
ABSTRACT:
Toy manufactures are continuously seeking ideas for future toys.
The recent success of high-tech toys, such as "Tickle-Me Elmo"©,
electronically controlled "Laser Tag"© and the continued success of radio controlled
cars, demonstrate a large market for battery powered toys. In keeping with
this trend, the Mechanical Following Puppy may become the next major success
story.
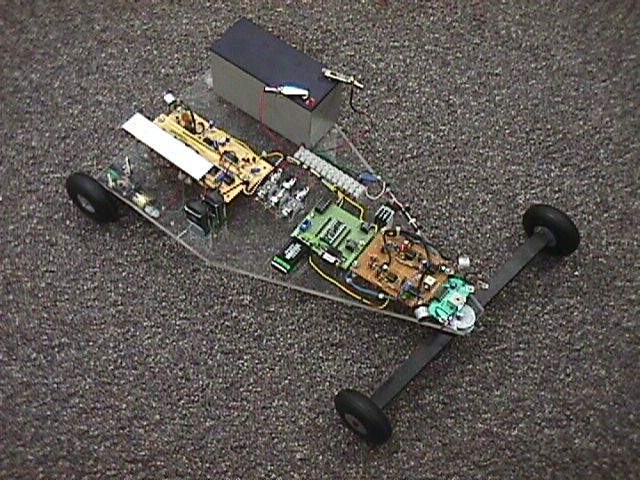
The Mechanical Following Puppy is an engineering design project that
tracks and follows a wireless communications signal. The design team
has developed a small hand-held transmitter that may be clipped to the
owner’s waist or key chain. The puppy has three receivers attached to
its chassis to help track the signal. These incoming signals are
amplified and stored in memory for the microprocessor controller to
logically determine the direction of the signal. Once the signal
direction has been determined by signal strength comparisons, the
controller actuates a steering motor and sends a signal to the drive
system, causing the puppy to move towards the owner. An infrared proximity
detector has been incorporated in the design for object avoidance. The
Mechanical Following Puppy is battery powered.
INTRODUCTION:
The Mechanical Following Puppy utilizes ultrasonic wireless communications
to track and follow its owner. A microprocessor controller serves as the brain
of the puppy by accepting information from an infrared proximity detector and three
communications receivers. Analyzing this information, the microprocessor
determines which direction to steer and when to activate the drive system.
The major components of the Mechanical Following Puppy include the transmitter,
receivers, microprocessor controller, infrared proximity detector, and an
H-Bridge drive circuit.
Ultrasonic Receivers
Microprocessor Controller
Infrared Proximity Detector
