known. Kepler's law allows to compute the orbital speed of the command module at the contact point, and the one of the transfer orbit. At the contact point: - The orbital speed of the command module was equal to 1622.66 m/s - The orbital speed of a satellite following the transfer orbit was equal to 1599.95 m/s. That makes a difference of 22.71m/s, which expressed in feet/s gives 75.7 feet/s. This is the difference of speed that the lunar module must reduce of so that it can place itself on the desired transfer orbit. In the documentation, they say that this difference of speed is around 75 feet/s; so you can see that my estimation is quite good, in fact more precise. Why do I need to be so precise? Because a difference of one foot/s in the difference of speed results in a variation of altitude of 1250m at the other end of the transfer orbit; so you see the importance for the variation of speed to be adjusted very precisely. Just to give you an idea, if the reduction of speed was 85 feet/s instead of 75m/s, the lunar module would arrive at the level of the lunar surface at the other end of the transfer orbit. You might think that, when it arrives on the lower orbit, the lunar module has to increase its speed to place itself on this orbit, but it is the contrary, it has again to reduce its speed of almost the same quantity, for its speed naturally increases a little along the transfer orbit. |
 Now, in the documentation, they say that the initial maneuver of speed reduction (to place the lunar module on the transfer orbit) is done in three steps: 1) applying 10% of the maximal thrust for 15 seconds. 2) Applying 40% of the maximal thrust for 13 seconds. 3) making a final reduction of 12 feet/s during 3 seconds. If we call Am the maximal deceleration obtained when the engine throttles at maximum, the total decrement of speed can be expressed by this formula: Total speed decrement= Am*(15*0.10)+Am*(13*0.40)+12=Am*6.7+12 |
 Now, do we have a way to know Am? Yes, we have thanks to the specifications of the LM: - According to NASA, the LM had a total mass equal to 15200kg, for the H-Series (the one of the first missions). - The LM's engine had a force of 43900 Newtons, according to NASA So, the LM's engine, with full tanks and maximal thrust, could give an acceleration: Am=43900/15200=2.888 m/s�=9.627 feet/s� |
 So, now we can calculate the (minimal) initial decrement of speed caused by the thrust of the engine: Speed decrement=9.627*6.7+12=76.5 feet/s You'll say that it does not make much difference with the reduction of speed which must be applied, but a variation of one foot/s in the reduction of speed makes a variation of altitude of 1250 meters at the other end of the orbit, and this variation might make the powered descent fail. Here we have a difference of 1.5 foot/s with the difference of speed they say in the documentation, and 0.8 foot/s with the difference of speed I have myself calculated. But even 0.8 foot/s of difference represents a variation of one kilometer of altitude at the other end of the orbit, and one kilometer above the lunar surface, in the described powered descent, the lunar module still had horizontal and vertical speeds which were far from being negligible, and which would have prevented the lunar module from landing. The final overburn makes the LM lose 12 feet/s in 3 seconds; with the maximum thrust, the LM would lose 12 feet/s in: 12/9.627=1.246s. It means that to reduce the speed of 12 feet/s in 3 seconds, the LM applied a fraction of the thrust equal to 1.246/3=0.41, so 41%, almost the same as in the second step. Now, why does the way the speed of the LM is decreased make no sense? Because it starts with a low throttle (10% of maximal thrust) and ends with a more important throttle (40% of maximal thrust); With 40% on the maximal thrust, the lunar module loses 4 feet/s in one second, and with 10% of the thrust, it loses 1 foot/s in one second; it is obvious that it would have been better to finish the speed reduction with 10% rather than 40% so to adjust as precisely as possible this speed reduction, since the precision of this speed reduction has so much impact on the altitude at the other end of the tranfer orbit. |
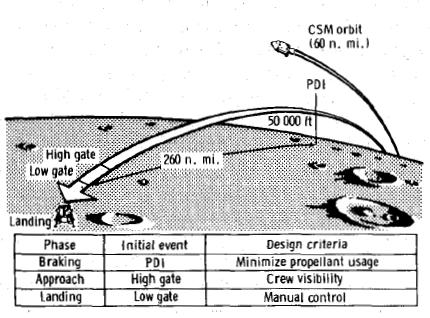 Once that the lunar module has reached the lower orbit, it effectively starts the powered descent, i.e. using its engine to descend to the moon. The landing procedure is done in several phases, starting with a braking phase which allows the lunar module to lose most of its important horizontal velocity. The lunar module indeed has a very important initial horizontal velocity relatively to the moon of almost 6000km/h that it must absolutely lose before landing; Imagine what would happen if it was landing with a such velocity: It would be literally pulverized! |
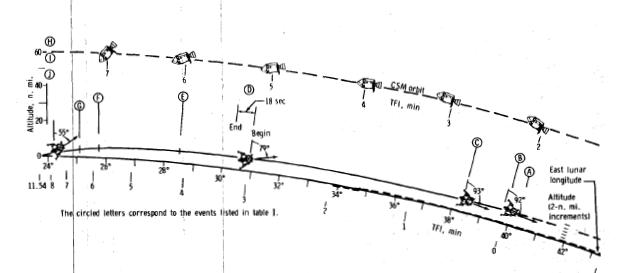 During the initial phase, the LM is oriented horizontally, because it must use the thrust of its engine to counter the horizontal velocity and make it decrease. Initially, the centrifugal force allows to counter the lunar attraction which means that it does not need to be countered. Progressively, as the LM loses its horizontal velocity, the centrifugal force decreases, which means that the lunar attraction tends to more and more attract the lunar module toward the moon and make the vertical speed increase. But, during the initial braking phase, the vertical velocity remains small relatively to the important horizontal velocity, and represents only a hundredth of the horizontal velocity, or around it. So, in this phase, the lunar module ignores the lunar attraction and consecrates the thrust of its engine essentially to decrease the important horizontal velocity, which means that it remains horizontal. After this phase, it starts turning to vertical, in order to start countering the lunar attraction before the vertical velocity becomes too important, moderately at first, then more and more as the horizontal velocity becomes smaller and smaller, to end up completely vertical at the end. |
 The attitude of the lunar module is very important, for this attitude allows to distribute the main thrust on the two axes; the vertical component of the thrust allows to control the vertical speed, and the horizontal component allows to control the horizontal speed. It means that, all along the descent, the lunar module is oriented along the trajectory it follows, for it is its attitude which allows to control the descent. The change of attitude of the lunar module is very progressive, from a horizontal attitude at the beginning of the powered descent to a vertical attitude at its end, and it must never be brutal. Till then, the explanations have been a little theoretical, and may be not very easy to understand for some people, but what follows will be easier to understand. |
 In a video, they alternately show us the lunar module as seen from the command module, and the command module as seen from the command module. I have put the two animations side to side, so we can better see the problems with them. You can see that the command module turns in reverse direction from the one of the lunar module, which is totally normal, and also that the lunar ground moves in opposite directions on the two animations, which is also normal. But: - The command module turns less than the lunar module, whereas it should turn the same. - The command module grows instead of shrinking like the lunar module does. - And the lunar ground we see shift under the command module and the lunar module is obviously not the same: Indeed, we see under the lunar module a blob bigger than the other ones, and which is shaped as a horse shoe, and that we don't see under the command module. |
 Then, there is a photo of Apollo 11 (AS11-37-5445), taken from the lunar module, which shows the lunar ground behind the command module; it means that the lunar module is not under, but above the command module. Yet, it is not the command module which is supposed to descend to the moon, but the lunar module. |
 Some say that it is just a separation maneuver illustrated in this animation... |
 ...But the lunar module didn't need to separate in this way, it was much simpler and more logical to separate as this animation shows it. |
 And even if the NASA engineers had decided to make the separation in this strange illogical way, it still does not explain why the command module would need to be so far under the lunar module. |
 For...  ...It makes no doubt that it is the command module that we see so far under the lunar module, closer to the moon! |
 So, there is clearly something abnormal here...unless the engineers would have decided to make the command module land on the moon instead of the lunar module! |
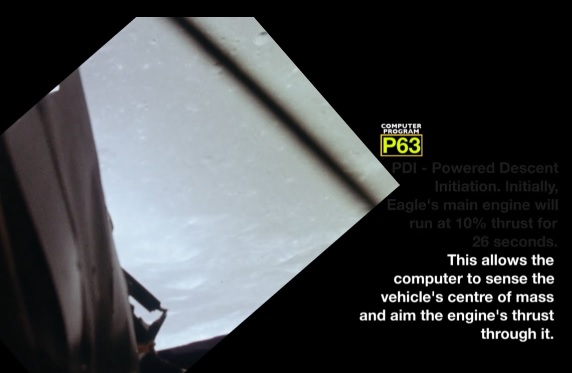 The powered descent begins in throttling only at 10% of the maximal thrust, and they explain why in this comment: "This is to allow the computer to sense the vehicle's center of mass and aim the engine's thrust through it". This requires an explanation. |
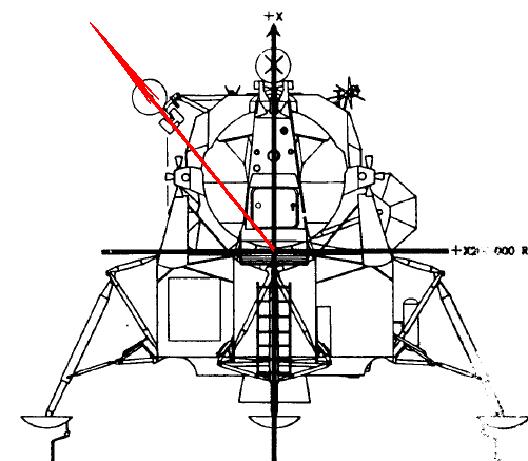
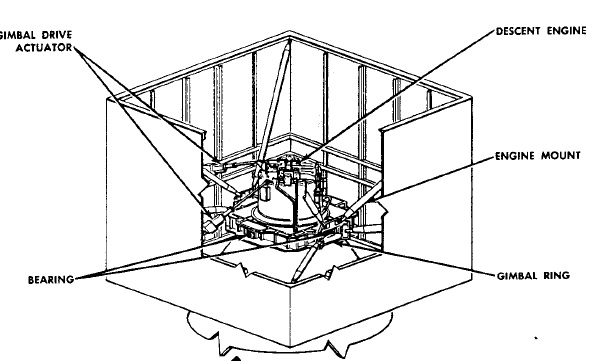 The lunar module could swivel its engine up to 6 degrees. |
 Some think that this possibility of swivelling the engine was allowing the lunar module to bend relatively to its engine and to allow the astronauts to view the lunar surface. But in fact it was not for this reason that the engine could swivel. |
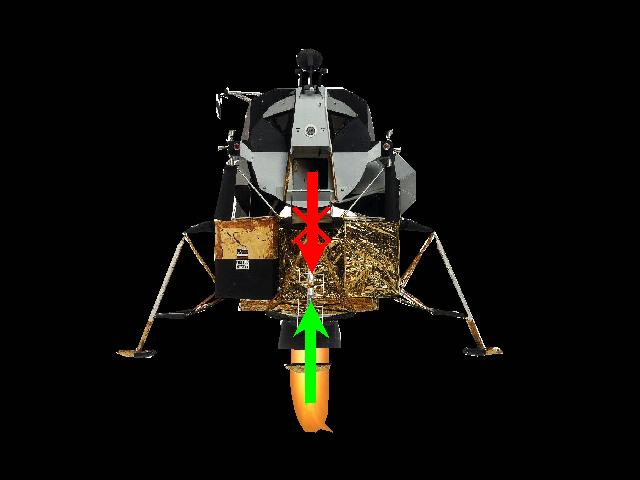 When the line of thrust is aligned with the center of mass of the lunar module, there is no problem, the module is well balanced. |
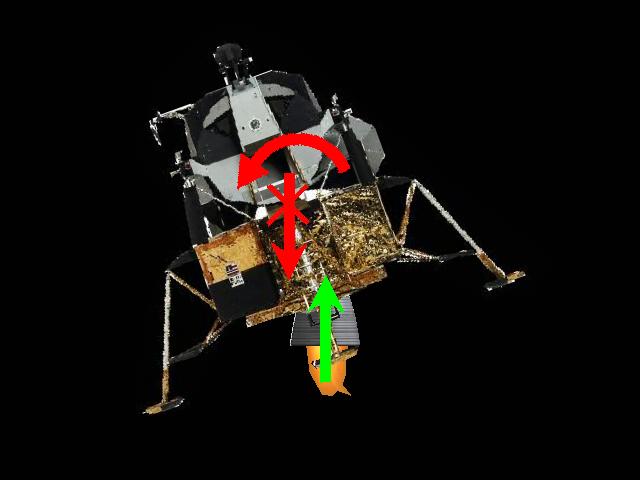 But, if the engine is swivelled so that the center of mass (represented by a cross) is shifted out of the line of thrust, the shift of the center of mass relatively to the line of thust creates a torque which tends to make the lunar module turn. This rotation needs to be countered. |
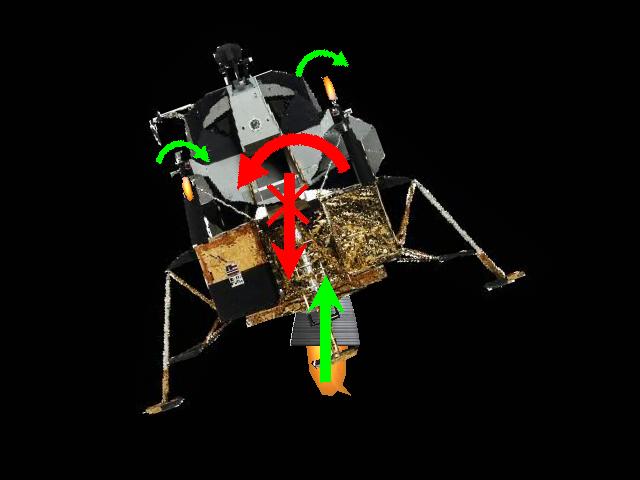 By firing thrusters of the RCS, it is possible to create a counter-torque in the opposite direction to counter this rotation. If these thrusters could be adjusted to create a counter-torque exactly equivalent to the torque created by the shift of the center of mass, the lunar module could remain perfectly stable. |
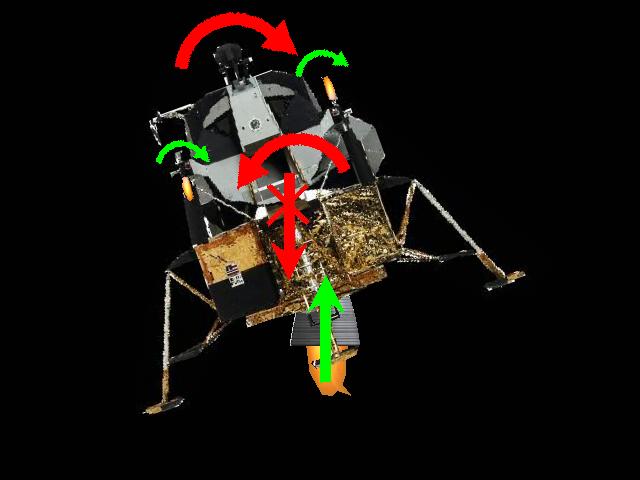 But the problem with these lateral thrusters is that, unlike the main engine of the lunar module, their thrust could not be adjusted, they were working in "all or nothing". This means that, when they were fired, they were creating a counter-torque greater than the torque created by the shift of the center of mass, with the result that it was making the lunar module turn the other way, instead of maintaining it stable. This means that they could not be permanently fired, but ony alternately. |
 If the lateral thrusters could have been commanded with a sufficient frequency, they could have maintained the lunar module quite stable. |
 But this was not the case, for the guidance period of the lunar module was quite slow. This means that the lateral thrusters could not be commanded fast enough to avoid a notable swaying move of the lunar module. The lunar module was turning in the direction corresponding to the shift of the center of mass relatively to the line of thrust (counter-clockwise if the center of mass was shifted left relatively to the line of thrust), then the lateral thursters were fired to counter this rotation, and were making the lunar module turn the other way, for their torque was greater than the disalignment torque, then they were shut off, and the lunar module was turning counter-clockwise again, and so on.... This shows that it was much better to keep the center of mass aligned with the center of mass. |
 This is what was happening during the ascent of the ascent module returning to the command module at the end of the mission. Because, unlike the descent engine, the ascent engine could not be swivelled, when the center of mass was beginning to shift relatively to the line of thrust (because the propellant tanks were emptying), and that the lateral engines had to be used to counter the disalignment torque, the ascent module was starting to show a swaying move which was becoming more and more consistent as the center of mass was more and more shifting from the line of thrust. |
 That's how the NASA engineers explain this strange sinusoid that the lunar module starts to make on the video of the ascent in Apollo 17. The only problem is that this swaying move should appear progressively whereas here it appears in a brutal way, and moreover the lunar module changes very brutally its direction whereas this change of direction should also be progressive. |
 So, the descent module, because it was able to swivel its engine, could use this possibility to keep the line of thrust aligned with the center of mass, as this one was slowly shifting (because the propellant tanks were emptying). |
So the initial procedure is becoming more clear now: It was consisting in orienting the engine so that its line of thrust would be aligned with the center of mass, so that no rotation torque would be created when the engine would start to throttle at maximum thrust. This procedure is not abnormal, but the question is: why to make it now? Indeed, the documentation says that they also made this procedure when the lunar module separated from the command module. So, why to make it again, since the lunar module did not use its engine along the transfer orbit? And, it should not even have had to make it when separating from the command module, for the engine should have been pre-adjusted so that, with its tanks full, the engine was aligned with the center of mass. |
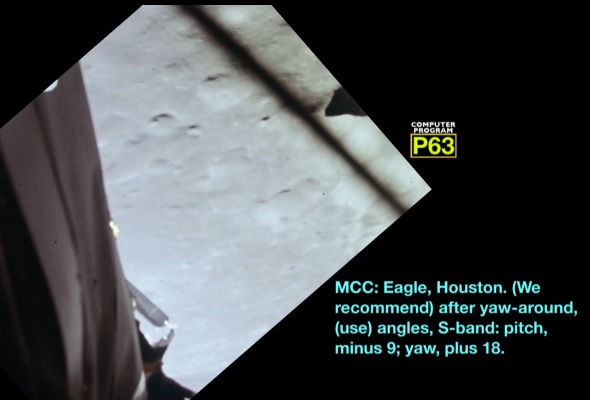 The operators on earth tell the astronaut how to orient the antenna after a maneuver of the lunar module. "We recommend, after yaw-around, you use angles, S-band: pitch minus 9; yaw, plus 18." |
 If things were normally done, the orientation angles should automatically change accordingly with the LM's sttitude, so that the antenna remains correctly oriented relatively to the earth (the inertial platform detects all the attitude changes of the LM). |
 And, if the antenna is not correctly oriented toward the earth, how is it that the operators on earth can communicate to the astronauts the angle changes of the antenna, which requires the antenna to be correctly oriented toward the earth? |
 And now a little bit smarter: The vertical axis of the S-Band antenna was inclined at approximately 40� relatively to the vertical axis of the lunar module; the move of the lunar module has been indicated as a yaw move, i.e. a move around the vertical axis of the lunar module; this means that the pitch correction of the antenna should only be a little smaller than the yaw one (the 4/5 of this one); instead of this, the pitch correction advised by the ground was only half of the yaw one! |
 This is an excerpt of the video of the powered descent of the lunar module. |
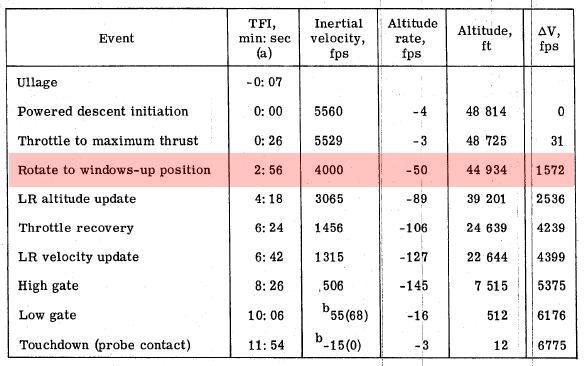 This excerpt happens before the event I have colored in pink in the powered descent summary. You can see that, at this event, the horizontal speed is very important (4000 feet/s, around 4400km/h), but the vertical speed is still quite moderate (50 feet/s, around 54 km/h). The altitude is then 44934 feet, so more than 13 kilometers and a half; the lunar module has not lost much altitude yet. |
It means that, at the moment of this excerpt, the lunar ground shifts quite fast, but the artefacts we see grow very little. Yet, see the crater which is on the middle of the image at the start of the excerpt, how it unnaturally grows fast, much too fast! This sequence we see is very obviously totally unrealistic. |
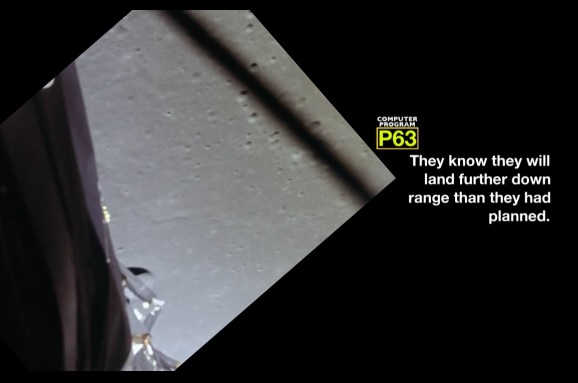 Then they say this: "They know they will land further down range than they had planned". Normally, this is the guidance which decides how the lunar module must land, and the guidance use physical laws to work, and it has no reason to make the lunar module land farther than planned. Here everything is predetermined, and known. There is no unexpected event which can change the data, no wind like it could happen on earth. |
 At one moment, they say this: "Armstrong realizes the rate of rotation switch is at Low Setting, so he switched to high rate". This is preposterous, Armstrong does not have to do that. The rotation must entirely be controlled by the guidance, which continuously changes it to adapt it to the computed trajectory. |
 At one moment of the descent, we see the lunar module make a very brutal rotation. This is totally abnormal, the lunar module should never make this type of maneuver, it is very dangerous, totally contrary to a normal guidance. This would be to allow the radar to see the lunar ground. But this is preposterous, the lunar module should not have to do this kind of maneuver just to allow the radar to see the lunar ground. The radar should be conceived to be able to see the lunar ground whatever the attitude of the lunar module during the descent. |
 When a radar station want to point at a target, it just makes the dish turn... |
 ...It does not make the full support turn too. |
 During the brutal rotation that the lunar module makes (to allow the radar to see the lunar surface), they say this: "As the spacecraft rotates, the changing antenna angles cause repeated droupout of the radar reception". Seeing how the lunar module rotates, it is not just repeated dropout that there should have, but a prolonged one instead. |
 This is the explanation they give to make the maneuver to allow the radar to see the lunar surface: "They want Delta-H, which compares the radar's and computer's value for height." The radar gives a measured value for this Delta-H (difference between the initial altitude and the altitude given by the radar), and the guidance computes an estimated value for this Delta-H, and the Delta-H is not the difference between these two values. And, even supposing that the Delta-H effectively represents the difference between the height measured by the radar and the height calculated by the guidance, why would they check something which is automatically updated by the computer? Because they are afraid that the computer would screw? The problem is that, on this primitive computer, they can't get all the guidance values in the same time, but separately, one at a time (with a program for each); it means that they are going to compare values which are not synchronous with each other, so their difference will not be significant. A good joke from the NASA engineers. |
 Then the astronauts see a 1202 alarm appear on the computer's display... |
 And they wonder what this alarm could be, for they have not even been informed that this alarm could happen. |
 The video gives the explanation of this alarm: The computer cannot finish its tasks within each 2-second cycle. This needs an explanation. |
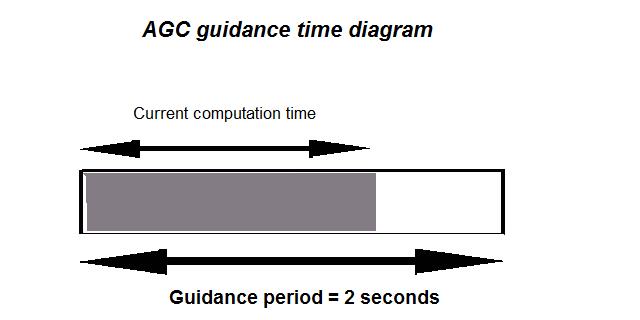 The AGC was periodically performing its guidance task during a time window which had been fixed at 2 seconds. This means that it absolutely had to finish the current guidance task before the limit of two seconds, otherwise the next guidance periodical task could not start because the previous one had not finished in time. If this was happening too often, it was ending in blocking the computer, and needing a restart of the computer, which was announced by the famous 1202 alarm. Normally, there would have been no reason for the computer not to finish the guidance task in time. |
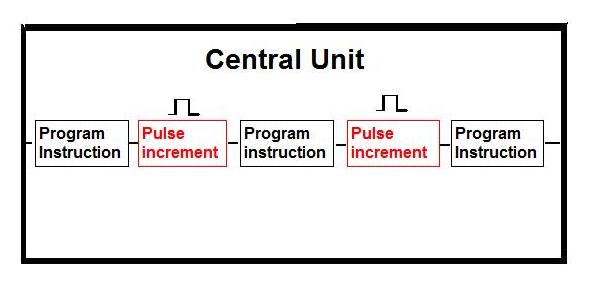 But the guidance system was working with hardware pulses coming from the guidance inertial platform, and also from the radar which needed to be counted; instead of counting them normally, as all other guidance systems do, the NASA engineers had imagined to make the processor count itself the hardware pulses with what they were calling "unprogrammed instructions", that is instructions which were not in the guidance program, and which were automatically executing at each pulse. The problem is that these weird instructions were stealing time cycles from the processor, and eroding its power, which yet was not very important (that's the least to say). |
 The result is that the computation time of the guidance task, instead of being quite stable, was floating instead because of the hardware pulses that the processor had to count itself. If the processor could still have finished the guidance task in time, it might no have been so much a problem... |
 But it might happen that there were parasites on an input which was sending pulses, and it that case the computer was counting more pulses than it should have, with the result that the computation time of a guidance task could incidently go over the limit of 2 seconds. This means that the NASA engineers, with this weird invention of making the processor count itself hardware pulses, had created a situation which could make the computer jam by the presence of parasites on an input. |
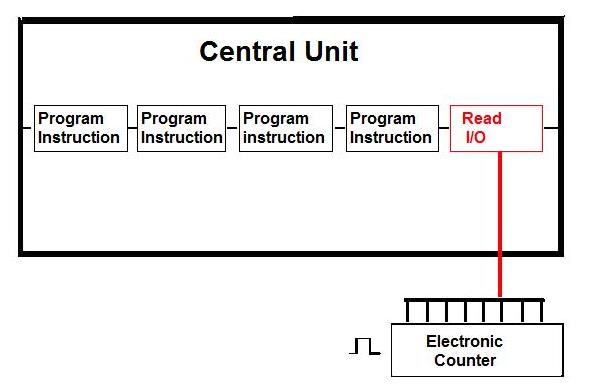 But this must be seen as JOKE from the NASA engineers, for it is NEVER made this way. NEVER does a processor count itself hardware pulses. Hardware pulses are ALWAYS counted by electronic counters which are external to the processor, and the processor just reads the counts of pullses on these counters whenever it needs to use them (by using an IO instruction, and the processor of the AGC had a such instruction). If things had been normally done, the computation time of the guidance task would have been quite stable, and the computer could always have finished the guidance task in time; moreoever, when there would have been parasites, the computer could have correctly handled them. The 1202 alarm would then have had no reason to exist. |
 This means that the 1202 alarm has to be seen as a big joke from the NASA engineers, who never intended to make a serious system that they knew that it would never allow a lunar module to land on the moon. |
 The astronauts have received a very serious training...But the engineers have forgotten to explain them the possible alarms. That is the spice of adventure! |
 Then the video says this: "Armstrong decides to "incorporate" the radar data into the guidance equations" Oh really? But it is not up to him to decide that, it must be done AUTOMATICALLY!!! |
 Then the engineers show humor again, by saying this: "The computer gradually brings the radar data into its sums, causing Delta-H to slowly reduce". Why is this funny? Because the Delta-H is a difference of height (between two events), and the fact of taking the radar data into account is not going to change it. |
 Then they say this: "LPD angles change rapidly as propellant slosh affects attitude control and interferes with the computer's 2-second control cycle". It is completely absurd, the move of the lunar module is smooth and regular, the propellant has no reason at all to slosh, and it could certainly not affect the attitude control! A new joke from the engineers. |
 Then the video says that, when Armstrong takes the commands, he immediately pitches forward "to maintain his ground speed". This is hilarious, they talk like Amrstrong was flying a plane in earth's atmosphere and not a lunar module in the void of space. Armstrong does not need to pitch forward to maintain the speed, because, on the moon, there is not air to slow down the lunar module, and consequently it is going to keep its horizontal speed as long as no horizontal force comes to counter it. If Armstrong pitches forward, he is not going to maintain the horizontal speed, but he is going to increase it much to the contrary... |
 This is as much more illogical that he later pitches backward to decrease the horizontal speed. Why increase the horizontal speed if it is to decrease it later? Just to waste the precious fuel he is soon going to be short of? |
 And, at the moment that the astronauts most need it, the radar shows a problem, and becomes unusable! |
 They say: "Wisps of dust are blown from little West crater" and "A substantial sheet of dust is raised by the engine's exhaust" But these are not wisps of dust, what we see is too regular and rectilineal to be wisps of dust. |
 It is very obvious that what we see here rather looks like sweeping light beams. |
| What we see is very obviously something which could only happen in earth's atmosphere and not the void of the moon, and moreover requires hidden light sources. |
 Normally, just before landing, the lunar module should be perfectly stationary relatively to the lunar surface, and descend vertically. |
 Indeed, the lunar module cannot afford to land with a lateral speed. It has not wheels, and the lunar ground is not flat, there migth be rocks, and little craters at the place it lands, which would cause it to tip over if it was landing with a lateral speed. |
 Yet, see what happens before the lunar module finally lands; observe the artefacts on the ground (the little stones we see), they keep moving...And they don't even move in an unique direction, but even in several directions. |
 It means that, far from descending vertically, and being stationary relatively to the lunar ground, the lunar module is landing in ZigZag. |
 And, if it lands that way, it is almost sure to tip over when touching the ground. |
 I was sure that they would hide a hint in the "shadow" of the lunar module (or what is supposed to be its shadow, for I am sure it is not really its shadow) just before the touchdown. I easily found it, and I show the excerpt in which this hint happens. See the lem's bottom, it suddenly changes, and it only lasts a fraction of second, for immediately after it becomes like it was before again. And you'll also notice that, during this fraction of second, the lunar ground becomes suddenly more clear. |
 I show this excerpt slowed down, so you can better see. |
 And I even show a close-up of it. Strange, isn't it? |
 When the lunar module is on the ground, we can see its shadow projected on the lunar ground. It is interesting to compare it with a correct model of the lunar module. |
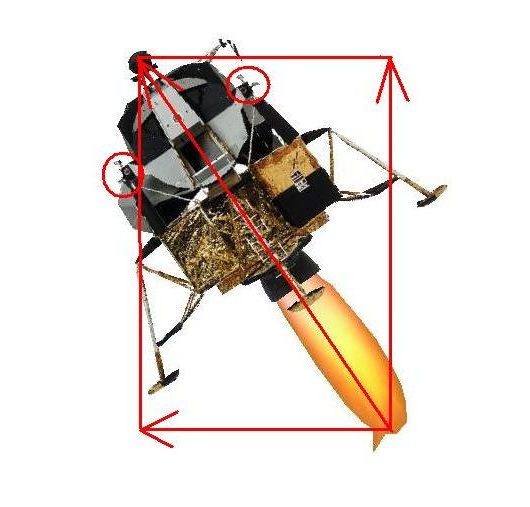
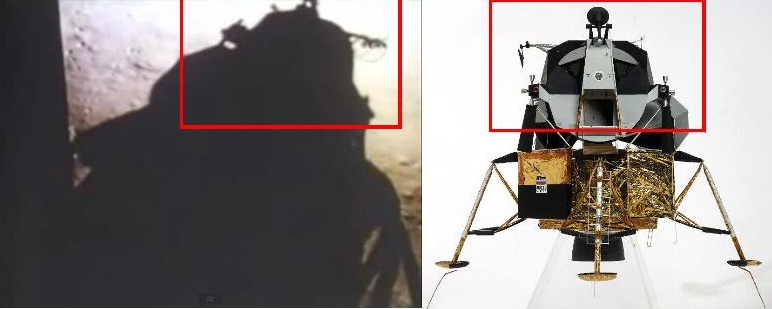 What is interesting to compare is the top of the lunar module, and in particular the antennas. |
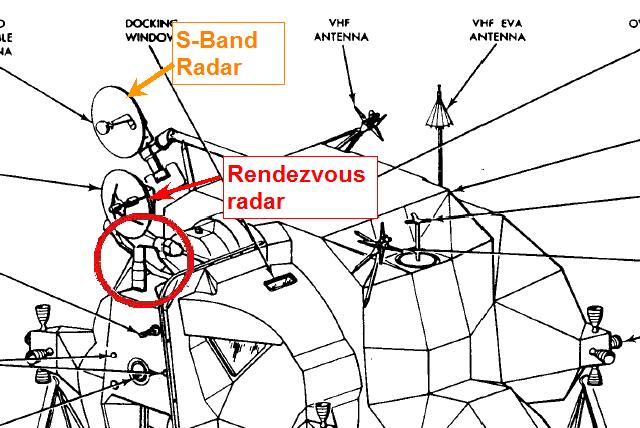 I show here the top of the lunar module as represented on a schema of the lunar module handbook. I indicate the rendezvous radar (red), which was placed on the front of the lunar module, and the S-Band antenna (orange), which was placed on the side of the lunar module. I have circled the lower part of the rendezvous antenna, for it is the only part of this antenna we can see on the shadow. It is still enough to know the orientation of this antenna on the shadow. |
 This animation I have made from the schema of the LM handbook shows how the rendezvous antenna was moving; it is not very good, for, in order to make it better, I would have needed several views of this antenna, whereas I only used one (the one of the schema), but it still fulfills its goal of showing how this antenna was moving. |
 On this stereoscopic view, I show the rendezvous antenna and the S-Band antenna, both on the LM's shadow and the LM's model (which is completely accurate). We only see the lower part of the rendezvous antenna on the shadow, but this part is sufficient to know how it was oriented. |
 Now look: The way the shadow of the rendezvous antenna appears on the LM's shadow, we can see that it is oriented along the arrow I have drawn in red...and the shadow of the S-Band antenna is oriented along the arrow I have drawn in orange. These two arrows should have perpendidular directions, since the S-Band antenna is placed on the side of the LM, but they have parallel directions instead! |
 All these events must have seriously upset Buzz Aldrin, for he fattens quite a lot bewteen two photos while he gets out of the hatch. |
 Seriously, it would be time that you open your eyes on Apollo and see the joke it is. I have shown you that this descent was nothing else but a collection of jokes and absurdities. |
 My opinion is that, if Apollo really landed on the moon, it only could be with the help of God! But God is able of anything, isn't he? |

