
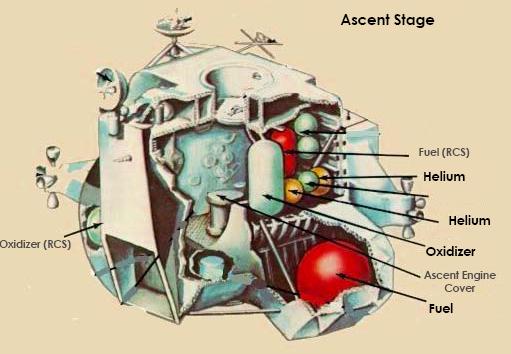
 Cette partie traite d'un trčs spécial rapport de progression d'Apollo écrit par un ingénieur de la BASA. Lien vers le document de la NASA |
 Ils disent: "A tiny pin dropped out of a backup counter in the CM telescope during the Apollo 9 mission and made the motion sticky. The navigator freed up the stickiness with a hand tool and had no further problem. Since the counter information is displayed on the DSKY, the loss of it did not interfer with mission objectives" Soit: "Un petite patte tomba d'un compteur dans le téléescope di CM durant la mission d'Apollo 9 et rendit la manipulation du télescope difficile. Le navigateur rendit la manipulation du télescope plus aisée avec un outil et n'eut plus de problčme. Puisque l'information du compteur est affichée sur l'écran de l'ordinateur, sa perte n'interféra pas avec les objectifs de la mission" Comment une petitte patte tombée peut-elle avoir un effet sur la manipulation du télescope? Le téléscope devrait ętre protégé de telle sorte qu'un tel événement ne puisse géner sa manipulation normale.  Mais le fait de créer une possibilité de problčme fait le goűt de l'aventure. |
 Ils disent: "Based on these data, the flight computer is loaded with compensation values for 15 coefficients describing the non-perfect behavior of the IMU. These coefficients are quite stable an repeatable in a good IMU". Soit: "Basé sur ces données, l'ordinateur de vol est chargé avec des valeurs de compensation pour 15 coefficients décrivant le comportement non parfait de l'IMU (plateforme inertielle de navigation). Ces coefficients sont assez stables et répétables dans une bonne IMU". Il n'y a pas moyen que des problčmes de l'IMU puissent ętre prédits et automatiquement corrigés. Mais les ingénieurs d'Apollo aiment ŕ inventer des corrections fantaisistes pourvu qu'elles fassent impression. |
 Il disent: "The long coasting period after the boost into orbit with no apparent output from the accelerometer was disconcerting...so much that a small translation maneuver along the Y axis was executed with the reaction control jets, just to see if the accelerometer was alive, even though the failure detection logic for the accelerometers had indicated the unit was normal." Soit: "La longue période de navigation aprčs le passage en orbite avec aucune sortie apparente de l'accéléromčtre était déconcertante.. Si bien qu'une petite maneuvre de translation le long de l'axe Y fut exécutée avec les réacteurs de contrôle, juste pour voir si l'accéléromčtre était encore en vie, quoique la logique de détection de panne ait indiqué que l'unité était normale". Une fois que le vaisseau est en orbite, sa vitesse est constante, et il n'est donc pas étonnant que l'accéléromčtre ne montre pas de sortie, et il n'y a pas lieu de s'inquiéter que sa sortie soit nulle, surtout si la logique de détection de panne montre que l'accéléromčtre fonctionne normalement. S'il mettent ŕ feu les réacteurs de contrôle, ils créent une accélération que l'accéléromčtre montre alors. S'inquiéter de quelque chose de normal, afin d'évacuer le stress et plus tard ne pas s'inquiéter de quelque chose de moins normal! |
Ils disent: "In the second case, an accelerometer performance change, which must have occurred about the time of liftoff of Apollo 8, left the spacecraft indication of orbital perigee lower than as indicated from the ground tracking and the Saturn guidance". Soit: "Dans le second cas, un changement de performance d'accéléromčtre, qui doit s'ętre produit au moment du décollage d'Apollo 8, résulta en une indication du périgée orbital du vaisseau plus basse que celle indiquée par le suivi au sol et le guidage de la fusée Saturne". Cela n'a pas de sens, car le suivi au sol et le guidage saturne ne peuvent pas localiser le CM avec assez de précision pour détecter que le CM ferait une erreur dans le calcul du périgée ŕ cause d'une petite erreur sur un accéléromčtre du CM. Peu importe ce que vous comparez tant que vous comparez quelque chose, telle est la rhétorique d'Apollo. |
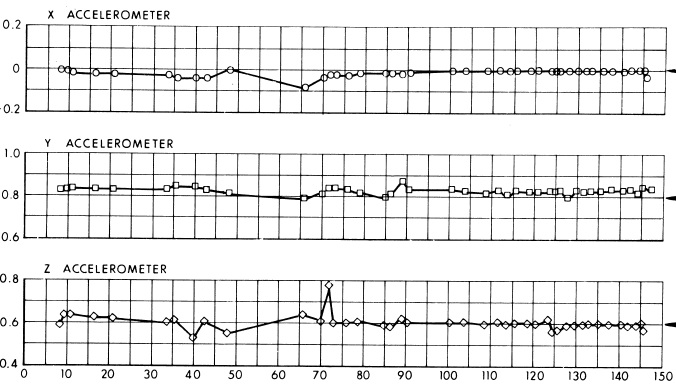 Ils disent: "The flight of Apollo 8 to the moon gave an excellent opportunity to watch this zero input accelerometer performance because the IMU was left running the whole 147 hours and, unlike earth orbital flights, the spacecraft stayed in sight of the telemetry receiver stations. The complete set of data obtained are shown in figure 3". Soit: "Le vol d'Apollo 8 vers la lune offrit une excellente opportunité de surveiller l'entrée zéro de l'accéléromčtre car l'IMU fonctionna pendant les 147 heures, et, différemment des vols orbitaux autour de la terre, le vaisseau resta en vue des stations de réception télémétrique. Le jeu complet de données est montré sur la figure 3". Les stations de réception sur la terre peuvent recevoir les mesures des accéléromčtres via la télémétrie, mais il n'y a pas moyen qu'elles puissent en déduire leur bias, car elles ne disposent de rien pour en faire la comparaison; les stations n'ont pas d'autre moyen pour faire des mesures précises des accélérations du vaisseau spatial; le radar permet de faire une estimation de la vitesse avec l'effet Doppler, dont la dérivation permettrait d'obtenir une estimation de l'accélération, mais cette mesure est loin d'ętre aussi précise que les mesures des accéléromčtres du vaisseau spatial. Mais ces graphes font impression, n'est ce pas ce qu'on attend d'eux? |
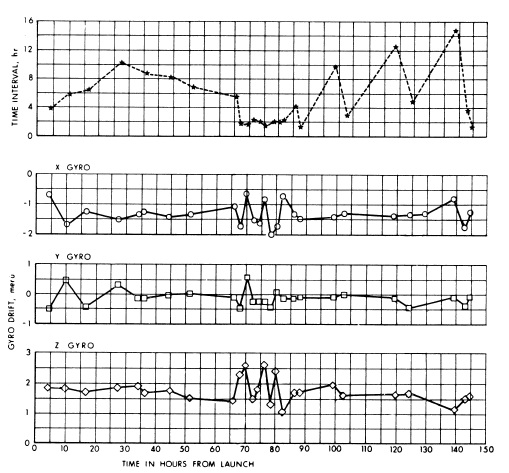 Ils disent: "The IMU gyro drift term under near zero acceleration environment can also be measured during flight by measuring the angle change which the IMU realignment process requires by the time since the last alignment. These results are displayed in Figure 4 for the Apollo 8 flight" Soit: "La dérive gyroscopique de l'IMU dans un environnement proche de l'accélération zéro peut aussi ętre mesurée durant le vol en mesurant le changement d'angle qui est requis par le processus de réalignement de l'IMU depuis le dernier alignement. Ces résultats sont affichés sur la figure 4 pour le vol d'Apollo 8". La seule maničre de réaligner l'IMU est lorsque l'astronaute fait une visée d'étoiles avec le téléscope. l'IMU ne peut pas se réaligner automatiquement de par lui-męme. Et l'alignement par la visée téléscopique est un processus laborieux qui n'est fait qu'occasionellement, car la dérive gyroscopique est assez lente, et les lectures des gyros restent assez longtemps fiables. La dérive gyroscopique accroît avec le temps de maničre presque linéaire. Sur ce diagramme, le premier graphe montre le temps entre deux réalignements de l'IMU, et les trois autres graphes les dérives gyroscopiques correspondantes des trois angles spatiaux. 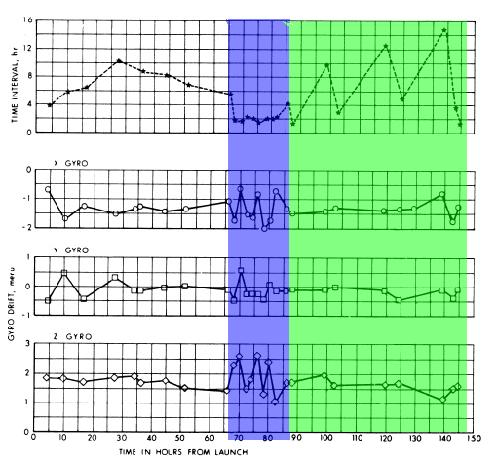 Sur la partie que j'ai colorée en bleu, la période de réalignement est presque constante, et cela devrait aussi ętre le cas des dérives gyroscopiques correspondantes; au lieu de cela, vous voyez qu'elles montrent des variations conséquentes. Et, sur la partie que j'ai colorée en vert, la période de réalignement est en dents de scie; les dérives gyroscopiques, qui sont proches de fonctions linéaires de la période de réalignement, devraient aussi ętre en dents de scie; au lieu de cela, elles sont proches de constantes! En résumé, les dérives gyroscopiques sont inconsistantes avec la période de réalignement. Mais, tant que les graphes font impression, n'est ce pas ce qui compte? |
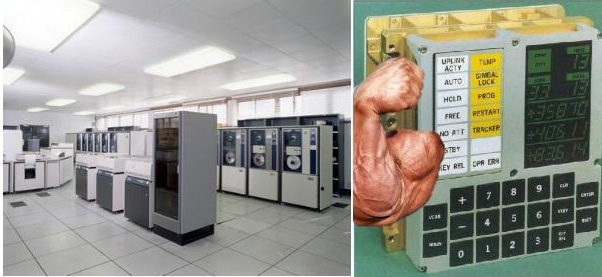
Ils disent: "By proper choice of IMU alignment, every phase of the Apollo mission can avoid gimbal lock attitudes. The forbidden zones are small and conceptually simple . Clear signals are given as these attitudes are approached. Moreover, if the IMU attitude is lost due to gimbal lock or any other cause, the IMU is not damaged, a clear warning signal is given, and the procedures for emergency and normal realignment are straightforward". Soit: "Par un choix adéquat de l'alignement de l'IMU, chaque phase de la mission Apollo peut éviter des attitudes de bloquage des cardans. Les zones interdites sont petites et conceptuellement simples. Des signaux clairs sont fournis alors que ces attitudes sont approchées. De plus, si l'attitude de l'IMU est perdue ŕ cause du bloquage des cardans ou toute autre cause, l'IMU n'est pas endommagé, un clair signal d'avertissement est fourni, et les procédures de secours et réalignement normal sont directes"  Si les cardans devaient se bloquer, cela pourrait arriver ŕ n'importe quelle attitude, pas une attitude donnée. Il n'est donc pas possible de déterminer des zones spécifiques dans lesquelles les cardans tendraient davantage ŕ se bloquer que d'autres. S'il y avait vraiment des attitudes spécifiques auxquelles les cardans sont susceptibles de se bloquer, ils ne seraient pas trčs utiles, car ils sont supposés mesurer des angles ŕ toute attitude. Et, s'il y a un problčme avec un gyroscope pour cause de bloquage de cardan, il ne serait pas possible de savoir s'il ne donne pas de sortie parce qu'il est bloqué, ou parce qu'il n'y a pas couramment de variation d'angle, comme il n'y a pas d'autre moyen de mesurer un angle. Inventer des zomes imaginaires de bloquage des cardans était si amusant pour les ingénieurs d'Apollo. |
 Ils disent: "Although the computer can take over the task of watching for gimbal lock and avoiding it by appropriate schematic maneuvers, this feature has not been authorized for the computer fixed memory program". Soit: "Quoique l'ordinateur puisse s'occuper de surveiller le bloquage des cardans et l'éviter par des maneuvres schématiques, cette possibilité n'a pas été implémentée dans la mémoire fixe de l'ordinateur." Ceci est ridicule, l'ordinateur lisant les sorties des gyros, et, lorsqu'ils s'approchent de zones de bloquage potentiel des cardans, jouant sur les réacteurs du RCS pour s'éloigner de des zones. Complétement délirant! Et, si cela avait vraiment un sens de faire cette surveillance, pourquoi cela n'aurait-il pas été implémenté dans le programme de la mémoire morte si cela pouvait avoir évité un bloquage des cardans néfaste ŕ la navigation? Faire travailler l'ordinateur inutilement, c'est si drôle aprčs tout! |
Ils disent: "An experiment performed in earth orbit on Apollo 8 used the IMU and the erasable memory in the computer to take over attitude control in a wide deadband automatic control. This was extremely efficient in the use of reaction control fuel. But, of significance here, this crew felt that they would be perfectly willing to operate in this mode while all three slept; the control system would keep attitudes well away from gimbal lock." Soit: "Une expérience réalisée dans l'orbite terrestre d'Apollo 8 a utilisé l'IMU et la mémoire dynamique dans l'ordinateur pour assurer le contrôle automatique de l'attitude. Ceci fut trčs efficace dans l'utilisation du carburant du RCS. Mais, ce qui est significatif ici, est que l'équipage agréa qu'ils se sentiraient parfaitement tranquilles d'opérer dans ce mode alors qu'ils étaient endormis; le systčme de contrôle garderait les attitudes éloignées du bloquage de cardan". Donc, alors que les trois astronautes dormaient, le systčme de contrôle mettrait ŕ feu les réacteurs du RCS ŕ chaque fois que le vaisseau s'approchait des zones imaginaires de bloquage potentiel des cardans, gaspillant ainsi inutilement de carburant dont il faisait certainement un usage "efficace".  A mourir de rire! |
 Ils disent: "The lunar landing will be made with the present 3-gimbal IMU. The question as to whether the complexity and performance compromise of the all-attitude 4-gimbal configuration was worth avoinding under the prevailing circumstances at the time of design commitment will not be answered"." Soit: "L'alunissage sera fait avec l'actuelle l'IMU ŕ trois gyroscopes. La question de savoir si la complexité et le compromis de performance de la configuration toutes-attitudes des quatre gyroscopes valait qu'on l'écarte dans les circonstances prépondérantes au temps des décisions n'aura pas de réponse." L'IMU des 3 gyroscopes mesure déjŕ trois angles, et, autant que je sache, l'espace est 3D, męme prčs de la lune. L'IMU ŕ trois gyros est donc déjŕ une IMU toutes-attitudes. Donc, qu'est ce qu'une IMU ŕ 4 gyros. Une IMU plus-que-toutes-attitudes? Les ingénieurs d'Apollo aiment travailler avec la 4čme dimension! |
 Ils disent: "For added confidence, after marking on two stars, the computer program provides a check of the star angle difference displayed to the operator. This is the difference of the measured angle calculated from the computer's catalog of star coordinates for the identified stars." Soit: "Pour plus d'assurance, aprčs avoir répéré deux étoiles, le programme de l'ordinateur fournit un contrôle de la différence d'angle stellaire affiché ŕ l'opérateur. C'est la différence de l'angle mesuré calculé ŕ partir du catalogue de coordonnées d'étoiles rentré dans l'ordinateur pour les étoiles identifiées." Les coordonnées des étoiles ne permettent pas de connaître leur orientation relativement au vaisseau spatial. Si c'était aussi simple, l'astronaute n'aurait pas besoin de faire d'alignement avec des étoiles, ces coordonnées permettraient directement de réaligner l'IMU. Les ingénieurs d'Apollo aiment faire des contrôles fantaisistes, il pense que cela vaut encore mieux de faire un contrôle fantaisiste que pas de contrôle du tout. |
 Il disent: "Not forecast, however, was the confusion caused by the debris cloud from the SIVB after separation. Confusion of particle and stars was so bad that is was not even possible to calibrate the sextant by superimposing star images on top of themselves while near this debris cloud." Soit: "Ce qui n'était pas prévu, cependant, était la confusion que le nuage de débris du SIVB pourrait causer aprčs séparation. La confusion des particules et des étoiles était telle qu'il n'était męme pas possible de calibrer le sextant en superposant les images d'étoiles sur elles-męmes ŕ proximité de ce nuage de débris." Les débris s'éloignent rapidement du CM, et aprčs ils deviennent pratiquement invisibles. La calibration du sextant n'est pas faite si rapidement que cela ne donnerait pas le temps au nuage de débris de s'éloigner. Et, de plus, les astronautes ne vont pas faire une calibration juste au moment de la séparation, il est évident qu'ils vont attendre un peu. Il est impossible de confondre une étoile avec un débris, car les étoiles sont bien plus lumineuses. Les ingénieurs d'Apollo aiment autant ŕ exagérer un risque inexistant qu'ŕ sous-estimer un danger réel. |
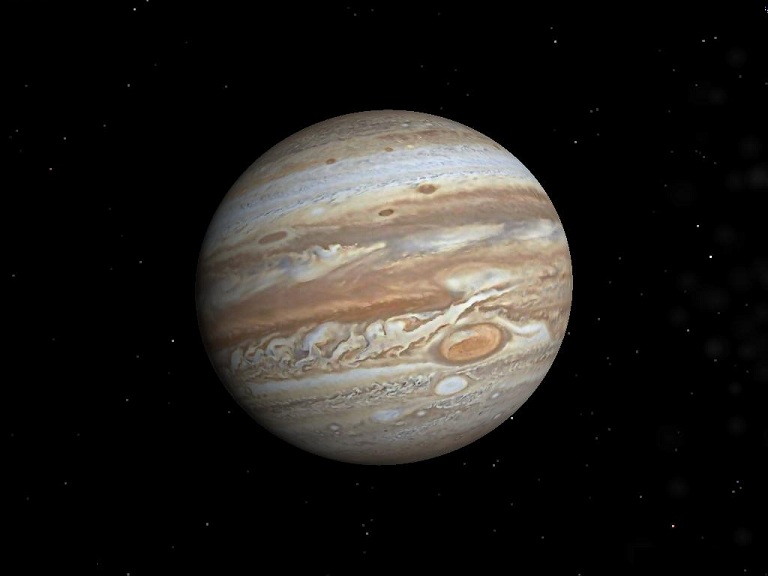 Ils disent: "CM IMU alignment was exercised using the coordinates of Jupiter as a non-catalog star inserted into the computer's memory. Automatic optics pointing was called and Jupiter appeared in view with a fine display of her moons". Soit: "Un alignement de l'IMU du CM fut réalisé en utilisant les coordonnées de Jupiter dans un catalogue de plančtes rentré dans la mémoire de l'ordinateur. Le pointage automatique de l'optique fut appelé, et Jupiter apparut en vue, avec un affichage net de ses lunes." Comme dit auparavant, les coordonnées de Jupiter (dans quel systčme???) ne permettent pas de connaître l'orientation de Jupiter relativement au vaisseau spatial.  Sűr que Jupiter est trčs utile ŕ la navigation! |
 Ils disent: "A sun filter is provided to make it possible to use the sun as an alignment target and was exercised the first time on Apollo 9. The filter worked well functionally -- even sun spots could be counted -- but the actual alignment was not performed". Soit: "Un filtre solaire est fourni pour rendre possible d'usage du soleil comme cible d'alignement et fut mis en oeuvre pour la premičre fois sur Apollo 9. Le filtre fonctionna bien - męme les tâches solaires purent ętre comptées- mais l'alignement ne fut pas vraiment réalisé". Un filtre solaire décroîtrait tant la luminosité pour contrer l'intense luminosité du soleil que cela ferait disparaître la mire. De plus, pour la précision de l'alignement, de petites cibles sont privilégiées, et le soleil est relativement troip gros pour ętre utilisé pour l'alignement. Et les tâches solaires sont si nombreuses qu'il serailt illusoire de les compter. Seuls les ingénieurs d'Apollo pouvaient avoir une idée aussi étrange que celle d'utiliser le soleil pour faire l'alignement. |
 Ils disent: "Using the P20 rendezvous program, the computer pointed the sextant at the LM and the navigator picked it up in the eyepiece 2700 nautical miles away and was able to keep track of it until it was blocked from view". Soit: "En utilisant le programme de rendez-vous P20, l'ordinateur pointa le sextant vers le LM, et le navigateur le répéra dans le viseur ŕ une distance de 2700 milles nautiques et fut capable de le suivre jusqu'ŕ ce qu'il le perde de vue". A une distance de 2700 milles nautiques, le navigateur pouvait voir le LM? Un mille nautique représente une minute d'arc de latitude, une minute vaut un 60čme de degré; la circonférence de la terre correspond ŕ 360°, et 360*60=21600 minutes; donc la distance correspondant ŕ un mille nautique est égale ŕ la circonférence de la terre divisée par 21600; si vous faites le calcul, vous voyez que cela correspond ŕ une distance de 1852 mčtres; donc 2700 milles nautiques correspond ŕ une distance de 5000 kilomčtres! Le navigateur du CM pouvait voir le LM ŕ une distance de 5000 km! Mais ce qui est vraiment surprenant est que le diamčtre de la lune est de 3474 kilomčtres. Alors comment le LM pouvait-il ętre ŕ une distance de 5000 kilomčtres? A moins que le mille nautique ne soit ŕ considérer comme une minute d'arc de la lune et non la terre. Męme ainsi, cela ferait encore une distance de 1362 kilomčtres. Aucune chance que le navigateur du CM puisse voir le LM ŕ une telle distance, il serait bien trop petit, et, męme s'il le pouvait, il serait de toute façon bloqué par l'horizon lunaire. Et, nous sommes dans une maneuvre de rendez-vous, ce qui signifie que le LM se rapproche du CM, donc, une fois que le navigateur du CM a le LM en vue, il devrait le garder en vue jusqu'ŕ l'accostage, comme il n'y a rien pour bloquer sa vue dans le vide lunaire. Si le navigateur a perdu le LM de vue aprčs qu'il l'ait vu ŕ une telle distance, cela veut probablement dire qu'il avait bu un coup de trop! |
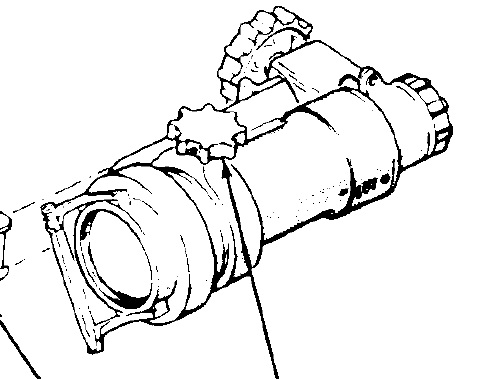
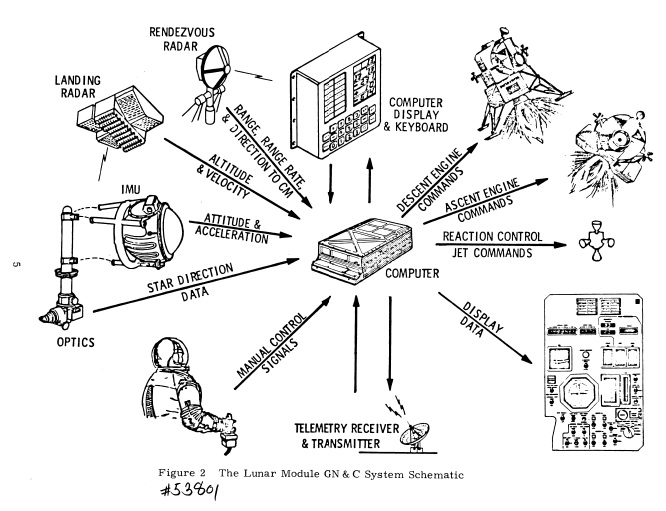
 Ils disent: "A 16mm movie camera was adapted to the sextant and carried on Apollo 8. Motion picture film of the lunar surface were obtained from orbit in this manner". Soit: "Une caméra 16 mm fut adaptée au sextant et transportée dans Apollo 8; Des films de la surface lunaire furtent obtenus depuis l'orbite de cette maničre". Regardez le sextant sur l'image, et expliquez moi comment il aurait été possible d'adapter une caméra 16mm dessus! Mais les ingénieurs d'Apollo sont capables de miracles, nest-ce pas? |
 Ils disent ceci ŕ propos de l'AGC: "Its necessary features include the ability to handle a number of different computational problems simultaneously in real time, interleaved in a single central processor on a priority basis". Soit: "Ses caractéristiques incluent la possibilité de gérer un nombre de problemes informatiques différents simultanément en temps réel, entrelacés dans un simple processeur central sur une base prioritaire".  Oh oui, l'AGC était si performant que les tâches devaient elles-męmes tester si une tâche plus prioritaire n'avait pas été lancée!  Une vraie révolution dans la gestion des tâches! |
 Ils disent: "The change control activity alone has seen over 750 program change requests from the various government teams and contractors processes through the program change board at MSC, Houston". Soit: "Le changement de contrôle d'activité ŕ lui tout seul a été l'objet de 750 requętes de changement de diverses équipes du gouvernement et fournisseurs ŕ travers le bureau de changement de programme ŕ MSC, Houston". Et bien 750 changements de programmes. Ont-ils retissé la mémoire ŕ chaque fois? Le tissage de la mémoire ŕ cordes de tores est si amusant! |
 Ils disent: "Considerable noise arriving from the telemetry receiver appeared at the up telemetry channel to the computer. The error checks and alarm in the decoding in the computer was able to reject the noise when the signals failed the logical test and bad data into the erasable memory was avoided". Soit: "Un bruit considérable arrivant du récepteur de télémétrie apparut sur la canal de reception de télémétrie de l'ordinateur. Le test d'erreur et alarme dans le décodage de l'ordinateur fut capable de rejeter le bruit lorsque les signaux échoučrent au test logique, et le chargement de mauvaises données dans la mémoire dynamique de l'ordinateur fut évité." Les tests d'erreur et alarmes pouvaient seulement détecter des mauvaises données, mais pas les corriger. Les mauvaises données non écrites dans la mémoire dynamique ne peuvent ętre remplacées avec de bonnes données, aucune donnée correspondant aux mauvaises données ne peut ętre écrite dans la mémoire dynamique. Le rejet du bruit voudrait dire que le test d'erreur est capable de transformer les mauvaises données en données correctes, ce dont il n'est pas capable. Mais que savons nous de quoi est capable le test magique d'erreur de l'AGC! |
 Ils disent: "For many situations, the computer program associated with the keyboard is able to detect illogical inputs to the DSKY due to mispunched keys. The DSKY will signal "operator error" so that the astronaut can try again". Soit: "Dans bien des situations, le programme d'ordinateur associé avec le clavier est capable de détecter des entrées illogiques sur le DSKY dues ŕ des erreurs de frappe. Le DSKY signale "Erreur opérateur" de sorte que l'opérateur peut réessayer". L'ordinateur peut tester que les valeurs rentrées par l'astronaute restent dans des limites acceptables, mais, si elles le sont, l'ordinateur ne peut vérifier si ce que l'astronaute a tapé est conforme ŕ ce qu'il avait l'intention de taper. A moins que l'ordinateur ne soit équipé d'une boule de cristal magique. |
 Ils disent: "Other error detection has been designed and experienced in flight which causes the computer to restart automatically. Restart causes the program to go back a few steps to a point where the computation state was put into memory and then start fresh from that point". Soit! "D'autres détections d'erreur ont été implémentées et testées en vol, lesquelles provoquent le redémarrage automatique de l'ordinateur. Le redémarrage fait revenir l'ordinateur un peu en arričre ŕ un point ou l'état de l'ordinateur a été sauvé en mémoire, et ensuire repartir ŕ nouveau depuis ce point". 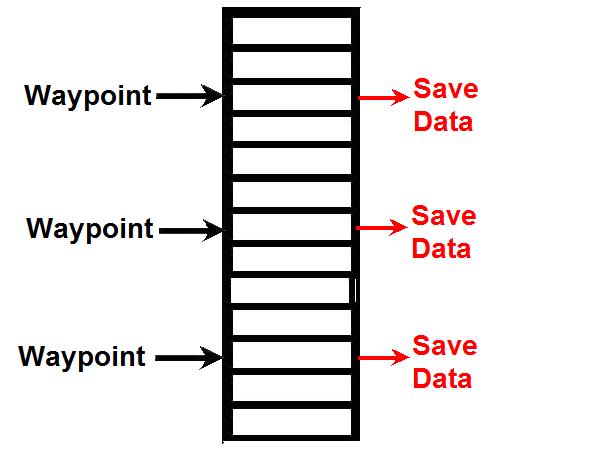 Dans le programme, ŕ des points réguliers, les données étaient sauvées; ces points oů les données étaient sauvées étaient appelés "waypoints" (points de passage); le redémarrage était fait en revenant ŕ point de passage le plus proche, en restaurant les données sauvées ŕ ce point de passage, et en repartant depuis ce point de passage avec les données qu'il avait alors. Mais, si l'ordinateur repart depuis ce point avec les données qu'il avait alors, et exécute le męme programme, une fois qu'il atteint le point du blocage, il aura les męmes données qu'il avait au moment du blocage. Cela veut dire qu'il fera un travail inutile qu'il a déjŕ fait, et perdra le temps correspondant ŕ le faire. De plus, le fait d'avoir ŕ sauver les données aux points de passage mange de la puissance du processeur, lui qui en manque déjŕ! L'ordinateur se bloque ŕ cause des tâches SERVICER (tâche périodique de guidage) ayant épuisé toutes les ressources disponibles. Il serait donc plus simple de juste jeter toutes les tâches SERVICER en attente lorsque l'ordinateur se blqoue, puisqu'elles ne seront jamais servies, et libérer leurs ressources de maničre ŕ les rendre disponibles pour les autres tâches. Mais pourquoi faire simple quand on peut faire compliqué! |
 Ils disent: "More serious internal logical problems of procedural errors have raised alarms requiring the astronaut manually to recycle back to the start of the program in progress. In few cases experienced, the crew have been able to recover without help". Soit: "Des problčmes internes de logique plus sérieux d'erreurs procédurales ont levé des alarmes requérant l'intervention manuelle des astronautes qui doivent faire repartir le programme courant depuis le début. Dans quelques cas rencontrés, l'équipage a été capable de se dépanner sans assistance". Si l'ordinateur est capable de lever une alarme requérant que l'opérateur fasse repartir le programme courant depuis le début, il devrait aussi ętre capable de le faire lui-męme! L'AGC requiert probablement l'intervention de l'astronaute parce que c'est un bébé qui a besoin d'ętre pris par la main. |
 Il disent: "In such situations, the ground has examined the state of the memory to verify that memory corrections do not need to be telemetered up." Soit: "Dans de telles situations, le sol a examiné l'état de la mémoire pour vérifier que des corrections en mémoires n'avaient pas besoin d'ętre téléchargées". De maničre ŕ examiner l'état de la mémoire, le sol devrait aussi avoir accčs ŕ la mémoire de l'AGC. Mais, pour avoir accčs ŕ cette mémoire, le contenu de la mémoire devrait d'abord ętre transmis par télémétrie au sol, et, vu la taille de la mémoire, cela ferait une certaine quantité ŕ transmettre. Que ce passe t-il si un astronaute a redémarré le programme, et le programme utitilise une donnée mémoire avant que le sol ait transmis une correction pour cette donnée? Probablement que le sol est extręmement rapide pour examiner la mémoire, trouver les données mémoires ŕ modifier, et retransmettre des corrections avant que le programme redémarré ne les utilise. Et le délai de transmission? Oublions le délai de transmission, nous n'allons pas nous embęter avec, n'est-ce pas? |
 Ils disent: "Computer program changes are not made easily and can be unsafe without time-consuming retesting." "But, in many cases, changing the program to accomodate hardware problems has nevertheless saved considerable time, effort, and expense". Soit: "Des changements de programme d'ordinateur ne sont pas faits aisément, et peuvent ętre non sécurisés sans des tests qui prennent du temps". "Mais, dans de nombreux cas, un changement de programme pour régler des problčmes matériels a néanmoins sauvé beaucoup de temps, d'effort et de dépense". Ils disent donc que le changement de programme ŕ la fois coűte beaucoup de temps en en sauve. N'est-ce pas contradictoire? Mais les ingénieurs d'Apollo n'ont pas peur des contradictions, n'est-ce pas? |
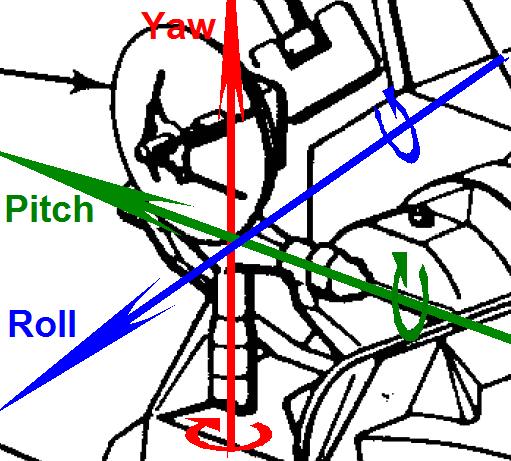
 Ils disent: "The attitude signals come from the IMU in quanta steps of about 1.01 degree, at, at low rates, no new information is available for rate indication until the next angle increment occurs. The system gets around this problem by providing in the computer a model of the spacecraft response to applied torques" Soit: "Les signaux d'attitude viennent de l'IMU en pas d'environ 1.01 degré; et, ŕ des taux bas, il n'y a pas de nouvelle indication pour le taux de changement jusqu'ŕ l'incrément d'angle suivant. Le systčme contourne ce problčme en fournissant ŕ l'ordinateur un modčle de la réponse du vaisseau aux torques appliqués." Mais, si l'IMU ne,voit pas de pas de mesure, cela signifie que l'angle ne change pas, et cela ne constitue pas une anomalie. Il n'y a donc pas lieu de contourner un problčme qui n'existe pas. Cela n'a pas de sens de construire un modčle de la réponse du vaisseau qui se substitue ŕ la réponse réelle du vaisseau telle que mesurée par l'IMU. Mais les ingénieurs d'Apollo raffolent probablement des modčles, et ils ont besoin d'en construire un męme lorsqu'il est inutile. |
 Ils disent: "With this knowledge of spacecraft mass, predetermined polynomials can be evaluated to give good estimates of spacecraft moments of inertia which directly allow an estimate of the angular acceleration produced by the controlled torques". Soit: "Avec cette connaissance de la masse du vaisseau, des polynômes prédéterminés peuvent ętre évalués pour donner de bonnes estimations des moments d'inertie qui permettent directement d'estimer une accélération angulaire produite par les torques contrôlés". Męme s'il était possible qu'ils puissent mettre ŕ jour la masse avec la connaissance du carburant brűlé, la connaissance de cette masse ne permet pas d'estimer une accélération angulaire produite par les torques contrôlés. Les ingénieurs d'Apollo aiment faire des estimations, męme lorsqu'elles n'ont pas de sens. |
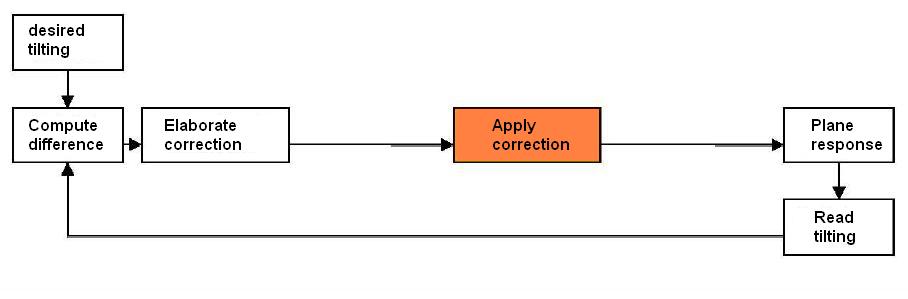
Ils disent: "Each iteration cycle of the autopilot examines the existing angle error and angle rate error. If either of these are outside chosen deadbands, the computer schedules and executes open loop the time history of two reaction jet firings which should bring both angle and rate errors to zero". Soit: "Chaque cycle d'itération de l'autopilote examine les erreurs d'angle et taux d'angle existantes. Si l'une de ces erreurs est en dehors de limites permises, l'ordinateur déclenche la mise ŕ feu de réacteurs qui devraient ramener ces erreurs ŕ zéro". L'autopilote ne peut pas examiner une erreur existante d'angle ou de taux d'angle, car il n'y a pas moyen qu'il puisse les estimer. Cela n'a donc pas de sens qu'il mette a feu des réacteurs pour corriger des erreurs imaginaires...Surtout qu'il ne pourrait pas ramener ces erreurs toutes deux ŕ zéro! A moins que les ingénieurs d'Apollo aiment ŕ jouer avec les réacteurs! |
 Ils disent: "The crew were desirous of having the control system in free-fall orbital flight respond to orbital rate calculated within the computer so that the spacecraft would hold attitude with respect to the local vertical without their attention. This feature has been proposed earlier as a program in fixed memory but had not been incorporated." Soit: "L'équipage était désireux que le systčme de contrôle en chute libre réponde au taux orbital calculé par l"ordinateur de sorte que le vaisseau tienne son attitude relativement ŕ la verticale locale sans qu'ils aient ŕ s'en occuper. cette fonctionnalité a été proposée pour ętre implémentée en mémoire morte, mais ne l'a finalement pas été". S'ils tombent en chute libre, il n'y a pas pas besoin de tenir l'attitude du vaisseau relativement ŕ la verticale locale, car le vaisseau spatial tient naturellement cette attitude. De plus, il est fortement déconseillé de faire un alunissage en chute libre, ce serait la pire maničre d'alunir, une garantie de s'écraser sur le sol lunaire. Et, si ce contrôle avait vraiment été utile et désirable, pourquoi n'aurait-il pas été implémenté en mémoire morte? C'est probablement parce que je ne comprend pas la logique tręs spéciale des ingénieurs d'Apollo! |
 Ils disent: "A week before the scheduled launch, a simple procedure to load a program and data into erasable memory by means of a few dozen DSKY keystrokes was transmitted to the astronauts. This provided the crew with the desired feature which operated in orbit as advertised". Soit: "Une semaine avant le lancement planifié, une procédure simple pour charger un programme et des données dans la mémoire dynamique au moyen de quelques douzaines de frappes sur le clavier de l'ordinateur fut transmis aux astronautes. Cela fournit ŕ l'équipage la fonctionnalité désirée qui fonctionna en orbite comme désiré." Alors le sol est capable de descendre par télémétrie le contenu de la mémoire, de télécharger des modifications de mémoire, comme nous l'avons vu plus haut, mais n'est pas capable de télécharger un petit programme en mémoire, et a besoin des astronautes pour ce faire? De plus, si la rentrée du programme est faite manuellement pas les astronautes, ils pourraient facilement faire une erreur qui ferait que le programme ne marcherait pas, et il pourrait męme fonctionner d'une maničre qui aurait des conséquences catastrophiques! Je sais pourquoi le sol a demandé aux astronautes d'entrer manuellement le programme au lieu de le télécharger en mémoire, je le sais, et je vais vous dire pourquoi: C'est parce que le sol aime courir un risque, créer du suspense. Vous savez, le goűt de l'aventure, comme quand Armstrong a aluni alors qu'il restait moins d'une minute de carburant! Le bon vieux suspense hollywoodien! |
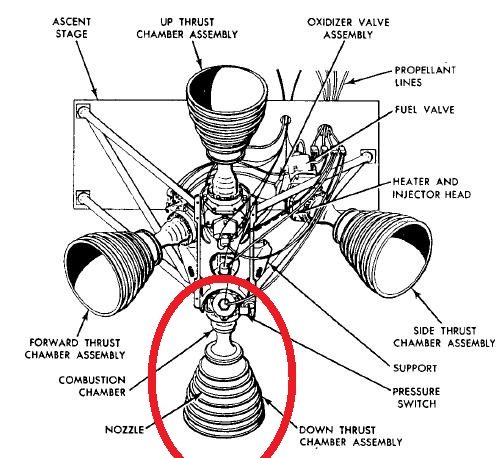
 Ils disent: "The LM ascent powered flight autopilot obtains control torque only by means of the reaction jets. The engine is fixed; it cannot swivel. This control then operated very similarly to the free-fall coasting flight autopilots described above, but with the addition that the system estimates the torque arising from the offset of the main engine thrust from the center of gravity. Controlled limit cycles then will normally operate so that, unless error margins are exceeded, reaction jets will be fired only to oppose the main engine thrust misalignment torque" Soit: "Le vol motorisé de la partie ascendante du module lunaire inclut le contrôle de torque uniquement par les réacteurs latéraux. Le réacteur principal est fixe, il ne peut ętre pivoté. Ce contrôle se fait de la męme maničre par les autopilotes en chute libre décrits au dessus, mais avec l'addition que le systčme estime le torque dérivant du décalage de la poussée du reacteur principal avec le centre de gravité. Des cycles contrôlés de limite opérent normalement de maničre que, ŕ moins que des marges d'erreur sont dépassées, des réacteurs latéraux seront mis ŕ feu seulement pour s'opposer au torque dű au désalignement du réacteur principal de poussée." Le problčme de la partie ascendante du module lunaire est que, différemment de la partie descendante, d'une part les réservoirs de carburant n'étaient pas disposés symétriquement relativement ŕ l'axe du module, ce qui fait que le centre de gravité était excentré, et que, d'autre part, le réacteur principal ne pouvait pas ętre pivoté.  La conséquence est que la poussée du réacteur principal ne pouvait ętre alignée avec le centre de gravité, et avait tendance ŕ faire tourner le module lunaire. Cette rotation devait ętre contrée avec les réacteurs latéraux verticaux. Cela donnait une attitude irréguličre au module lunaire, et gaspillait le carburant des réacteurs latéraux. Cela aurait pu ętre évité en faisant en sorte que la poussée du reacteur principal soit alignée avec le centre de gravité du module. Il n'était męme pas nécessaire que le réacteur principal puisse ętre pivoté pour ce faire, il suffisait juste que les réservoirs de carburant soit disposés symétriquement. Mais les ingénieurs d'Apollo ont fait le pari de ne pas faire les choses rationnellement pour voir si, en dépit du guidage erratique et du gaspillage de carburant, le module lunaire serait encore capable d'effectuer le rendez-vous avec le module de commande. Vous savez, l'épice de l'aventure! |
 Ils disent: "The computer compares estimated spacecraft rate with the desired rate being commanded by the guidance programs. The resulting rate error is integrated and shaped by a seventh order difference equation filter, the output of which command the engine swivel servos". Soit: "L'ordinateur compare le taux estimé du vaisseau spatial avec le taux désiré commandé par le programme de guidage. L'erreur résultante est intégrée et passée dans un filtre d'équation differentielle du septičme ordre, dont le résultat commande les servos du réacteur" C'est une hérésie. Dans le guidage normal, le taux désiré est comparé par le taux réel tel que mesuré par les organes d'acquisitions (gyros a accéléromčtres). Le comparer avec une estimation donnée par un modčle n'a absolument pas de sens et ne peut fonctionner. Ils le font ronfler en utilisant le terme "Equation différentielle du septičme degré", mais cela reste du non-sens. Mais les ingénieurs d'Apollo pensent qu'il est plus important de faire impression que de faire les choses rationnellement. Aprčs tout, Dieu veille sur le module lunaire, n'est-ce pas? |
 Ils disent: "The benefits of this nonlinear control law became particularly evident when it appeared that the total time downward firing jets could operate in the descent configuration was severaly limited because of the danger of burning the descent stage by the jet plume". Soit: "Le bénéfice de ce contrôle non linéaire devient particuličrement évident lorsqu'il apparut que le temps total que les jets pouvaient faire feu vers le bas était sévérement limité ŕ cause du danger de brűler l'étage de descente avec la plume du jet". Ils disent donc que la navigation devrait éviter d'utiliser les réacteurs verticaux orientés vers le bas, parce qu'ils sont susceptibles de brűler le module lunaire! Et s'ils étaient disposés de maničre qu'ils puissent ętre mis ŕ feu sans risquer de brűler le module lunaire? Vous savez, le goűt du danger! |
 Ils disent: "Since the radar antenna and the IMU are mounted at separate locations in the spacecraft, the processing provides for an unknown but assumed constant misalignment between the two and corrects the line-of-sight calculation for a computed estimate of this misalignment". Soit: "Puisque l'antenne du radar et l'IMU sont montés ŕ des emplacements différents dans le vaisseau spatial, le traitement suppose un désalignement inconnu mais constant entre les deux, et corrige le calcul de ligne de visée pour une estimation calculée de ce désalignement". Ils peuvent donc appliquer une correction quoiqu'ils admettent que le désalignement est inconnu! De toute façon, il n'y a pas lieu d'aligner l'IMU avec l'antenne du radar, car les angles mesurés par l'IMU s'appliquent également au radar. l'IMU mesure des angles, pas des distances. Mais les ingénieurs d'Apollo aiment appliquer des corrections qu'ils ont concoctées ŕ leur maničre spéciale. |
 Il disent: "This onboard solution matched the ground tracking solution within a fraction of a foot per second". Soit: "Cette solution locale s'accorda avec la solution de guidage au sol avec un écart de moins d'un pied par seconde". La solution au sol ne peut calculer une trajectoire entičrement en avance, car elle dépend de paramčtres qui sont dynamiquement acquis et ne sont pas connus en avance. Il n'y a pas donc pas lieu de faire cette comparaison. Mais les ingénieurs d'Apollo aiment ŕ faire des comparaisons inadéquates. |
 Ils disent: "The computation capability for the final criticial TPI maneuver to put the LM on an intercept trajectory with the CSM was included in the CM computer program so that this solution was also available. The LM navigation and computation indicated (+19.4, +0.4, -9.7). The CM navigation and computation indicated (+19.6, 0.5, -9.0). The ground tracking solution was (+19.6, +0.1, -10.5)." Soit: "La capacité de calcul pour la maneuvre finale critique TPI pour mettre le LM sur une trajectoire d'interception avec le CSM était incluse dans le programme d'ordinateur du CM de sorte que cette solution était aussi disponible. Le calcul de navigation du LM indiqua (+19.4, +0.4, -9.7). Le calcul de navigation du CM indiqua (+19.6, +0.5, -9.0); la solution du sol était (+19.6, +0.1, -10.5)." Si le LM et le CM font tourner leur porgramme d'ordinateur avec les męmes données, ils devraient obtenir le męme résultat. Si ce n'est pas le cas, cela signifie qu'ils ont fait tourner le programme avec leurs propres données locales. Le sol, de son côté, a obtenu un résultat calculé qui est différent de celui du LM et du CM. Question: Quelles données a utilisé le sol, si ce ne sont ni celles du LM, ni celles du CM? Des données qu'il aurait lui-męme acquises? Impossible, le sol est trop éloigné pour acquérir des données lui-męme, il ne peut qu'utiliser des données transmises depuis le LM ou le CM. Alors, est-ce que le sol a utilisé un mélange des données du LM et du CM pour élaborer ses propres données? Probablement secret de fabrication! |
 Ils disent: "When superposition is achieved, the navigator pushes the mark button which signals the computer to record the navigation angle and time of mark. Using a kalman optimum recursive filter formulation, the computer then determines the state vector change this measurement could cause if incorporated and displays the resultant position and velocity change magnitudes. If the navigator is satisfied subjectively with his mark, he allows the computer to incorporate the state vector change". Soit: "Lorsque la superposition a été réalisée; le navigateur presse le bouton de prise en compte qui signale ŕ l'ordinateur qu'il doit enregistrer l'angle de navigation et le temps de prise en compte. En utilisant une formule de filtrage récursif de kalman optimal, l'ordinateur détermine alors le changement de vecteur d'état que cette mesure provoquerait si incorporée, et affiche la position résultante et le changement de vélocité. Si le navigateur est satisfait subjectivement avec son réglage, il autorise l'ordinateur ŕ incorporer ce changement de vecteur d'état." Comment voulez-vous que l'astronaute fasse un jugement sur le changement de vecteur d'état qui est affiché devant lui? Comment peut-il décider s'il est acceptable ou non? Et que ferait-il de toute maničre? S'il recommence l'alignement, le changement de vecteur d'état restera le męme. Il est donc évident qu'il acceptera toujours l'incorporation du changement de vecteur d'état. Ce n'est pas ŕ l'astronaute de prendre la décision de savoir si le changement du vecteur d'état est correct ou non, c'est ŕ l'ordinateur; si l'ordinateur voit que le changement est trop important, il avertit l'astronaute de refaire sa mesure. Mais les ingénieurs d'Apollo aiment que les astronautes se sentent importants! |
 Ils disent: "Although ground tracking navigation was the primary system, the onboard navigation system had the task of confirming a safe trajectory and providing a backup for return to earth in remote chance that ground assistance became unavailable for onboard use." Soit: "Quoique la navigation au sol soit le systčme primaire, le systčme de navigation de bord avait la tâche de confirmer une trajectoire sűre et de fournir une solution de secours pour le retour vers la terre dans l'éventualité que l'assistance au sol devienne indisponible" Donc ŕ présent l'AGC est capable de faire lui-męme le calcul de trajectoire qui est fait par les ordinateurs sur terre. Les tenants d'Apollo nous ont ressassé qu'il était sans importance que l'ordinateur de bord n'était pas trčs puissant parce que le calcul de la trajectoire était fait par des ordinateurs sur terre, et maintenant, dans ce document, ils nous disent que l'ordinateur de bord était aussi capable de le faire, comme une solution de secours au cas oů l'assistance au sol deviendrait indisponible. C'était donc un ordinateur qui était ŕ la fois trčs puissant et pas puissant du tout. La trčs spéciale logique d'Apollo! |
