CONTES DE L'ORDINATEUR DE BORD APOLLO
 J'ai lu le rťcit de Don Eyles, "Tales from the lunar module guidance computer", expliquant comment le guidage ťtait fait dans le module lunaire, et c'est vraiment la chose la plus hilarante qu'il m'ait ťtť donnť de lire, une sťrie de gags que je vais expliquer dans cet article. video. |
 Ils disent qu'ils retardent l'armement du moteur, car ils soupÁonnent qu'il y a une fuite, et l'armement prťmaturť du moteur pourrait avoir des consťquences explosives lorsque le moteur est mis ŗ feu. Mais cela ne rťsout pas le problŤme de la fuite: Peut-Ítre que le moteur n'explosera pas ŗ l'allumage, mais il pourrait exploser plus tard. |
 Ce n'est que reculer pour mieux sauter. S'ils soupÁonnent une fuite, pourquoi ne rťparent-ils pas simplement cette fuite? |
 Ils se plaignent que l'AGC s'est comportť de maniŤre incorrecte parce que le moteur ťtait plus lent ŗ rťagir qu'attendu (ŗ cause d'un problŤme de pressurisation), et un paramŤtre n'ťtait pas convenablement rťglť parce qu'ils n'en ťtaient pas informťs. |
 Hť, ce n'est pas leur faute, monsieur "personne ne le leur a dit"! Peut-Ítre que celui qui aurait dŻ les informer dira qu'ils auraient du deviner par eux-mÍmes! |
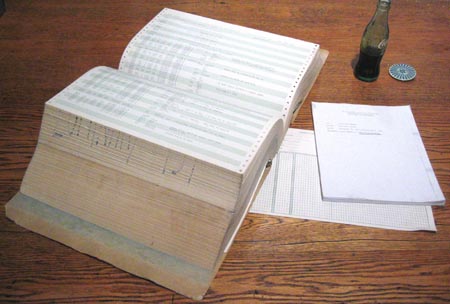 J'aime Áa: "Le programme d'ordinateur ťtait encore assez petit pour tenir dans un seul listing"...voyez la taille du listing, LOL! |
 L'ordinateur travaillait avec le systŤme mťtrique, mais les astronautes n'aimaient pas le systŤme mťtrique et ťtaient trop paresseux pour faire l'effort de travailler avec; l'ordinateur avait donc la t‚che de convertir les unitťs dans des unitťs anglo-saxonnes pour leur convenir. |
 Bien sŻr, il avait plein de temps ŗ gaspiller, il faisait plein de redťmarrages pendant la descente, surtout au moment le plus crucial, parce qu'il manquait de temps pour faire son travail! |
 J'aime Áa: L'ordinateur voit le radar dans une mauvaise position, mais ses interrupteurs sont dans la bonne position; alors l'ťquipage a du mettre les interrupteurs dans la mauvaise position de maniŤre ŗ faire disparaÓtre l'alarme! |
 Armstrong a du passer le taux d'autopilote de 5 degrťs/seconde ŗ 25 degrťs/seconde...Mais est-ce que l'autopilote n'est pas censť se rťgler lui-mÍme? Et les donnťes radar peuvent seulement Ítre incorporťes dans le systŤme de guidage si les astronautes le permettent. Cela signifie qu'ils peuvent dťcider d'alunir sans l'utiliser! |
 Ils disent aussi que, si les donnťes radar sont incorporťes dans la navigation, elles ne l'affecteront pas de maniŤre "adverse". Quelle serait l'utilitť du radar s'il affectait le guidage de maniŤre adverse? |
 L'ordinateur a un problŤme, envoie une alarme, et attend un ordre avant de continuer. Les ingťnieurs sont paniquťs, et ne savent comment rťagir. |
 Finalement Houston prend la dťcision de donner le "Go" pour permettre ŗ l'ordinateur de continuer (le "Go" est donnť par un jeune hťros). Mais cela prend une deme-minute, et, pendant de temps, les astronautes sont laissťs dans l'incertitude. |
 J'aime Áa: "Dans la transcription officielle de la communication entre le vaisseau spatial et le sol pendant la descente motorisťe, ce sont les seuls points d'exclamation". Alors le transcripteur a ťtť capable de lire des points d'exclamation dans les mots oraux d'Armstrong! Quel transcripteur! |
 Ils disent qu'ils ont b‚ti un systŤme de temps rťel rťvolutionnaire parce qu'ils lui ont donnť des fonctionnalitťs...qui existent dans tous les systŤmes de temps rťel, et qui sont ŗ la base du temps rťel. |
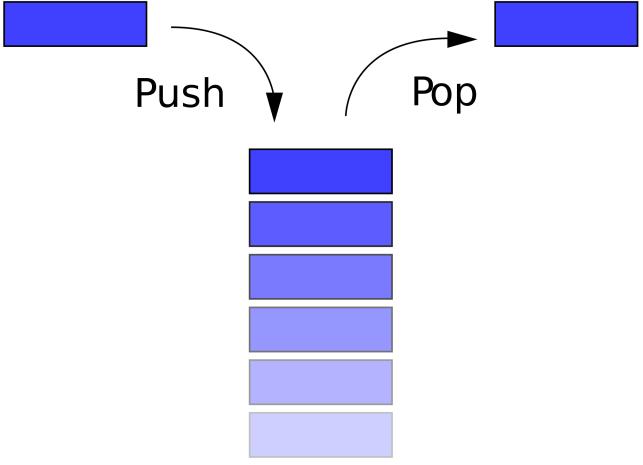 De plus, le minimum absolu pour un temps rťel est d'avoir une pile d'appels, et l'AGC n'avait pas de telle pile. Et il n'avait pas d'instruction pour gťrer le temps rťel. Comment est-ce que les jobs ťtaient gťrťs sans instruction pour le faire? |
 Ce qui est hilarant est la table de t‚ches d'ils donnent: le job SERVICER, qui contient les t‚ches les plus importantes, comme le guidage, qui est essentiel et devrait tourner de maniŤre rťguliŤre, avait la prioritť la plus basse. |
 D'un autre cŰtť, les t‚ches d'interface, comme l'affichage et la gestion du clavier, sont dotťes d'une prioritť plus ťlevťe que SERVICER. C'est le seul systŤme temps rťel que j'ai jamais vu dans lequel les t‚ches d'interface humaines reÁoivent une prioritť plus ťlevťe que les t‚ches automatiques critiques! |
 Le mode AUTO d'Apollo 11 correspondait prťcťdemment au mode MANUAL, alors que le mode LGC correspondait prťcťdemment ŗ un mode AUTO!!! Donc, lorsque les astronautes se connectaient sur AUTO, ils pouvaient avoir un doute s'ils ne se connectaient pas en fait sur MANUAL! |
 Ce diagramme est hilarant! AUTO et SLEW font exactement la mÍme chose. Et LGC, comme AUTO et SLEW, se connecte ŗ une rťfťrence de 28 volts et 800 Hertz; mais cette rťfťrence est dťphasťe par rapport ŗ l'autre rťfťrence, et ce dťphasage fait que le rťsolveur gťnŤre des impulsions d'angle mÍme lorsque le radar n'est pas connectť, crťant ainsi de fausses donnťes avec lesquelles l'AGC travaille! |
 Ils parlent de ce problŤme qui a ťtť "documentť mais jamais corrigť!" C'ťtait mieux de le laisser ainsi, afin qu'il continue de crťer des problŤmes! |
Ceci aurait pu Ítre ťvitť en utilisant la mÍme rťfťrence de 28 Volts! Ils disent aussi que le dťphasage dťpend du moment oý le LGC est mis sous tension!! C'est tout ŗ fait faux, il ne peut dťpendre que la maniŤre dont l'ťlectronique est faite, et non du moment oý le LGC est mis sous tension. Ils font compter les impulsions d'angles directement ŗ l'AGC avec des instructions spťciales!!! Ces impulsions auraient du Ítre comptťes avec un compteur ťlectronique, lu avec une opťration IO. |
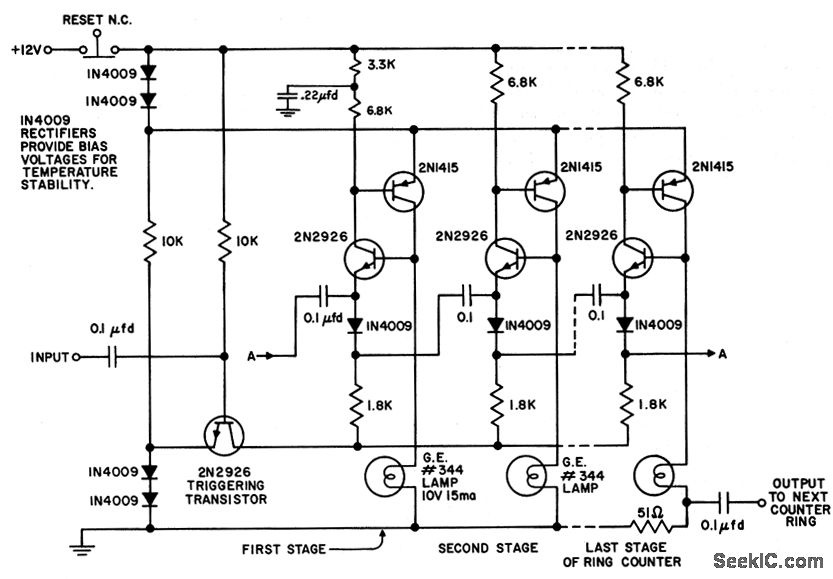 Voici un exemple de compteur ťlectronique qui peut compter des impulsions matťrielles, et de tels circuits existaient au temps d'Apollo. |
 Et le compte d'impulsions peut Ítre lu avec une opťration de lecture I/O, et l'AGC avait une instruction pour le faire, et il n'avait donc pas d'excuse pour ne pas procťder ainsi. |
 Le fait de les compter avec des instructions logicielles ťtait un gaspillage consťquent de temps de cycle, et retire inutilement du temps ŗ l'AGC...Surtout quand l'AGC manque de temps pour exťcuter ses opťrations, et doit faire de frťquents redťmarrages ŗ cause de cela. |
Et l'interface radar sort un signal de frťquence fixe, qui n'est mÍme pas modulť par les impulsions d'angle, et qui est transformť en un autre signal avec une frťquence fixe diffťrente. Un non-sens complet! |
 George s'est prťcipitť ŗ Houston juste une heure avant le dťcollage du module lunaire depuis la lune, pour parler aux reprťsentants du MIT de quelque chose qui volait du temps au processeur; il aurait encore eu le temps de trouver une solution pour le programme de l'AGC...Si celui-ci n'ťtait pas dťjŗ sur la lune! Mais les reprťsentants du MIT avaient encore le temps de faire une priŤre pour les astronautes! |
 Quelque chose "volait" du temps ŗ l'AGC, mais ils n'ont jamais trouvť ce que c'ťtait, et ils ont donc du prťserver une marge de temps pour l'AGC...Une marge qu'ils mangeaient inutilement en convertissant les unitťs, et en comptant des impulsions matťrielles avec des instructions logicielles! |
 Le simple fait d'ajouter un affichage fait que la marge de cycle de fonctionnement tombe de 13% ŗ 10%, provoquant davantage d'alarmes et de redťmarrages de l'ordinateur! Et les astronautes passaient plus de temps ŗ acquitter les alarmes qu'ŗ s'occuper effectivement du guidage du vaisseau spatial! |
 Hilarant: Parce que SERVICER avait la prioritť la plus basse, il ťtait traitť aprŤs tous les autres processus; mais parce qu'il accaparait de la mťmoire nťcessaire aux autres processus, les autres processus ne pouvaient plus tourner lorsque SERVICER avait ťpuisť toutes les ressources mťmoire...qu'il ne pouvait pas utiliser parce que les autres processus plus prioritaires ne lui laissaient pas le temps nťcessaire pour tourner! |
 C'est le serpent qui se mord la queue! |
 Le moment oý l'AGC dťrangeait le plus les astronautes, avec des alarmes plus frťquentes, est prťcisťment le moment oý leur attention pour le guidage aurait ťtť la plus nťcessaire! C'ťtait manifestement un ordinateur qui avait besoin de beaucoup d'attention! |
 Les programmeurs remarquent des "oscillation de poussťe", pour lesquelles ils imaginent deux origines diffťrentes: 1) L'IMU (plateforme inertielle) serait "secouťe" et perturberait la lecture des accťlťromŤtres. 2) La commande de poussťe aurait un effet un peu retardť et ne serait pas immťdiatement prise en compte par le moteur. Les deux explications sont aberrantes. |
 1) L'IMU ne peut pas Ítre secouťe, car la navigation est "normalement" trŤs rťguliŤre surtout qu'il n'y a pas de perturbations atmosphťriques sur la lune, gr‚ce au systŤme de guidage trŤs "fiable", et il ne pourrait pas en rťsulter de telles secousses sur l'IMU; si elle ťtait vraiment secouťe de cette maniŤre, cela voudrait dire que le module lunaire a un comportement trŤs dangereux, et a toutes les chances de s'ťcraser sur la lune! 2) Cela n'a pas d'importance si la commande de poussťe a un effet un peu retardť sur le moteur (seulement des fractions de seconde), le systŤme de guidage reste rťgulier et ne peut en aucun cas produire des oscillations de poussťe (dans l'aviation aussi l'effet de la commande est un peu retardť, et cela ne crťe pas d'oscillations). Les deux explications n'ont donc pas de sens, il ne peut pas y avoir d'oscillations (ŗ moins que l'ordinateur ne dťconne). |
 Alors un programmeur applique une compensation de 0,2 seconde ŗ cause du retard entre la commande de poussťe et la poussťe rťsultante. Son supťrieur lui dit que ce n'est pas suffisant et que cela devrait Ítre 0,3 seconde. Mais le programmeur rťtorque que "c'est comme la mťdecine, ne pas compenser plus que nťcessaire". |
 Son supťrieur sait que ce n'est pas "comme la mťdecine", et persiste ŗ penser que la compensation est insuffisante pour corriger les oscillations, mais il laisse son subordonnť faire comme il l'entend, "pour nourrir sa confiance en soi", espťrant qu'il la corrigera ťventuellement. Alors une bonne entente entre les programmeurs vaut mieux qu'assurer la sťcuritť du vaisseau spatial, n'est-ce pas? |
 Finalement, Apollo sera sauvť, parce que la performance du moteur avait ťtť amťliorťe, et que la compensation ŗ priori insuffisante suffisait ŗ prťsent, et contrait correctement les oscillations. Si la compensation correcte avait ťtť programmťe, Apollo aurait pu s'ťcraser, juste parce que l'ťquipe de dťveloppement n'avait pas ťtť informťe de l'amťlioration du moteur. |
 Alors la combinaison d'un supťrieur tolťrant et d'une documentation dťficiente a sauvť Apollo! C'est un vrai scťnario hollywoodien! |
 Et le plus drŰle est qu'aucune compensation n'aurait dŻ Ítre appliquťe! |
 Quel est l'utilitť de compenser le temps de rťaction de 0,3 ou 0,2 seconde du moteur, alors que SERVICER ne tournait que toutes les 2 secondes (au mieux), et que SERVICER pouvait alťatoirement Ítre interrompu par une autre t‚che entre les lectures d'accťlťromŤtres et l'application de la correction...Surtout quand aucune compensation ne peut Ítre appliquťe, comme les lectures des accťlťromŤtres ne peuvent Ítre prťdites! |
 Nous nageons donc ici dans un ocťan d'absurditťs! Mais la "compensation" a offert une histoire digne d'un scťnario hollywoodien! |
 Ils disent aussi qu'ils ont rťsolu les secousses de l'IMU en retirant les variations de vťlocitťs dues ŗ ces secousses. C'est un non-sens total. |
 Il ne peut y avoir de secousses sur l'IMU, comme je l'ai expliquť, parce que la navigation est (normalement) rťguliŤre, et il n'y a aussi pas moyen que les variations de vťlocitť dues aux secousses sur l'IMU puissent Ítre calculťes! De plus, si l'IMU ťtait vraiment sujet ŗ des secousses, il ťtait beaucoup plus simple de convenablement l'arrimer pour l'empÍcher de bouger, que de faire des corrections de vťlocitť basťes sur son comportement supposť (ce qu'il n'est mÍme pas possible de faire, comme ce comportement est alťatoire). |
 Ils disent qu'ils avaient ajoutť une possibilitť que l'ťquipage puisse sťlectionner le niveau de poussťe dťsirť par le guidage!!! Mais, s'ils le sťlectionnent, il n'est plus dťsirť par le guidage! |
 Ils disent qu'ils avaient ajoutť une possibilitť que les astronautes prennent le contrŰle de la poussťe alors que l'AGC gardait le contrŰle de l'orientation du module! C'est une aberration totale, car le couple "poussťe moteur/Orientation lem" ne peut Ítre dissociť; leur association dťtermine la magnitude des forces horizontale et verticale crťant les dťcťlťrations nťcessaires; leur contrŰle doit Ítre donnť ŗ une mÍme intelligence, et il vaut mieux que ce soit celle de l'ordinateur. |
 C'est comme le conducteur d'une voiture qui dit ŗ son passager:" Maintenant je ferme les yeux, tu surveilles la route, mais je garde le volant"! |
 Parce que SERVICER ťtait parfois incapable de rťaliser son travail dans la pťriode donnťe de 2 secondes, causant ainsi un plantage de l'ordinateur et un redťmarrage, ils imaginent ŗ prťsent de lui donner une pťriode flexible qu'il peut mesurer lui-mÍme, de sorte qu'il ait toujours le temps de rťaliser la t‚che qu'il a ŗ faire. |
 Cela peut ťviter la surcharge, mais ce n'est plus du temps rťel, parce que, dans le temps rťel, une t‚che critique doit toujours effectuer son travail dans un temps prťdťterminť qu'elle ne doit pas dťpasser. Il n'y a rien de tel que du temps rťel "flexible". |
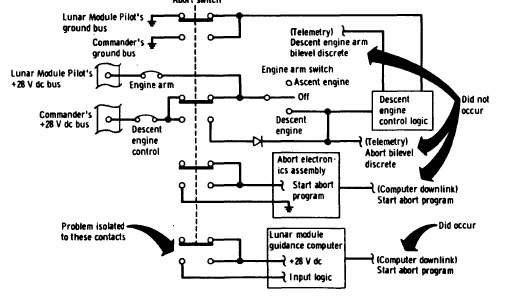 Ils ont un signal parasite sur le bouton d'abort qui provoque un abort non dťsirť qui pourrait dťranger le guidage d'Apollo. Vous pourriez alors vous attendre ŗ ce qu'ils aient ťlectroniquement filtrť ce signal parasite pour l'empÍcher de provoquer un abort? |
 Non, pas du tout, il ont imaginť une solution" Apollo", en trompant la procťdure d'Abort, et lui faisant croire qu'un abort ťtait dťjŗ en cours de traitement. |
Parfois le systŤme plantait parce que SERVICER avait ťpuisť toutes les zones VAC dont avaient besoin d'autres t‚ches plus prioritaires (et que SERVICER ne pouvait utiliser parce que les t‚ches plus prioritaires l'empÍchaient de tourner), mais ils prťvoyaient de gaspiller encore plus de zones VAC en y installant des bouts de code dedans; de cette maniŤre, les alarmes et les redťmarrages arriveraient encore plus souvent! |
 Donc, ce rťcit, que la plupart des gens pensent sťrieux et trŤs informatif, lorsqu'il est vu du point de vue d'un ingťnieur, est en fait trŤs drŰle, et n'a aucune crťdibilitť. |
 Il n'est pas possible que ce rťcit puisse Ítre sťrieux, et il ne fait aucun doute pour moi que ce rťcit contient un message cachť des ingťnieurs qui ont travaillť sur l'AGC, et un acte de rťbellion contre ceux qui les ont forcťs ŗ truquer le projet. |

