A la fin de la descente motorisķe, alors que le module lunaire ķtait prĶs de la surface lunaire, le programme P66 tournait dans l'AGC.
Contrairement aux programmes prķcķdents, ce programme n'ķtait pas entiĶrement automatique, mais seulement semi-automatique.

Le r¶le du programme P66 ķtait de contin¹ment ajuster la poussķe du moteur principal, de sorte qu'il contre exactement l'attraction lunaire, et le module lunaire reste Ó altitude constante alors qu'il se dķplace au-dessus de la surface lunaire.
En effet, au fur et Ó mesure que le module lunaire br¹le du propergol, il perd du poids, et donc la poussķe doit Ļtre modifiķe de sorte qu'elle continue de contrer l'attraction lunaire, mais sans la dķpasser (autrement il monterait, car la force de la poussķe dķpasserait l'attraction lunaire avec un module plus lķger).
Pour faire ses calculs, l'AGC utilise l'information du poids, mais aussi de l'altitude et du taux d'altitude.

Si c'ķtait l'astronaute qui contr¶lait la poussķe avec la manette, il ne serait pas aussi prķcis que l'AGC, car il n'a pas un ordinateur dans la tĻte, et il appliquerait alternativement trop de poussķe ou pas assez, et le module lunaire ne serait pas aussi rķgulier qu'avec le contr¶le par l'AGC; le module lunaire suivrait une trajectoire ressemblant Ó des montagnes russes plut¶t qu'une trajectoire stable.
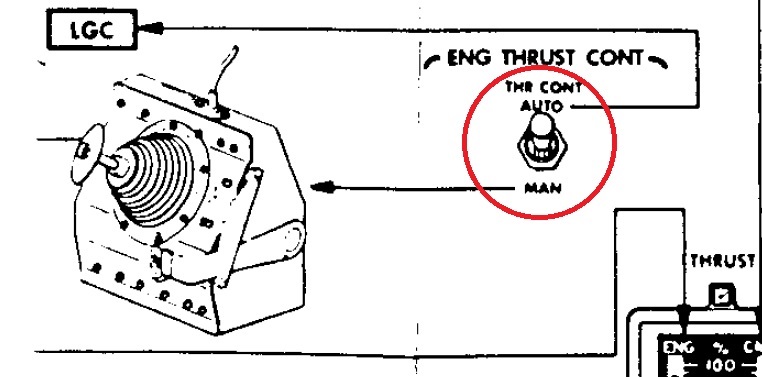
Pendant cette phase, l'interrupteur de contr¶le de la poussķe doit Ļtre sur la position "Auto", ce qui signifie que c'est le LGC (et donc l'AGC qui commande le LGC) qui a entiĶrement le contr¶le de la poussķe, et la manette de contr¶le n'a aucune action dessus.

Mais, si l'astronaute n'a pas le contr¶le du moteur principal, dans cette phase, il a par contre le contr¶le du RCS, ce qui signifie qu'il peut dķplacer le module lunaire au-dessus de la surface lunaire en utilisant les rķacteurs latķraux.
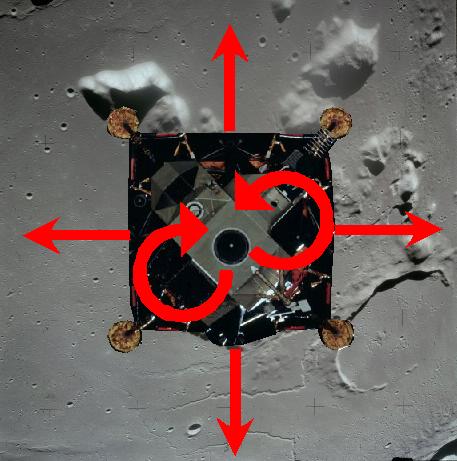
Le RCS permet de dķplacer le RCS dans toutes les directions, et aussi de le tourner dans toutes les directions; en l'absence de friction sur la lune, mĻme une force modeste peut mettre le module lunaire en mouvement, et Ó n'importe quelle vitesse.
Le programme P66 est donc en fait une coopķration entre l'AGC, qui prend en charge le contr¶le du moteur principal, et l'astronaute, qui utilise le RCS pour se dķplacer au-dessus de la surface lunaire.
Le fait que l'AGC s'occupe de la poussķe du moteur principal, et permet au module lunaire de rester Ó altitude constante au-dessus de la lune, permet Ó l'astronaute de se concentrer exclusivement sur le relief de la lune, et dķplacer seulement le module lunaire latķralement sur la surface lunaire.
Lorsque les astronautes ont trouvķ l'endroit adķquat pour poser le module lunaire, il ne peut pas rester sur le programme P66, car celui-ci empĻcherait de descendre le module lunaire.
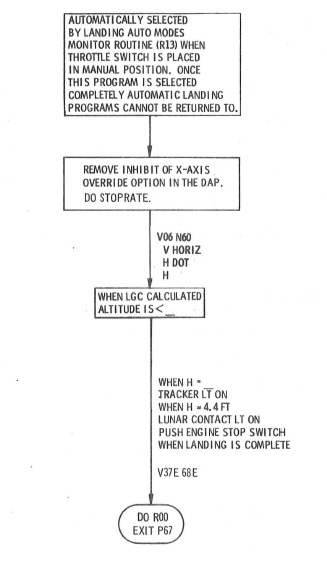
L'astronaute appelle alors le dernier programme de la descente, le programme P67.
Contrairement au programme P66, et les programmes prķcķdents, ce dernier programme n'est pas automatique du tout, il est entiĶrement manuel.
En fait, il consiste juste en instructions donnķes aux astronautes pour rķaliser la descente, car ils la contr¶lent manuellement eux-mĻmes.
Et, lorsqu'ils appellent un programme sur l'AGC, ce n'est pas pour lui demander de les aider Ó contr¶ler la descente, mais seulement pour obtenir des informations qui sont censķes les aider Ó contr¶ler manuellement la descente.
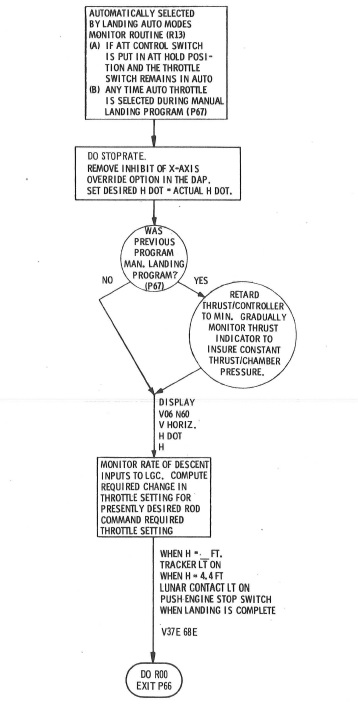
En particulier le programme P67 spķcifie qu'ils doivent appeler la fonction correspondant au verbe 06 et noun 60.

Cette fonction correspond Ó l'affichage pķriodique d'informations horizontales (Z est un axe horizontal du module lunaire, l'axe vertical est appelķ X).
C'est s¹r, des informations horizontales sont trĶs utiles pour contr¶ler verticalement la descente!

Il n'est pas possible de comparer le contr¶le du module lunaire avec celui d'un hķlicoptĶre.
Un hķlicoptĶre contre l'attraction terrestre passivement avec la force de l'air, tandis que le module lunaire contre l'attraction lunaire activement, avec la force de son moteur, et les rķactions sont trĶs diffķrentes.

Ensuite un hķlicotpĶre a une vision bien meilleure du sol en-dessous de lui que le module lunaire.
Et ne pensez pas qu'il serait possible d'utiliser le systĶme d'articulation du moteur principal pour basculer le module lunaire de sorte que les astronautes puissent avoir une meilleure vision du sol sous le module lunaire.

L'usage exclusif du systĶme d'articulation est de refaire l'alignement de la poussķe avec le centre de masse, alors que celui se dķcale progressivement avec la baisse du niveau dans les rķservoirs, alors que le module lunaire br¹le du propergol.
Si le moteur principal ķtait pivotķ avec le systĶme d'articulation pour basculer le module lunaire, et permettre aux astronautes d'avoir une meilleure vision du sol lunaire, il y aurait un dķcalage consķquent entre la ligne de poussķe et le centre de masse, ce qui crķerait un couple de dķsalignement, lequel ferait tourner le module lunaire, et le ferait s'ķcraser sur la lune.
Et, de toute fańon, le systĶme d'articulation ne peut pas Ļtre tournķ autant.

Dans cette derniĶre phase de l'alunissage, l'interrupteur de contr¶le de la poussķe doit Ļtre sur la position "Man", de maniĶre Ó donner le contr¶le de la poussķe Ó la manette de contr¶le au lieu du LGC.
Le problĶme est que, si la position courante de la manette ne correspond pas avec la poussķe courante commandķe par le LGC, ce qui est peu probable, le module lunaire va brutalement soit descendre, soit monter, suivant la position courante de la manette.

L'astronaute, avec la pauvre vision s'il a du sol lunaire, va avoir une grande difficultķ Ó ajuster la poussķe du moteur principal, et appliquera alternativement un poussķe soit trop importante, soit pas assez, et la descente du module lunaire pourrait ressembler au mouvement d'un yoyo.
Et le module lunaire pourrait avoir trop de vitesse lorsqu'il est proche du sol lunaire, ce qui signifie que l'alunissage serait un peu brutal.

Et le contr¶le de la poussķe n'est pas le seul souci des astronautes.
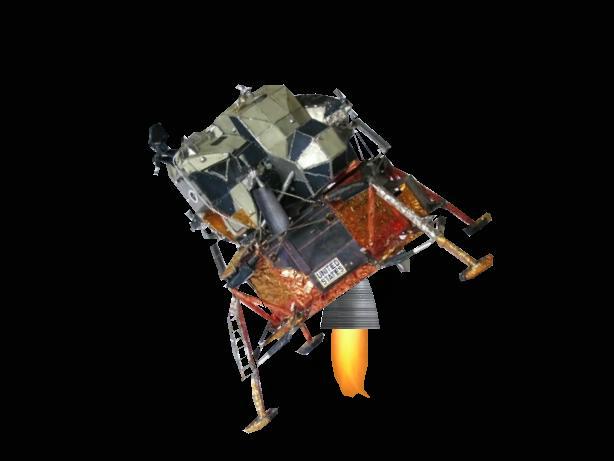
Lorsque les sondes lunaires dķtectent le sol lunaire (Ó 1,7 mĶtre de la surface lunaire), celles-ci ne coupent pas automatiquement le moteur, elles ne font que donner une indication visuelle, et il revient aux astronautes, lorsqu'il voient cette indication visuelle, de couper le moteur en appuyant sur le bouton d'arrĻt.
De plus, la maniĶre dont ce bouton d'arrĻt ķtait conńu ķtait absurde, car il devait faire un aller-retour complet pour effectivement arrĻter le moteur.

Il n'y avait pas de garantie que les astronautes aient coupķ le moteur (en pressant le bouton d'arrĻt) avant que le module lunaire ne touche le sol.
Par exemple, dans Apollo 11, Armstrong a pris un peu de retard pour couper le moteur, et celui-ci fonctionnait encore lorsque le module lunaire reposait sur le sol lunaire.
Heureusement, le module lunaire a bķnķficiķ d'un sol plat dans Apollo 11, et la jupe du moteur ne touchait pas le sol alors que le module lunaire reposait sur le sol.
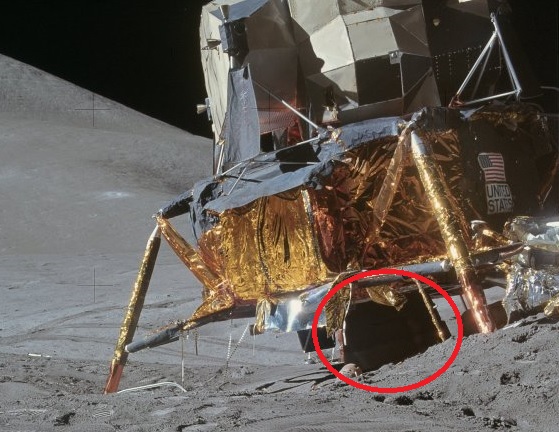
Tel n'ķtait pas le cas dans Apollo 15, dans lequel le module lunaire s'est posķ sur un sol inķgal, et la jupe du moteur a touchķ le sol.
Heureusement, dans cette mission, David Scott a coupķ le moteur avant que le module lunaire ne touche le sol.

Mais, si David Scott avait ķtķ aussi lent qu'Armstrong pour couper le moteur, et que celui-ci avait encore fonctionnķ alors que le module lunaire touchait le sol, cela aurait eu un effet catastrophique dans Apollo 15.

Un hķlicoptĶre n'a pas de tel problĶme, comme ses pales ne touchent pas le sol alors qu'il repose sur le sol, et ses pales peuvent encore tourner alors qu'il se pose.
Le problĶme est que les astronautes n'ont pas de signe prķmoniteur que les lampes de contact vont s'ķclairer, pas de feu orange, ce qui signifie que, ne sachant pas d'avance quand elles vont s'ķclairer, ils doivent constamment concentrer leur attention sur le tableau de bord, ce qui pourrait les distraire de ce qu'ils peuvent voir dehors.
Et, s'ils sont distraits par ce qu'ils voient dehors, ils pourraient ne pas immķdiatement remarquer les lampes de contact.
Et le problĶme est que, alors que ce contr¶le est loin d'Ļtre ķvident, les astronautes n'ont mĻme pas ķtķ formķs sur terre pour le faire, c'est la premiĶre fois qu'ils le font.
En effet, l'entraŅnement qu'ils ont reńu sur terre ķtait beaucoup plus basique, et pas assez sophistiquķ pour les accoutumer Ó faire correctement ce contr¶le.
A cause de la difficultķ pour trouver l'ajustement correct de la poussķe pour faire cette descente, le module lunaire pourrait arriver prĶs du sol lunaire un peu trop vite, et, parce qu'il arrive trop vite, les astronautes pourraient ne pas avoir le temps de presser le bouton d'arrĻt, aprĶs avoir vu s'allumer les lampes de contact, avant que le module lunaire ne touche le sol, un sol qui est inconnu et pourrait Ļtre inķgal.
En d'autres termes, le programme manuel P67 est loin d'Ļtre s¹r!
Rationnellement, le programme P67 n'aurait pas d¹ Ļtre manuel, mais entiĶrement automatique Ó la place.
L'interrupteur de contrpole de la poussķe aurait d¹ rester sur la position "Auto", pour donner le contr¶le de la poussķe au LGC (et donc Ó l'AGC).
L'AGC aurait programmķ la descente de sorte qu'elle aurait ķtķ trĶs rķguliĶre et lente; le module lunaire serait arrivķ prĶs de la surface lunaire avec une vitesse modķrķe; lorsque l'AGC aurait reńu le signal des sondes lunaires, il aurait su que le module lunaire ķtait Ó 1,7 mĶtres de la surface lunaire, et il aurait pu arrĻter le moteur au bon moment.
Le module lunaire se serait posķ en douceur et s¹rement, avec le moteur coupķ alors que le module lunaire reposait sur le sol.
L'alunissage aurait ķtķ totalement s¹r, sans erreur humaine possible.

Car, si les astronautes pourvaient dķmarrer et arrĻter manuellement le moteur (indiquķ en vert), L'AGC pouvait aussi le faire automatiquement (indiquķ en bleu)!
Mais les ingķnieurs ont illogiquement prķfķrķ une procķdure manuelle, qui ķtait loin d'Ļtre s¹re, et qui pouvait ķventuellement se terminer fatalement.

Dans un film, les acteurs peuvent prendre n'importe quel risque, tout aussi insensķ qu'il puisse Ļtre, car il est ķcrit dans le script que tout finira bien.
Mais, dans une mission rķelle, rien n'est ķcrit dans le script, et un risque non nķcessaire peut se terminer en catastrophe.

Maintenant, je sais ce que certains esprits ķclairķs vont me dire: Cela fonctionnait bien avec la descente manuelle, car elle a parfaitement fonctionnķ dans six missions de suite, rappelez-vous, ces astronautes ķtaient de vķritables as!
Oh oui, cela a parfaitement fonctionnķ six fois de suite...sur le plateau de la fausse lune, cela ne peut jamais ķchouer!

