
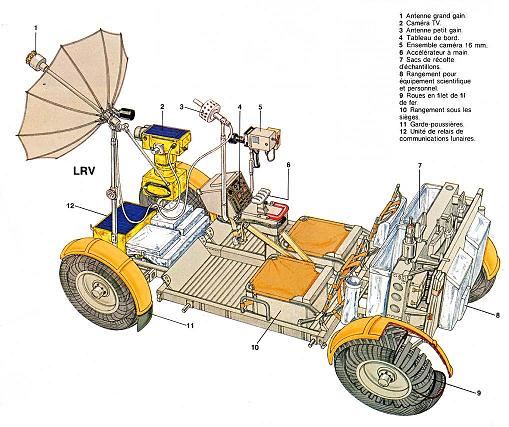
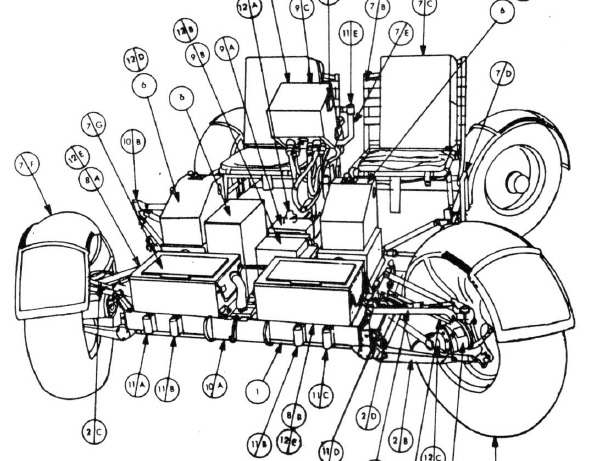
 Cette partie traite du rover lunaire. Elle montre que le rover lunaire d'Apollo est pleine d'incohérences. Lien vers le document de la NASA décrivant le rover lunaire |
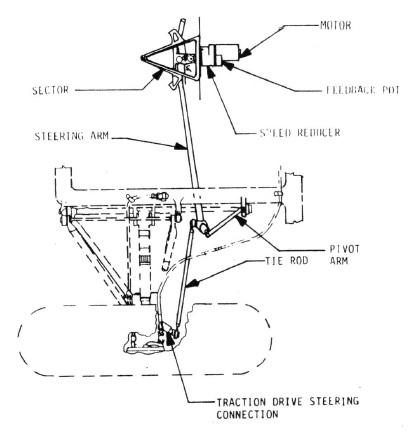
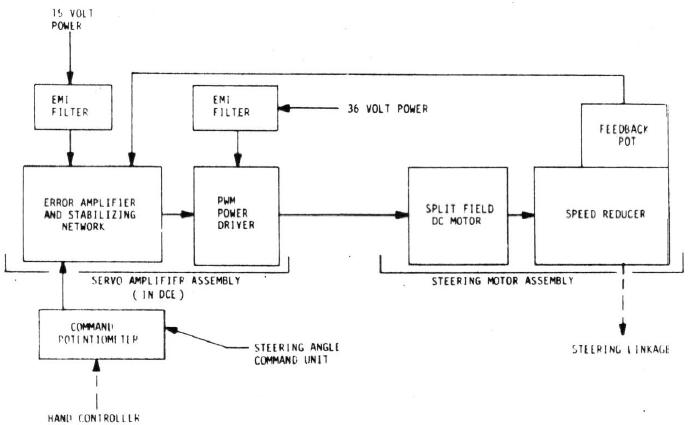 Ceci est le diagramme du bloc de contrôle de braquage. Il montre comment la manette peut agir sur la conduite du rover. |
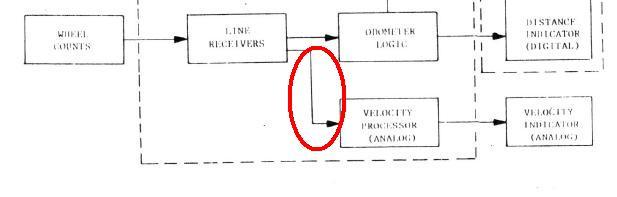
 Mais il y a un problčme, car le retour de la vitesse, qui permet ŕ la commande de déterminer de maničre aussi précise que possible la vitesse désirée, vient du réducteur de vitesse; ceci a pour conséquence que la vitesse résultante sera nettement plus grande que celle désirée. |
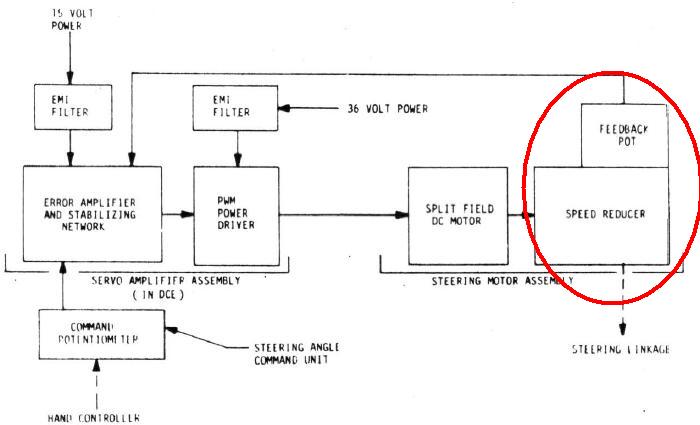
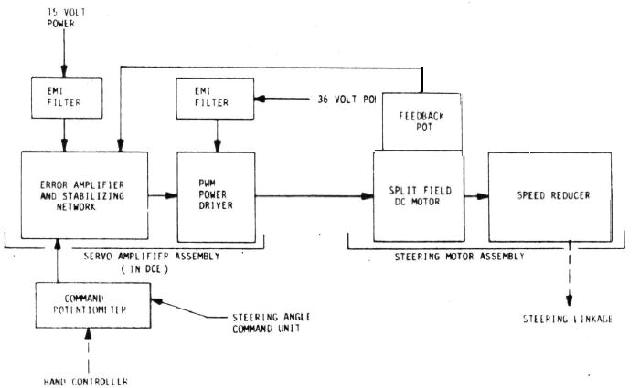 Ceci est la maničre dont cela aurait du ętre connecté: Le retour devrait venir du bloc précédant le réducteur de vitesse, de sorte que la vitesse résultante corresponde effectivement ŕ celle désirée. |
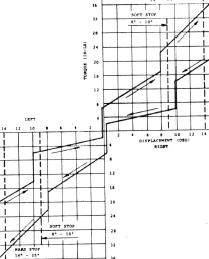 Ce graphe représente le torque requis tour tourner la manette pour le contrôle de braquage; la partie gauche du graphe correspond aux roues tournées ŕ gauche, et la partie droite aux roues tournées ŕ droite; plus les roues sont tournées, et plus grand est l'effort que l'astronaute doit donner pour tourner les roues. |
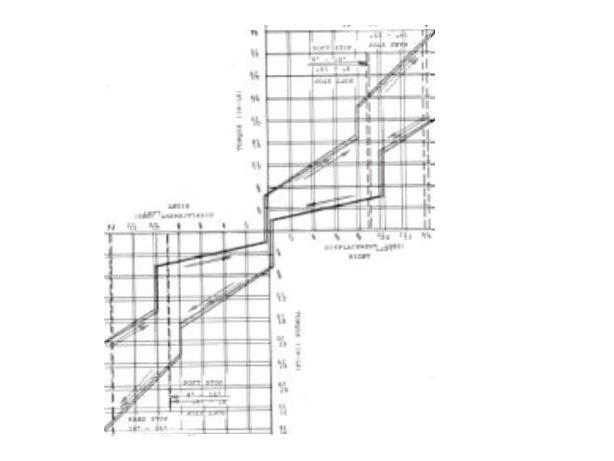 Il y a une symétrie entre les roues tournées ŕ droite et les roues tournées ŕ gauche, car, lorsque j'inverse horizontalement et verticalement le graphe, et que je le superpose avec le graphe original, j'obtiens une bonne superposition. Ce n'est pas surprenant que le braquage réponse de maničre identique lorsque les roues sont tournées ŕ droite ou ŕ gauche. |
 Sur cette partie du graphe des roues tournées ŕ droite, nous voyons que l'effort sur la manette accroît réguličrement avec l'angle des roues, mais il y a une soudaine discontinuité ŕ un moment donné; cette discontinuité vient d'une butée d'arręt placée sur le braquage qui fait que, lorsque le braquage a passé cette butée, il devient plus difficile de tourner les roues; c'est une protection contre le fait de tourner les roues trop brutalement. Mais il y a quelque chose qui semble illogique; la partie du graphe correspondant avec l'astronaute poussant la manette vers la droite (qui correspond ŕ tourner les roues vers la droite) suggére que le braquage devient plus dur un peu avant la butée d'arręt, alors que la partie du graphe correspondant ŕ l'astronaute faisant revenir la manette vers le point neutre suggére au contraire que c'est un peu aprčs la butée d'arręt que le braquage devient plus dur. |
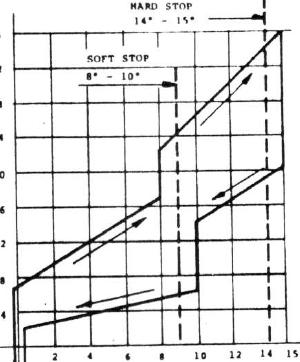
 Ou bien le braquage devient plus dur un peu avant la butée d'arręt, et alors le graphe devrait ressembler ŕ ceci... |
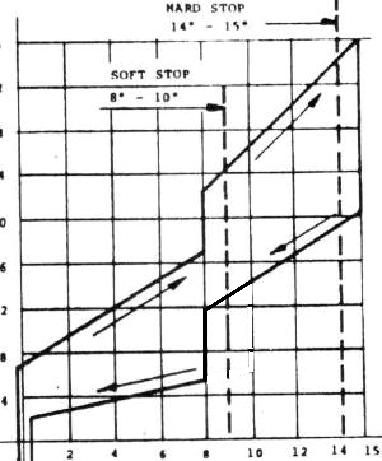
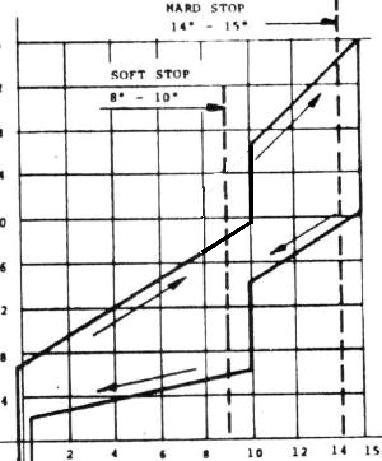 Ou bien le braquage devient plus dur un peu aprčs la butée d'arręt, et alors le graphe devrait ressembler ŕ ceci! |
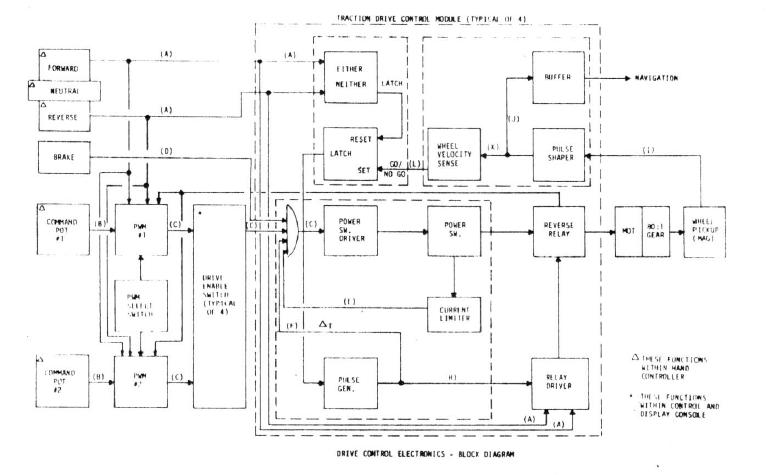 Ceci est le diagramme du bloc de controle électronique de conduite. |
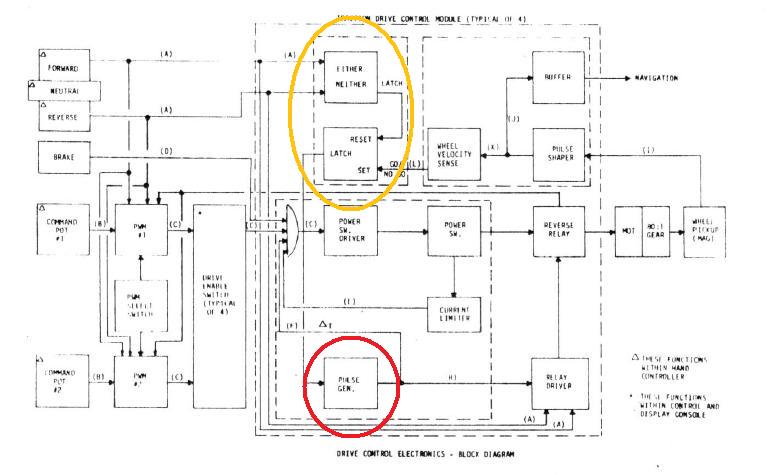 Nous voyons que, lorsque l'astronaute bouge la manette en avant ou en arričre, il y a un petit délai appliqué (par le bloc cerclé de rouge) avant de prendre en compte la commande. Mais en fait ce délai ne sert ŕ rien; supposez que le rover soit en train d'avancer, et l'astronaute bouge soudain la manette d'avant en arričre; męme aprčs ce délai, le rover sera encore en train d'avancer, et la commande de recul sera appliquée alors que le rover est en marche avant; tout le monde sait que ce genre de situation est trčs mauvais, que se mettre en marche arričre alors que la voiture roule en avant est catastrophique et peut tuer le moteur. Bien sűr, vous me direz que l'astronaute devrait ętre assez intelligent pour savoir qu'il ne doit pas bouger la manette d'avant en arričre alors que le rover roule, mais il peut le faire de maničre non intentionnelle, par exemple si le rover roule sur un nid de poule, et l'astronaute est secoué et ne contrôle pas sa main ŕ ce moment lŕ. Il devrait donc y avoir une protection contre une telle situation qui fait qu'une commande involontaire de l'astronaute ne génére pas de risque pour le rover. |
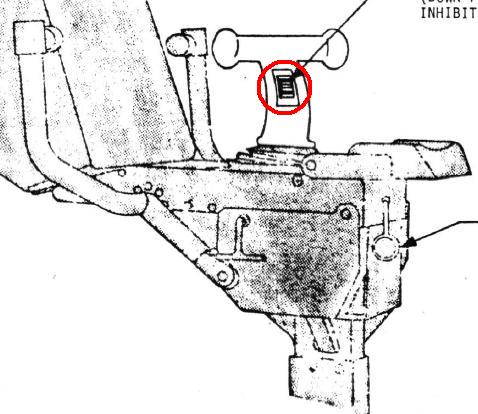 Bien sűr il y avait un commutateur d'inhibition sur la manette qui permettait d'interdire de mettre la manette en position arričre alors que le rover s'avançait, mais voyez comme il est incommode; il est pratiquement non accessible ŕ l'astronaute avec ses gants pressurisés, il doit avoir la plus grande difficulté ŕ le manipuler; il peut donc décider de ne pas l'utiliser; męme s'il arrive ŕ le changer de position, il peut aussi oublier de le remettre en position de bloquage aprčs une maneuvre arričre. De plus, alors que l'astronaute est en train de faire une maneuvre arričre, il pourrait aussi involontairement pousser la manette en avant, et le fait d'appliquer une marche avant alors que le rover recule est également mauvais. De tout ceci, il résulte qu'il est nécessaire que l'électronique empčche d'appliquer une marche arričre alors que le rover est en train de s'avancer, ou vice versa d'appliquer une marche avant alors que le rover est en train de reculer. Est-ce possible? Oui, c'est possible, et je vais vous montrer un schéma qui permet d'empčcher l'application d'une marche arričre alors que le rover s'avance, ou inversement d'appliquer une marche avant alors que le rover recule. |
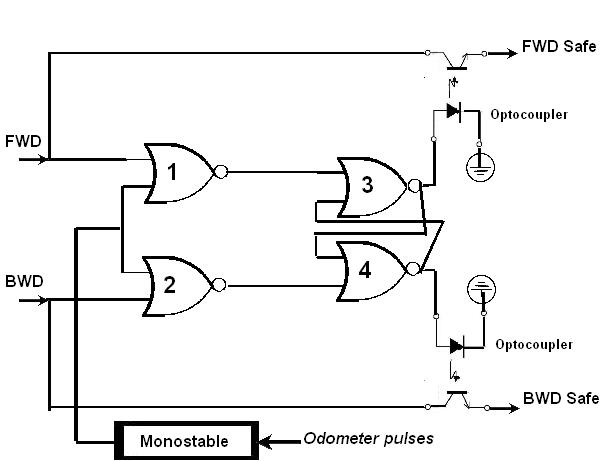 Cette interface permettrait d'apporter la protection qui manque dans le bloc de contrôle électronique. Les impulsions odométriques qui sont générées lorsque les roues tournent rentrent dans un circuit monostable qui permet de les convertir en un signal permanent qui est haut lorsque les roues tournent, et bas lorsque le rover est arręté, ou presque. La sortie du monostable rentre dans des circuits NOR (numérotés 1 et 2) dans lesquels les commandes d'avance et recul rentrent également; lorsque le rover est ŕ l'arręt, la sortie du monostable est ŕ 0, et permet alors aux commandes d'avance et recul de sortir sur les circuits 1 et 2; les sorties de ces circuits commandent une bascule constituée avec les circuits NOR 3 et 4; lorsque le rover est arrętée, les sorties des circuits 3 et 4 reflčtent les états courants des commandes d'avance et de recul; mais, lorsque le rover roule, les sorties des circuits 1 et 2 sont forcées ŕ 0, quelque soit l'état des commandes d'avance et de recul, et ceci force la bascule en mode mémorisé; si la manette était en avant ŕ l'arręt, la sortie du circuit 3 est ŕ 1, et la sortie du circuit 4 est ŕ 0; si la manette est mise en marche arričre alors que le rover roule, comme la bascule est forcée en mode mémorisé, la sortie du circuit 3 (corespondant ŕ la commande d'avance) sera encore ŕ 1, et la sortie du circuit 4 (correspondant ŕ la commande de recul) sera encore ŕ 0; ces sorties commandent des optocoupleurs qui laissent passer le signal lorsqu'ils sont activés, et le bloquent lorsqu'ils ne le sont pas; comme la sortie mémorisée d'avance du circuit 3 est ŕ 1, elle laisse passer la commande d'avance ŕ travers son optocoupleur, et, comme la sortie mémorisée de recul du circuit 4 est ŕ 0, elle bloque le signal de recul ŕ travers son optocoupleur; męme si l'astronaute place la manette en position arričre alors que le rover roule, la logique de la bascule bloquera la commande de recul qui ne peut ętre appliquée aussi longtemps que le rover roule; c'est seulement lorsque le rover s'arręte que la sortie du monostable cesse de forcer la mémorisation des commandes d'avance et de recul, et alors la sortie du circut 4 peut prendre l'état actuel de la commande de recul et débloquer l'optocoupleur qu'elle commande pour laisser passer la commande de recul: A présent la commande de recul peut ętre appliquée et faire reculer le rover. Cela fonctionne de męme si le rover recule et la manette est placée en marche avant. Si nécessaire, une redondance peut ętre ajoutée pou rajouter de la sécurité. Cette interface aurait permis de complétement sécuriser le changement de marche avant en marche arričre, ou vice versa, quelque soient les mauvaises maneuvres de l'astronaute. |
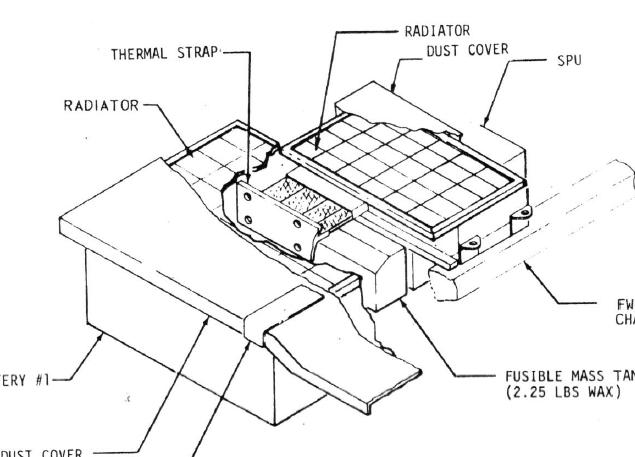 Ils placent une protection contre la poussičre sur les batteries alors que le rover roule afin d'empčcher la poussičre lunaire de venir sur la surface des batteries; ils enlčvent seulement cette protection quand le rover est parqué prčs du module lunaire, afin de permettre la recharge des batteries. Mais cela n'a pas de sens: Sur la lune, différemment de la terre, la poussičre ne peut pas tourbillonner, et il n'y a donc pas de raison que la poussičre vienne sur les batteries; d'un autre côté, laisser les batteries exposées au soleil permettrait de recharger un peu les batteries alors que le rover roule et accroîtrait donc la portée du rover. |
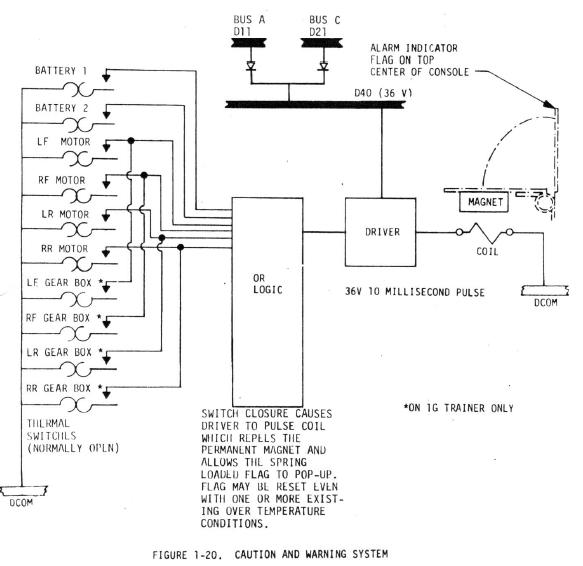 Ceci est le systčme d'avertissement de défaut du rover. |
Lorsqu'un défaut se produit, il passe ŕ travers une porte OU et génére une pulsation ŕ travers un générateur de pulsation qui permet d'exciter une bobine qui relache magnétiquement un ressort et libére une plaque d'avertissement. Tout défaut peut libérer la plaque d'avertissement. |
 La plaque d'avertissement apparaît sur le haut de la console de visualisation et contrôle du rover, et avertit l'astronaute qu'un défaut s'est produit. L'astronaute peut remettre la plaque en place avant que le défaut ait disparu, car la pulsation libérant la plaque ne se produit qu'une fois lorsque le signal de défaut passe ŕ l'état haut; il ne peut ętre regénéré aussi longtemps que le signal de défaut reste ŕ l'état haut; le signal de défaut doit d'abord repasser ŕ l'état bas pour pouvoir regénérer une pulsation lorsqu'il repasse ŕ l'état haut. |
Alors, quel sont les problčmes avec ce systčme d'avertissement? Vous voyez d'abord que certains défauts csont connectés ensemble; ils ne devraient pas ętre connectés ensemble; tous les défauts devraient individuellement rentrer dans la porte OU. |
 Ce systčme a aussi un sérieux défaut. Supposez que le premier défaut persiste et ne disparaisse pas. Il continuera de forcer la porte OU ŕ un état haut. Voilŕ que survient un autre défaut; comme la sortie de la porte OU est déjŕ ŕ l'état haut ŕ cause de la persistance du premier défaut, cela ne générera pas de changement sur la porte OU; et si la sortie de la porte OU ne change pas, cela ne genéréra pas de pulsation permettant de libérer la plaque d'avertissement, et l'astronaute ne sera pas averti de l'occurence d'un nouveau défaut. Est-ce que ce systčme peut ętre amélioré? Oui, absolument, il le peut! |
 A présent, si, au lieu de connecter le générateur d'impulsion ŕ la sortie de la porte OU, un générateur d'impulsion est individuellement connecté ŕ chaque sortie de défaut et que la sortie de la porte OU est directement connectée ŕ la bobine, cela peut corriger ce problčme. Comment? |
 Si un premier défaut se produit, il générera une impulsion ŕ travers son générateur d'impulsion, et cette impulsion passera ŕ travers la porte OU et commandera le relachement du ressort, et la libération de la plaque d'avertissement, ce qui avertit l'astronaute du défaut. Mais, allez-vous le dire, le systčme précédent pouvait déjŕ le faire! |
 A présent, c'est lŕ que cela devient intéressant. Le défaut original n'a pas disparu et persiste; mais il a seulement généré un impulsion sur la sortie de son générateur d'impulsion qui a permis la premičre libération de la plaque d'avertissement. Aprčs l'impulsion, la sortie du générateur d'impulsion est revenue ŕ zéro, et ne force dont plus la sortie de la porte OU ŕ 1. Voilŕ qu'arrive un autre défaut; ce nouveau défaut génére une impulsion sur son propre générateur d'impulsion; parce que la sortie du générateur d'impulsion du premier défaut est couramment ŕ 0, elle n'empčche pas l'impulsion du nouveau défaut de passer ŕ travers la porte OU et d'activer la bobine; la plaque d'avertissement est ŕ nouveau libérée et peut avertir l'astronaute de l'occurence d'un nouveau défaut. Donc, au contraire du systčme précédent, ce systčme modifié n'empčche pas l'astronaute d'ętre prévenu d'un nouveau défaut en cas de persistance du défaut précédent. Il est définitivement meilleur, et aurait du ętre conçu de cette maničre. |
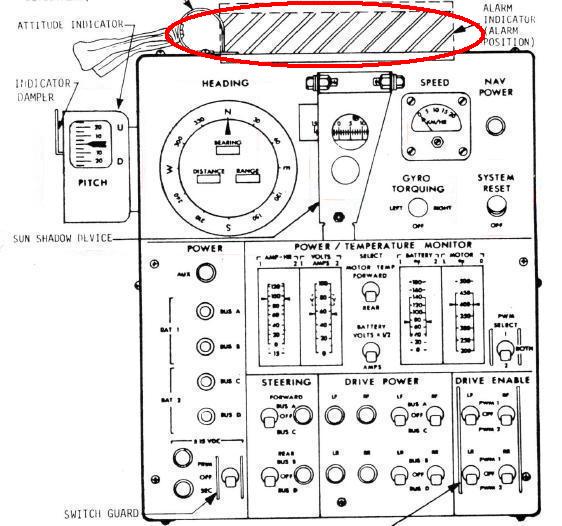
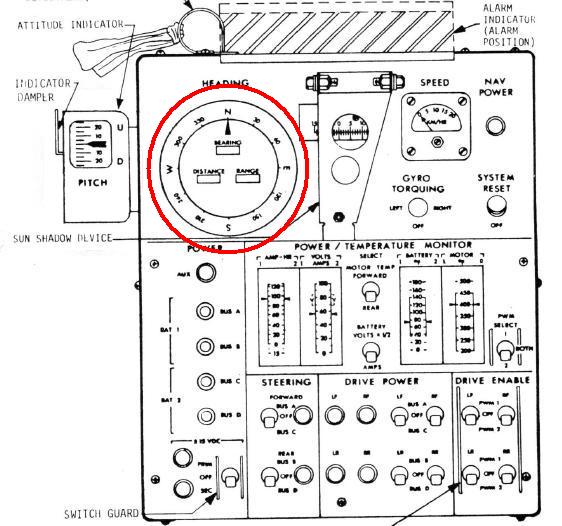
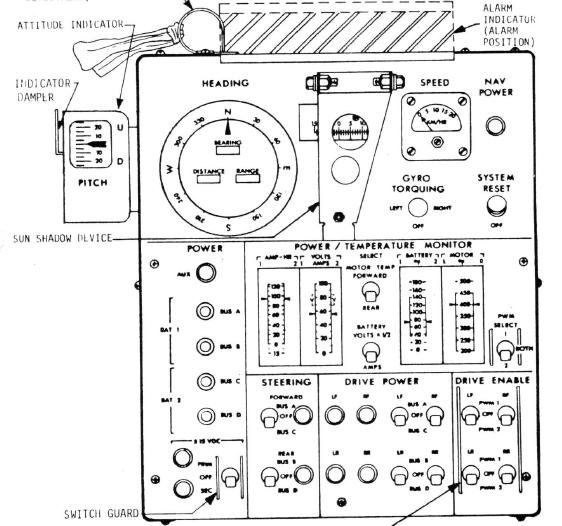 La console de visualisation et contrôle permet ŕ l'astronaute de piloter le rover. |
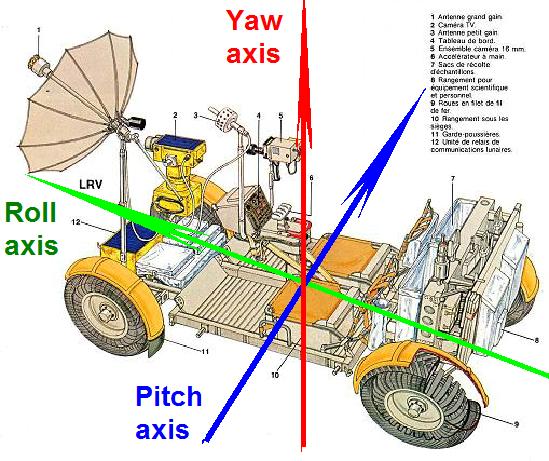
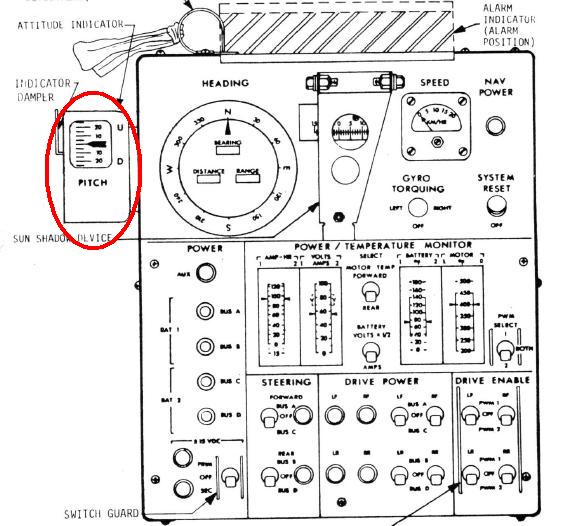 Sur le côté gauche de la console, il y a un indicateur d'angle qui permet d'informer l'astronaute sur les angles du rover autour des axes horizontaux. |
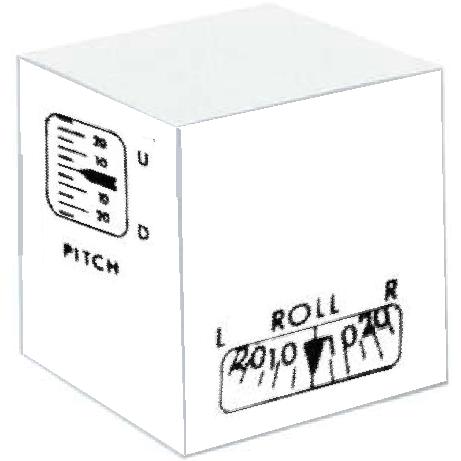 Cet indicateur est une boîte contenant deux systčmes de mesure d'angle qui sont placés perpendiculairement l'un ŕ l'autre. |
 Ces systčmes de mesure d'angle utilisent le principe du pendule pour fonctionner; ils utilisent la gravité lunaire pour connaître la verticale exacte. Ils sont bien sűr plus sophistiqués que ce que je montre ici, qui a seulement pour but d'expliquer le principe de la mesure. Ces systčmes mesurent l'angle de rotation autour de l'axe qui est perpendiculaire ŕ leur plan, et c'est pourquoi ils sont placés perpendiculairement l'un ŕ l'autre. L'angle de roulis (roll) est l'angle de rotation autour l'axe longitudinal du rover, et l'angle de tangage (pitch) est l'angle de rotation autour de l'axe horizontal qui lui est perpendiculaire. |
 Normalement, l'indicateur est orienté de maničre que l'astronaute puisse lire l'angle de roulis en face de lui, s'il regarde sur la côté gauche, il peut lire l'angle de tangage, mais cela ne lui est pas trčs commode, pour ne pas dire impossible. |
 C'est pourquoi l'astronaute a la possibilité de tourner manuellement cet indicateur d'un quart de tour dans le sens inverse des aiguilles d'une montre, de sorte qu'il puisse lire l'angle de tangage ŕ la place. Mais c'est ridicule, s'il tourne l'indicateur d'un quart de tour, les deux systčmes de mesure vont aussi ętre tournés d'un quart de tour, ce qui signifie que celui qui est sensé mesurer l'angle de roulis mesurera en fait l'angle de tangage, et vice versa. Quoique la mesure d'angle que l'astronaute a en face de lui s'appelle ŕ présent "tangage" (Pitch), c'est encore un angle de roulis que l'astronaute lit. Le fait de tourner l'indicateur ne change rien; si l'astronaute veut vraiment connaître l'angle de tangage, la seule solution est qu'il regarde sur le côté de l'indicateur alors qu'il est en position normale...Ce qui lui est presque impossible. La documentation dit que les angles de roulis en tangage sont envoyés au systčme de navigation afin de permettre sa mise ŕ jour; mais, si l'astronaute tourne l'indicateur, non seulement cela ne lui permettra toujours pas de lire l'angle de tangage, mais de plus la navigation interprétera faussement les angles et utilisera l'angle de tangage ŕ la place de l'angle de roulis et vice versa, puisque la rotation de l'indicateur est purement manuelle, et le systčme de navigation n'est pas informé de sa rotation, et ne sait donc pas que les angles sont échangés! |
 De toute façon, les angles de roulis et tangage ne sont pas vraiment utiles au systčme de navigation si le gyroscope est stabilisé horizontalement. Donc, normalement, le gyroscope devrait donner une variation d'angle relative ŕ la vraie verticale, et non la verticale du rover, ce qui signifie que les angles de roulis et tangage ne sont pas nécessaires pour la mise ŕ jour de la navigation. Le seul intéręt des angles de roulis et tangage pourrait éventuellement d'étudier comment le terrain lunaire est accidenté, mais c'est un intéręt trčs limité, puisqu'ils vont continuellement changer avec le terrain, męme si le rover va tout droit. |
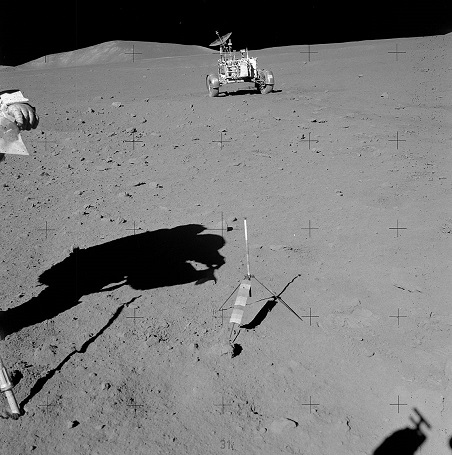
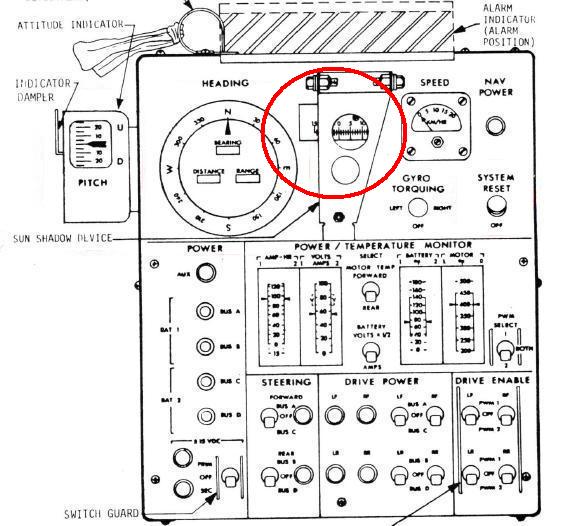 Sur la console de visualisation, il y a aussi un instrument spécial (que j'ai cerclé) appelé "détecteur d'ombre solaire" (sun shadow device). |
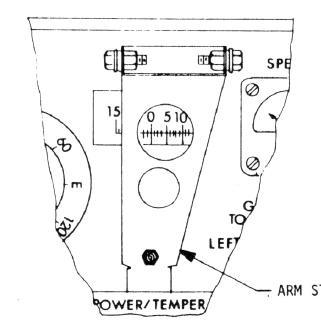 Cet instrument permet de mesurer la position de l'ombre du soleil sur une régle graduée, ŕ condition que le soleil soit pratiquement dans le dos du rover, ce qui permettrait de mettre ŕ jour le systčme de navigation. Mais l'orientation du rover relativement au soleil ne permet en aucun cas de connaître l'orientation du rover relativement au module lunaire, et n'a aucun rapport avec. Je vais illustrer ceci sur deux exemples. |
 Sur ce premier exemple, le rover tourne autour du module lunaire; la direction du module lunaire est constamment perpendiculaire ŕ l'axe du rover tout au long du tour; donc l'orientation du rover relativement au module lunaire ne change pas tout au long du tour; pourtant l'orientation du rover relativement au soleil change constamment tout au long du tour. |
 Sur ce second exemple, le rover va tout droit, et donc son orientation ne change pas relativement au soleil. Mais son orientation relativement au module lunaire ne cesse de changer. |
C'est pourquoi la mesure de l'ombre solaire n'aide en aucune maničre ŕ mettre ŕ jour l'orientation du rover relativement au module lunaire, et n'est d'aucune utilité pour la navigation. |
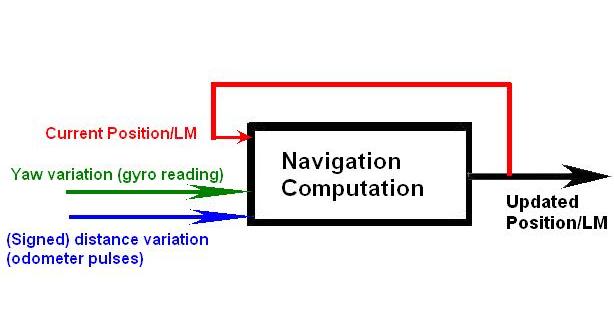 Le systčme de navigation marche de la maničre suivante: Connaissant la position courante relativement au module lunaire, c'est ŕ dire l'orientation du module lunaire relativement au rover, et la distance de du module au rover, la navigation met constamment ŕ jour cette position en utilisant la lecture du gyro qui informe sur la variation d'angle autour de l'axe vertical, et la variation de distance obtenue en comptant les impulsions odométriques, afin de calculer une nouvelle position du module lunaire. Lorsque les roues tournent, elles générent ce qui est appelé des impulsions odométriques; chaque roue génére un certain nombre d'impulsions odométriques par tour; de maničre ŕ connaître la distance dont une roue a roulé, les impulsions odométriques qui ont été produites durant cette distance sont comptées, et ce compte est multiplié par la circonférence de la roue et divisé par le nombre d'impulsions odométriques par tour de roue; la mesure de la vitesse se fait en comptant le nombre d'impulsions odométriques sur une période donnée; plus il y a d'impulsions odométriques dans cette période donnée, et plus le rover va vite. |
 L'indicateur de direction informe sur la position de rover relativement au module lunaire. |
Le systčme de navigation permet de mettre ŕ jour la position du module lunaire et donc aussi de mettre ŕ jour l'indicateur de direction. Mais le systčme de navigation ne doit pas seulement connaître la variation de distance du rover, mais aussi la direction de cette variation (i.e la variation de distance doit ętre signée). |
 Partons de cette position du rover relativement au module lunaire. |
 Vous voyez que, si le rover va tout droit de la męme distance en avant ou en arričre, la nouvelle orientation du rover relativement au module lunaire n'est pas la męme dans les deux cas; c'est pourquoi le systčme de navigation a besoin de savoir, non seulement la distance dont le rover a roulé, mais aussi dans quelle direction. |
 Pourtant ils disent ceci dans la navigation: "La logique de l'odomčtre ne permet pas de distinguer entre les rotations avant et arričre de la roue; donc une marche arričre du rover ajoute des pulses odométriques". Ceci signifie que la variation de distance est absolue et non signée. |
 La premičre conséquence de ceci est que, si le rover ne cesse de rouler en avant et en arričre, cela peut faire croire que le rover est loin du module lunaire alors qu'il en est prčs, puisque la distance est comptée de la męme maničre lorsque le rover recule que lorsqu'elle avance. |
Mais il y a une conséquence plus ennuyeuse qui est que cela falsifiera la mise ŕ jour de l'orientation du rover relativement au module lunaire. Et le fait d'avoir une orientation fausse relativement au module lunaire est plus problématique que d'avoir une distance au module fausse. |
 En effet, si l'astronaute pense que le module est plus prčs qu'il ne l'est réellement, mais va dans la bonne direction, aprčs qu'il ait atteint le point oů il pensait trouver le module, peut-ętre qu'il ne le trouvera pas, mais il s'en sera quand męme rapproché, et, s'il persiste dans cette direction, il finira pas le trouver; éventuellement, aprčs avoir atteint le point oů il pensait le trouver, il peut l'avoir en vue. |
 D'un autre côté, si l'astronaute part ŕ pied dans la mauvaise direction, non seulement il ne trouvera pas le module lorsqu'il atteint le point oů il pensait le trouver, mais de plus il se sera éloigné du module, et s'il persiste dans la mauvaise direction, qu'il pense ętre la bonne, il s'éloignera de plus en plus du module lunaire, et ne le trouvera jamais; cela se terminera tragiquement pour lui. |
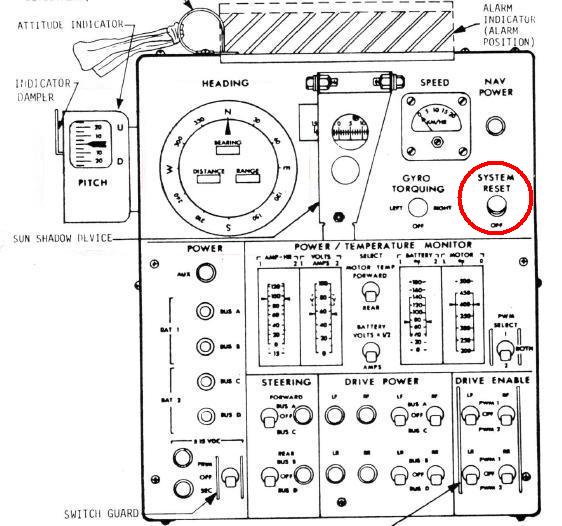 Les astronautes avaient un bouton de remise ŕ zéro (reset) pour initialiser le systčme de navigation au début de la mission. Ce bouton mettait tous les paramčtres ŕ zéro. Le problčme est qu'ils pouvaient presser ce bouton ŕ tout moment ce la mission, il n'y avait pas de protection contre son utilisation au cours de la mission; pourtant, s'ils utilisent ce bouton au cours de la mission, la navigation perdra ses données courantes, et deviendra incapable de faire une mise ŕ jour correcte ŕ partir de ce moment, car la navigation met ŕ jour une nouvelle position ŕ partir d'une position précédente. |
Il n'était pas impossible que le systčme de navigation ait une perte d'alimentation au cours de l'EVA. Dans un tel cas, la console de visualisation continuait d'afficher la derničre information disponible au moment de la perte d'alimentation. Si la perte d'alimentation était permanente, le systčme de navigation devenait bien sűr inopérationel, mais, si c'était seulement une perte temporaire, et que le rover bougeait durant cette perte d'alimentation, lorsque l'alimentation revenait, le systčme de navigation utilisait des données qui n'étaient plus ŕ jour. Dans ce cas, le systčme de navigation devait ętre réinitialisé (et c'est aussi le cas si les astronautes pressent le bouton de remise ŕ zéro). Dans la documentation, ils disent que le rover devait rouler sur 50 mčtres aprčs le début de la réinitialisation avant que les données de navigation redeviennent valides. Imaginez donc que le rover ait un problčme qui fait qu'il ne peut plus bouger ŕ ce moment précis? Si les astronautes doivent revenir ŕ pied au module lunaire, ils doivent savoir dans quelle direction est le module lunaire, sinon ils pourraient se trouver incapables d'y revenir. Mais le rover doit rouler sur 50 mčtres avant que le systčme de navigation donne une indication valide, et il ne le peut pas. |
 Alors que vont faire les astronautes? Porter le rover sur 50 mčtres jusqu'ŕ ce que le systčme de navigation donne des indications valides? |
 Mais les roues du rover doivent probablement avoir un contact avec le sol, alors les astronautes vont pousser le rover sur 50 mčtres. |
Soyons sérieux; si le systčme de navigation a perdu une référence valide, il n'y a pas moyen qu'il puisse l'acquérir ŕ nouveau par lui męme; aprčs avour roulé sur 50 mčtres, le systčme de navigation aura fait une mise ŕ jour ŕ partir d'une référence invalide, et aura encore une référence invalide. |
 La seule maničre de réinitialiser le systčme de navigation serait de lui fournir une référence valide. La seule solution serait de faire émettre un signal par une antenne, et d'orienter l'antenne jusqu'ŕ obtenir le meilleur signal en retour depuis le module lunaire; la distance du module pourrait ętre acquise en mesurant le délai entre le signal émis et le signal reçu. |
 Mais, et c'est lŕ tout le problčme, le systčme de navigation est incapable d'orienter les antennes par lui-męme. Les deux antennes sont orientées manuellement par les astronautes. Ils ont prévu des commandes de rotation automatique pour la caméra, mais ils n'ont rien prévu pour les antennes. Pourtant le fait de permettre la rotation commandée des antennes aurait permis, non seulement de les orienter automatiquement de maničre ŕ toujours avoir la meilleure réception, mais aurait aussi permis de faire une réinitialisation du systčme de navigation, et ceci est essentiel pour la sécurité des astronautes, car, s'ils ne savent pas oů se trouve le module lunaire, et sont incapables d'y retourner, cela pourrait signifier la mort pour eux. Mais envoyer des images vers la terre est plus important que leur sécurité, n'est-ce pas? Donc, la réinitialisation du systčme en navigation nécessiterait la coopération des astronautes, et, męme si cela pouvait fonctionner de cette maničre, une fois trouvée la meilleure orientation, le systčme de navigation aurait encore besoin de savoir l'orientation courante de l'antenne, ce qu'il ne peut; alors, est-ce que l'astronaute va utiliser son sextant pour trouver cette orientation et donner sa mesure au systčme de navigation? Soyons sérieux, une fois que le systčme de navigation a perdu sa référence, il n'y a pas moyen qu'il puisse la recouvrer, parce que rien n'a été prévu dans ce cas. |
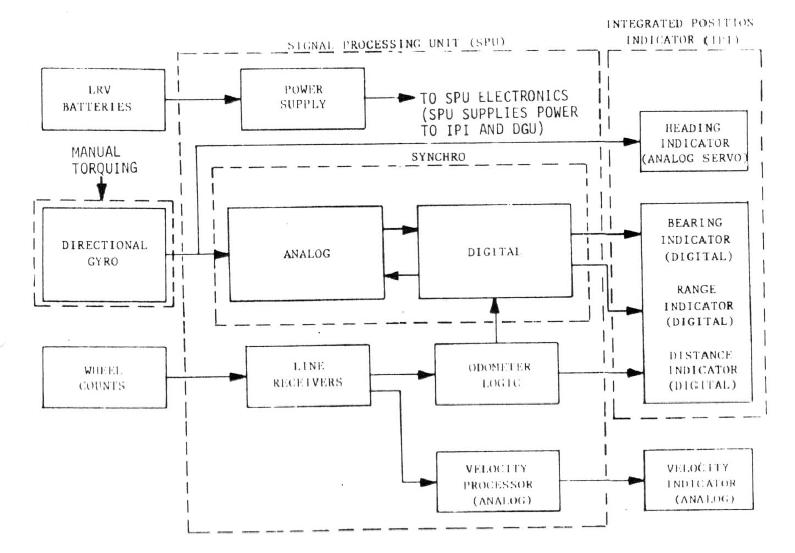
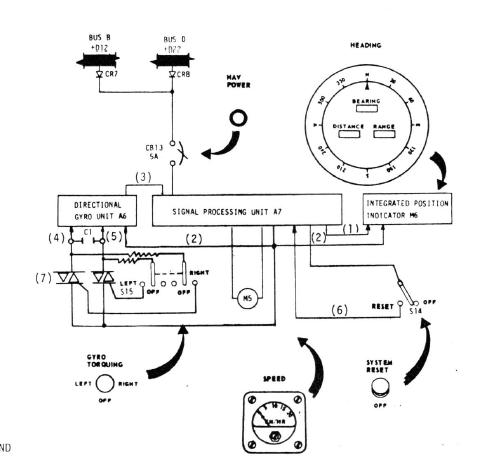
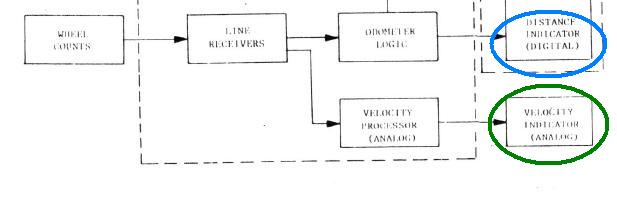 Ceci est la partie du sous-systčme de navigation qui concerne la gestion des roues. Elle permet de mettre ŕ jour les indicateurs de distance et vitesse. |
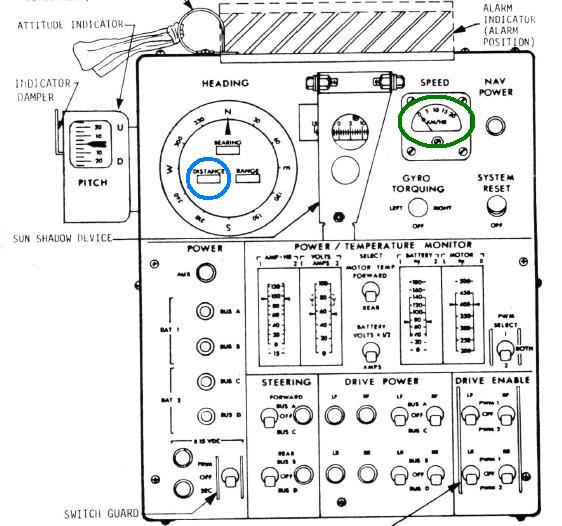 J'ai cerclé en bleu l'indicateur de distance, et en vert l'indicateur de vitesse sur la console de visualisation. |
 J'ai expliqué que la mesure de la vitesse se faisait en comptant les pulses odométriques sur une période donnée. Donc le bloc de velocité devrait logiquement ętre relié au bloc de la logique odométrique. Au lieu de cela, il est relié au bloc précédent qui ne donne pas d'information relative aux impulsions odométriques. |
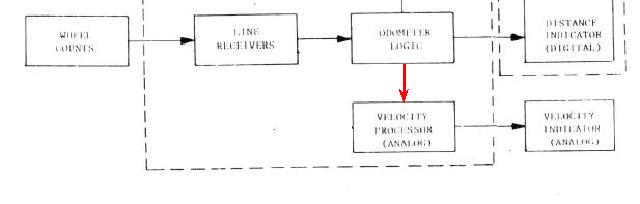 Ceci est la maničre dont le bloc de velocité aurait du ętre relié, c'est ŕ dire au bloc de la logique odométrique, de maničre ŕ recevoir les impulsions odométriques qui lui permettent la mesure de la vitesse. |
 Ils disent que le systčme de navigation met ŕ jour des comptes séparés dans les accumulateurs de nord et d'est. Mais il ne peut fonctionner de cette maničre: Le systčme de navigation met ŕ jour l'orientation relativement au module lunaire; aprčs il peut éventuellement utiliser cette orientation pour mettre ŕ jour des indications nord et est. |
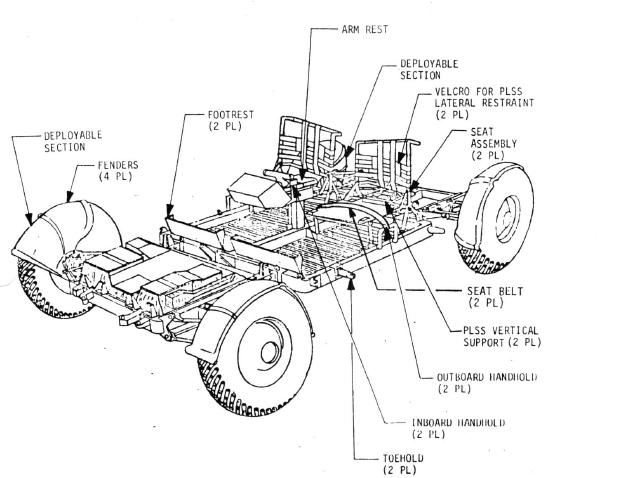 A propos des composants de l'équipage, ils disent ceci: "Le dos du sičge comprend une découpe permettant l'accčs aux valves de controle du sac de survie (PLSS) et comprend des facilités pour le maintien vertical du PLSS" |
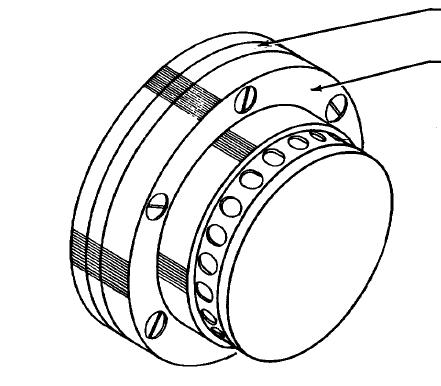
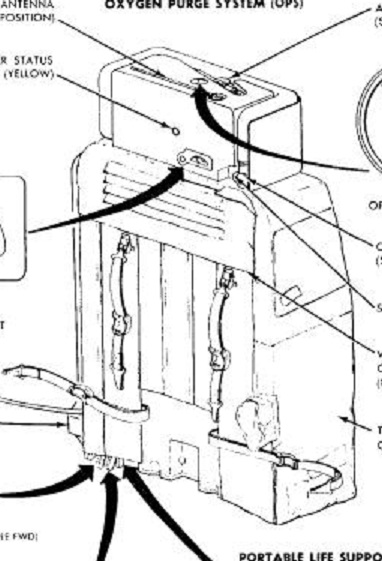 Ces valves manuelles, qui sont prévues en cas de panne des valves automatiques de régulation, sont situées en bas et ŕ gauche du sac de survie, ŕ l'endroit indiqué par les flčches. |
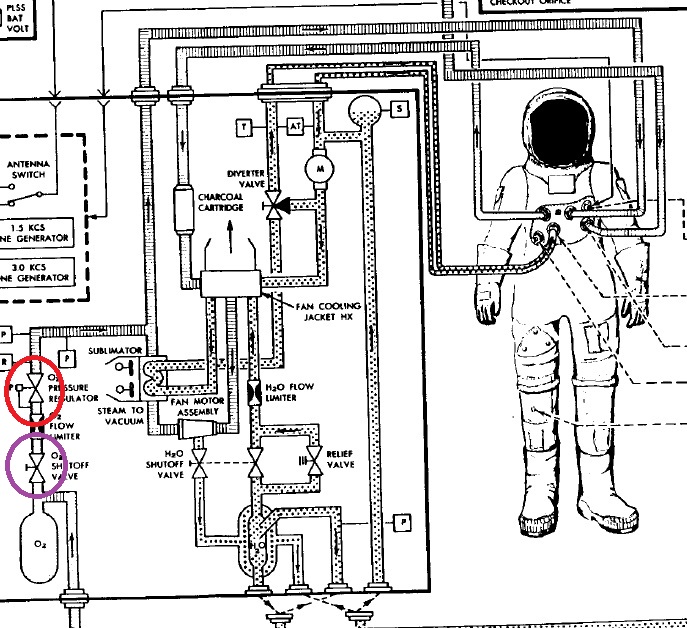 Par exemple, il y a une valve automatique de régulation qui s'ouvre lorsque la pression d'oxygčne descend en dessous d'une certaine valeur, et se ferme lorsqu'elle dépasse une autre valeur. Mais il est possible que la valve de régulation automatique ait un problčme et ne se ferme pas quand elle le devrait; comme conséquence cela peut générer une surpression que l'astronaute peut lire sur la jauge placée sur son bras. La solution pour résoudre ce cas est que l'astronaute referme la valve manuelle afin de bloquer l'entrée de l'oxygčne et arręter la surpression avant qu'elle ne provoque un accident fatal. |
Cette valve est une des valves situées en dessous du sac de survie. |
 L'astronaute a une valve re relachement de pression située sur son poignet... |
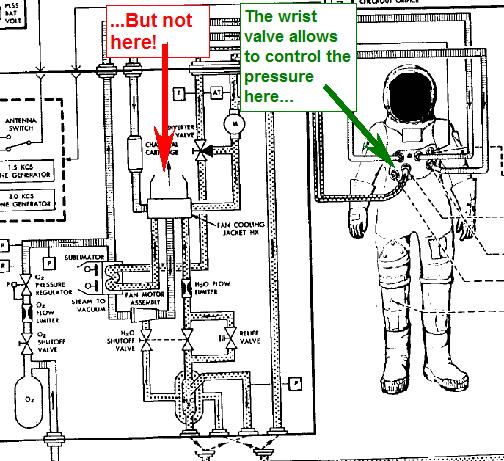 Mais cette valve permet de contrôler la pression d'oxygčne dans son habit, mais pas dans le sac de survie lui-męme. En cas de surpression persistante, l'astronaute doit quand męme fermer la valve sous le sac de survie... |
 ...Autrement l'astronaute pourrait se sentir bien aussi longtemps que le sac de survie peut contenir la surpression grâce ŕ la valve située sur son poignet, mais lorsque la surpression fait exploser les tubes dans le sac de survie, il se sentira nettement moins bien! |
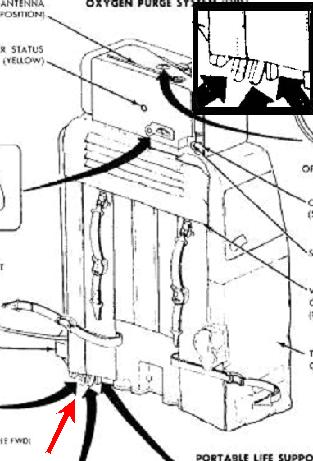 Maintenant, regardez les valves sous le sac de survie; elles sont petites et proches les unes des autres. Lorsque l'astronaute doit fermer une des valves, comme elles sont derričre lui, il ne peut les voir; avec ses doigts nus, il pourrait les sentir, et fermer la bonne, mais, avec ses gants pressurisés, et l'impossibilité de les voir, il n'y a pas moyen qu'il puisse les identifier de maničre sűre, et de fermer la bonne en toute sécurité; il pourrait fermer la mauvaise, ou en fermer plusieurs en męme temps. |
 Si un agent vous voyait attaché de cette maničre, vous pourriez ętre sűr de récolter une amende pour ętre mal attaché. Cette ceinture de sécurité ne garantit cetainement pas la sécurité de l'astronaute. |
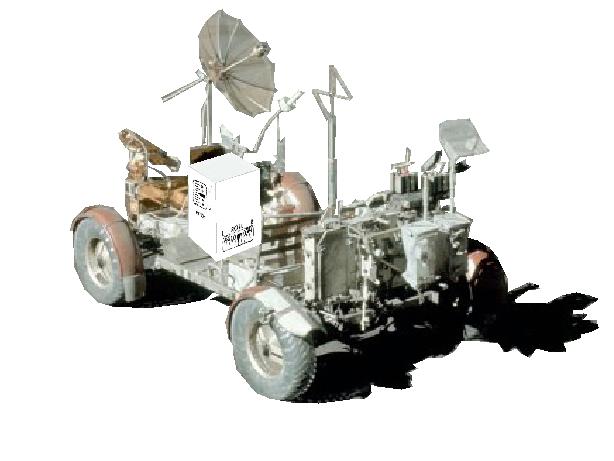
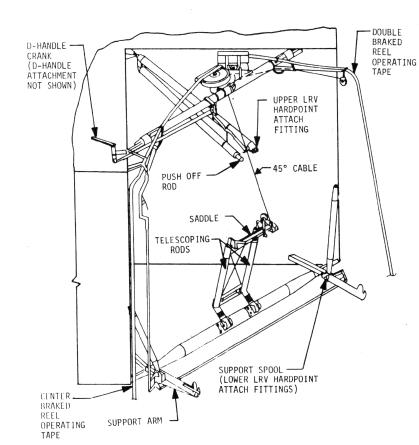 Cette figure montre le systčme qui permettait de déployer le rover. Nous pouvons nous demander comment le rover pouvait tenir dans son compartiment. |
 Cette démonstration (accélérée) de la NASA est supposée prouver que le rover pouvait tenir pliée dans son compartiment et pouvait aisément ętre déployé. |
 Toutefois, vous voyez que: 1) Lorsque le rover est plié, presque tout l'espace disponible est occupé par les roues du rover. 2) Lorsque le rover est déployé, vous voyez que c'est seulement avec son chassis nu; il n'y a pas d'équipement du tout dessus, męme pas les ailes des roues. |
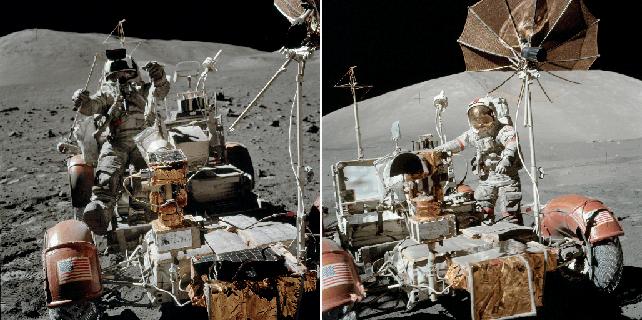
 Il y a clairement un contraste entre le rover nu qui est déployé dans la démonstration (ŕ gauche sur la vue stéréoscopique), et le rover complétement équipé (ŕ droite sur la vue stéréoscopique). |
 Il est absolument manifeste que, si le rover avait eu son équipement complet, il n'aurait pas tenu dans le compartiment, il n'y a pas assez de place dedans pour tout l'équipement du rover. |
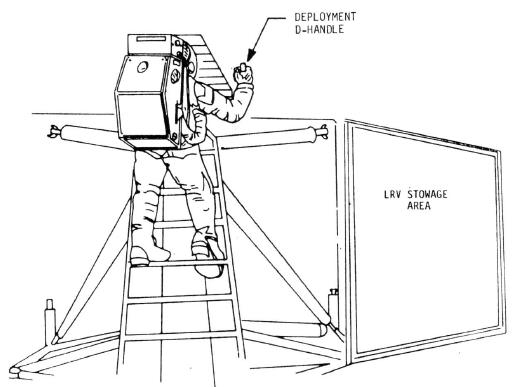 Une autre chose qui ne semble pas normale est la poignée de déploiement du rover. L'astronaute devait grimper sur le module lunaire pour l'atteindre. Les ingénieurs n'étaient donc pas capables de placer la poignée de déploiement plus bas, de maničre que l'astronaute n'ait pas ŕ jouer l'acrobate pour la maneuvrer? |
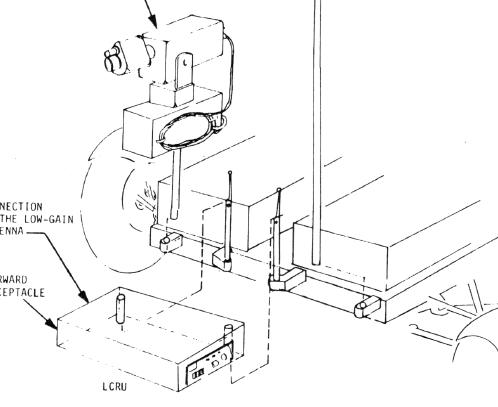 Cette figure montre comment la caméra TV était installée. |
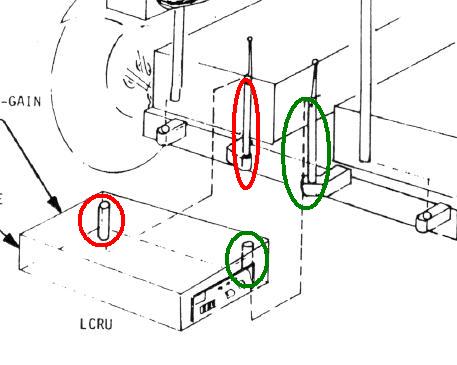 Deux pivots de support du LCRU, respectivement cerclés de rouge et vert, rentraient dans deux receptacles de bord, également cerclés de rouge et de vert. |
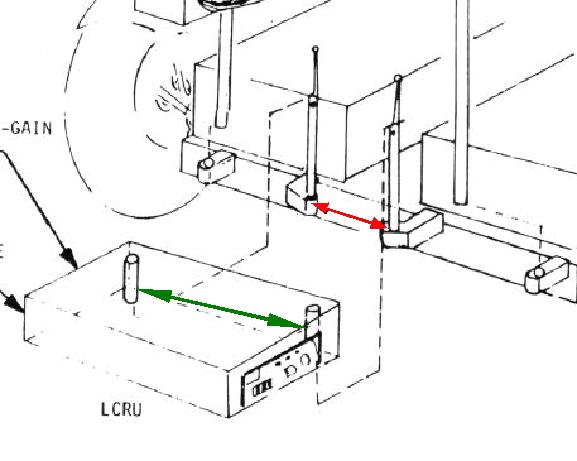 Mais, ce qui est étrange est que la distance entre les deux pivots de support est nettement plus grande que la distance entre les deux receptacles dans lesquels ils sont pourtant sensés rentrer. Est-ce que les distances sont élastiques sur le rover. |
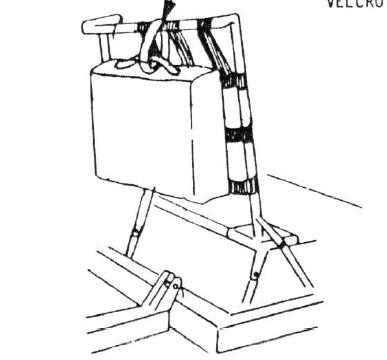 Sur ce schéma, ils expliquent comment suspendre une malette derričre le sičge avec du Velcro. |
Mais, avec tout l'attirail qui se trouve derričre les sičges, nous pouvons nous demander comment cette malette pouvait tenir derričre le sičge. |
 Maintenant, pour clôre cette partie, quelques photos étranges du rover. Sur cette photo d'Apollo 17, référencée AS17-134-20453, il y a quelque chose d'étrange, si nous faisons un gros plan de la batterie. |
 Sérieusement, comment se fait-il que cette batterie apparaisse aussi endommagée? |
 Quelqu'un m'a dit que la batterie n'était pas cassée, mais ombrée au lieu de cela. Mais cela n'explique pas les élements que j'ai entourés. |
 Et, si nous comparons le support de la caméra TV sur les photos AS17-134-20453 et AS17-134-20477... |
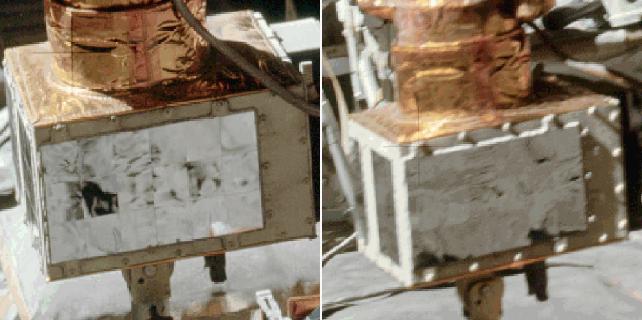 ...Pourquoi voyons nous des boulons du support apparaître nettement plus blancs sur la seconde photo que sur la premičre? Vous pourriez dire que c'est parce que ce côté est plus ensoleillé sur la deuxičme photo que sur la premičre, mais vous voyez que ce n'est pas le cas: La plus grande partie de ce côté est plus sombre sur la deuxičme photo que sur la premičre. L'explication du côté étant plus ensoleillé pourrait ŕ la rigueur convenir pour le haut du côté, mais pas son bas! |
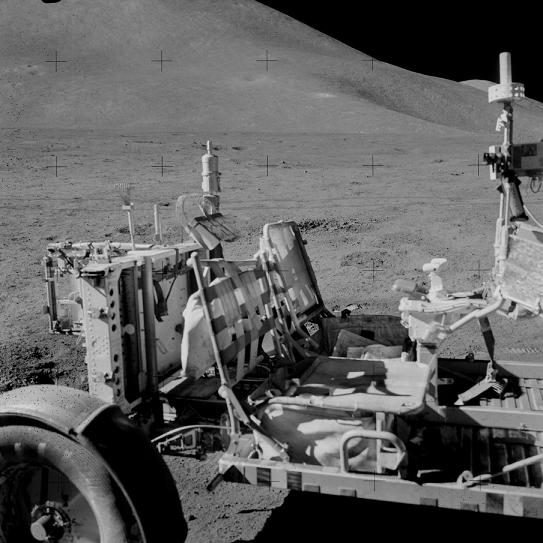 Et, sur cette photo d'Apollo 15, référencée AS15-92-12434... |
 ...Pourquoi le haut du sičge du passager apparaît-il anormal? |
 Pour conclure cette partie, dans cette séquence du rover supposée rouler sur le sol lunaire, la caméra filme d'abord en direction de la progression du rover, et le sol lunaire arrive frontalement, ce qui est normal... |
 Mais ensuite la caméra tourne sur le côté droit; comme la caméra ne filme plus en direction de la progression du rover, le sol lunaire ne devrait plus arriver frontalement, mais devrait se décaler vers la droite...Et pourtant il continue d'arriver frontalement! |
 Aprčs que le rover ait été déployé depuis le module lunaire, toutes ses parties devaient ętre installées, et ce n'était pas une mince affaire pour les astronautes, avec leurs gants pressurisés et la pauvre vision qu'ils avaient avec leur visičre. |
 Sur la vidéo, nous ne les voyons pas faire tout ce travail, ils sont hors champ, cachés par le module lunaire, nous ne faisons que les entendre. |
 Je doute qu'ils auraient été capables de faire tout ce travail compliqué sur la lune, ils ont certainement bénéficié d'une aide "magique". |
 En particulier, ils devaient installer le systčme de direction du module lunaire. |
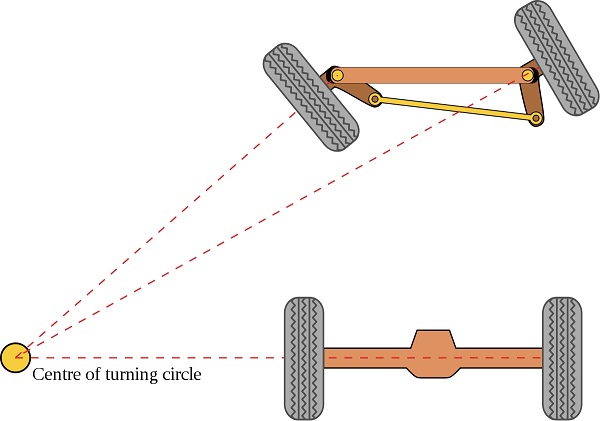 Ce systčme de direction utilisait la géomčtrie d'Ackerman, qui permet de faire tourner les roues différemment afin d'optimiser les virages. |
 Il y avait ŕ la fois une direction avant et une direction arričre, mais seule la direction arričre a accepté de marcher au départ. La direction avant aurait refusé de fonctionner initialement. Il y avait un interrupteur qui permettait de choisir entre la batterie A ou C; ils ont basculé plusieurs fois cet interrupteur, mais sans effet ŕ l'installation. Il y avait aussi un fusible, mais nous sommes sűrs qu'il n'a pas fondu, car ils ont réussi plus tard ŕ faire fonctionner la direction avant sans le changer. Nous pouvons nous demander pourquoi le basculement de l'interrupteur de sélection de la batterie n'aurait pas fonctionné de maničre répétitive ŕ l'installation, alors qu'il aurait accepté de fonctionner plus tard, au début de la seconde EVA. |
La conséquence que la direction avant ne fonctionnait pas pendant la premičre EVA est que les roues avant ne pouvaient pas tourner pendant cette premičre EVA. Et j'étais sűr que la clé était de trouver une photo de la premičre EVA sur laquelle nous pouvons trouver l'évidence que les roues avant étaient tournées. |
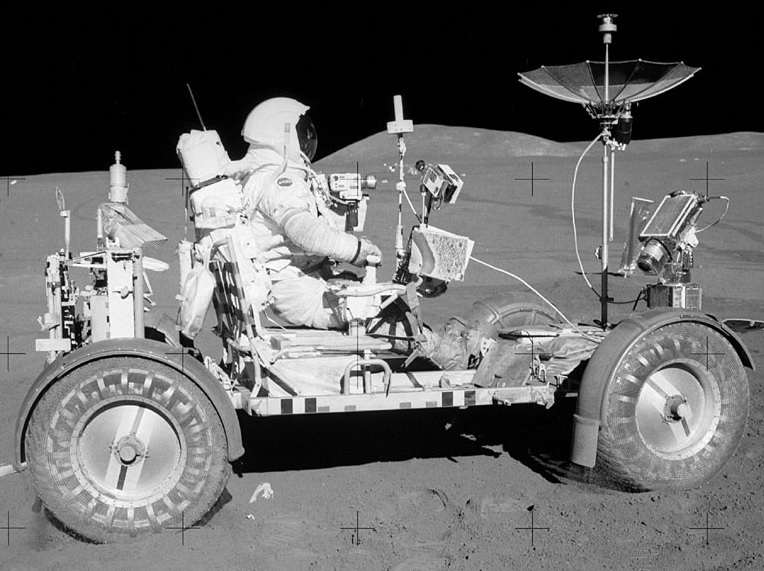
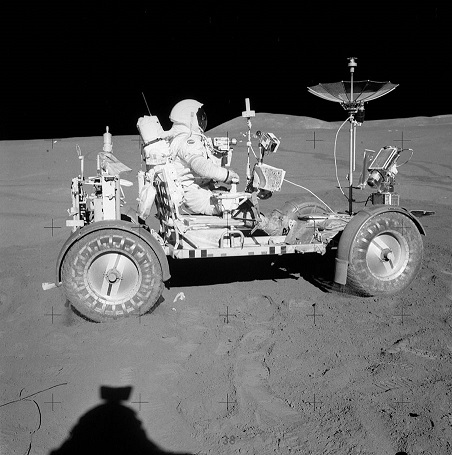 Et je l'ai trouvée sur la photo AS15-85-11471, une fameuse photo sur laquelle nous voyons Scott (ou ce qui est supposé ętre Scott) assis sur le rover. |
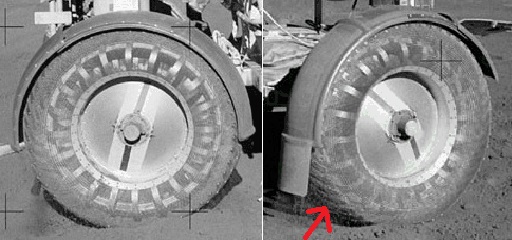 Si nous examinons attentivement les roues, nous constatons que, alors que nous ne voyons pas la bande centrale sur la roue arričre, nous pouvons la voir sur l'arričre de la roue avant, ce qui montre qu'elle est tournée vers la gauche. |
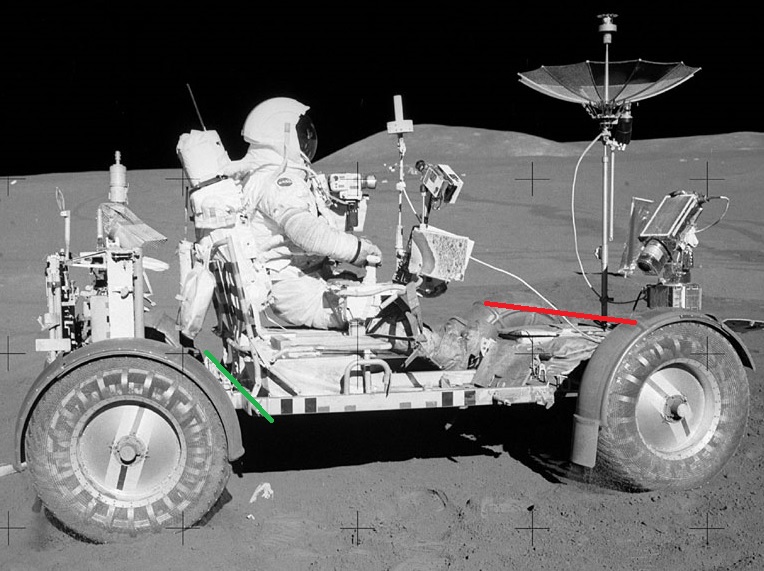 Et, pour contrer l'argument ce que cela pourrait ętre la roue arričre qui est tournée en fait, je donne une autre indication que les roues avant sont effectivement tournées. Si je trace une ligne (rouge) entre les deux męmes replis des ailes des roues avant, et je la compare avec une ligne (verte) longeant le côté arričre sur chassis, juste derričre les sičges, nous constatons que la ligne rouge est tournée de maničre conséquente vers la gauche relativement ŕ la ligne verte, ce qui confirme que les roues avant sont effectivement tournées vers la gauche. |
 Donc, alors que les roues avant ne pouvaient pas ętre tournées pendant la premičre EVA, en raison d'une direction avant bloquée, il y a l'évidence que les roues avant peuvent ętre vues tournées dans cette EVA. Vous comprenez ŕ présent pourquoi la direction avant ne devait pas fonctionner dans cette EVA: Cela permettait de donner un indice du trucage. |
 Et ce n'est pas la seule surprise. Dans le rapport de mission d'Apollo 15, ils disent que l'utilisation simultanée des deux systčmes de direction permettait de faire un virage avec un rayon minimum de 122 pouces, ce qui fait 3,1 mčtres. Cela signifie que nous ne devrions pas voir sur les photos d'Apollo 15 un virage avec un rayon inférieur ŕ 3 mčtres... |
 ...et pourtant, sur la photo AS15-82-11056... |
  Nous pouvons voir un virage suspect. Est-il possible de prouver qu'il n'a pas le rayon minimal requis? |
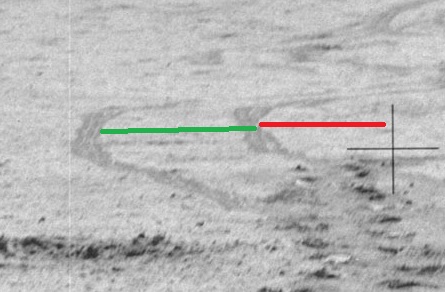 Nous voyons que le rayon de ce virage est équivalent ŕ l'espace entre les traces de roues (et męme un peu plus petit). |
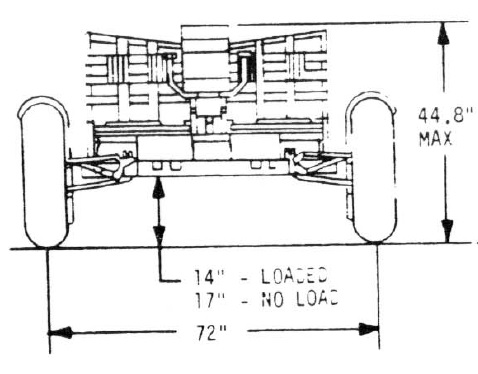 Et, dans la documentation du rover, il est dit que l'espace entre les roues du rover était de 72 inches, soit 1,83 mčtre. |
Cela signifie que le rayon de ce virage, loin d'ętre au-dessus du rayon minimal qui pouvait ętre obtenu avec les deux systčmes de direction, en avait presque la moitié. |
 Et le show continue avec la photo AS15-85-11403. |
 Nous voyons que l'espace entre les traces de roues que j'ai indiqué en rouge est nettement plus petit que l'espace qui précčde. Et, pour montrer que cela ne vient pas simplement de l'effet de la distance qui fait que cet espace décroît progressivement, cet espace augmente ŕ nouveau au delŕ. |
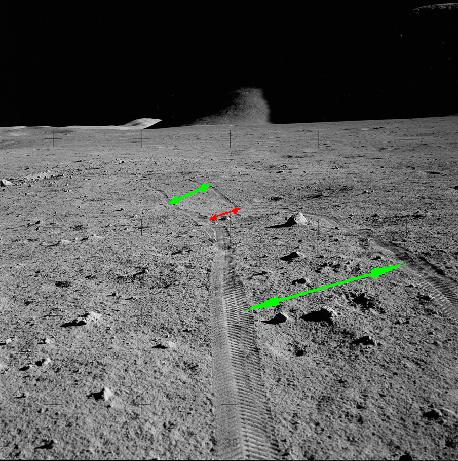
 Une autre surprise sur la photo AS15-87-11835. |
  Nous voyons deux jeux de paires de traces proches l'un de l'autre. |
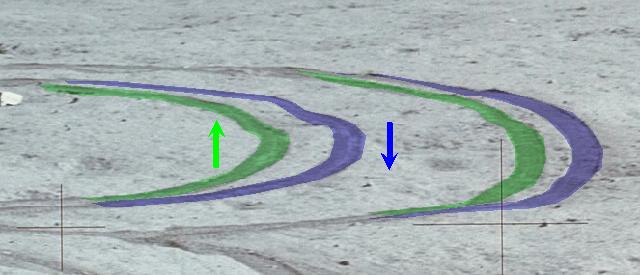 Une paire de traces, que j'ai colorées en vert, va dans une direction, et une autre paire de traces, que j'ai colorées en bleu, va dans la direction opposée (les directions peuvent ętre inversées). |
 Normalement, l'espace entre les roues n'a pas changé entre les deux directions, et donc l'espace entre les traces correspondantes devrait ętre le męme, et nous constatons qu'il est différent. |
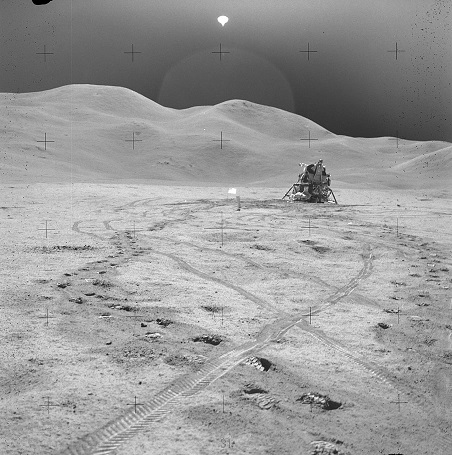
 Une derničre surprise sur la photo AS15-82-11108; nous voyons le rover au loin. |
  Le rover pourrait sembler normal vu de loin, mais, quand nous le voyons de plus prčs, nous remarquons des détails étranges. |
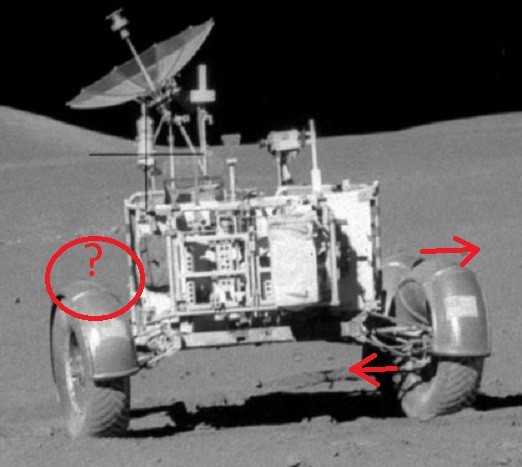 Nous remarquons que les roues arričre sont tournées vers la gauche, mais la roue avant droite est vue tournée vers la droite; nous n'en voyons pas beaucoup, mais assez pour ętre sűr qu'elle est tournée vers la droite. Et, concernant la roue avant gauche, nous ne la voyons pas du tout, elle est carrément absente. Alors ce merveilleux morceau de technologie peut rouler avec trois roues seulement, et en plus avec des roues tournant dans des directions opposées. |
 Une derničre surprise, dans une vidéo cette fois. Dans Geology station 1, au temps 122:25:01, nous trouvons le commentaire suivant: "As Jim climbs on the rover, the image starts to jiggle". Soit: "Alors que Jim grimpe dans le rover, l'image commence ŕ danser". Voici un extrait de la vidéo correspondante. Nous voyons effectivement l'image danser considérablement, parce que Jim fait bouger le rover alors qu'il grimpe dessus. |
 Mais, si le rover se balance, c'est aussi le cas de l'antenne haut gain, qui ainsi ne reste pas correctement orientée vers la terre, ce qui signifie qu'il devrait y avoir une perte momentanée de la transmission de la vidéo vers la terre. |
Et pourtant, ŕ aucun moment nous ne constatons une rupture de la transmission sur la vidéo, car l'image ne disparaît jamais. |
 A part ces quelques petites observations mesquines, tout va bien, et on peut se demander pour je cherche des poux ainsi. |
