QCad
QCad User Reference Manual
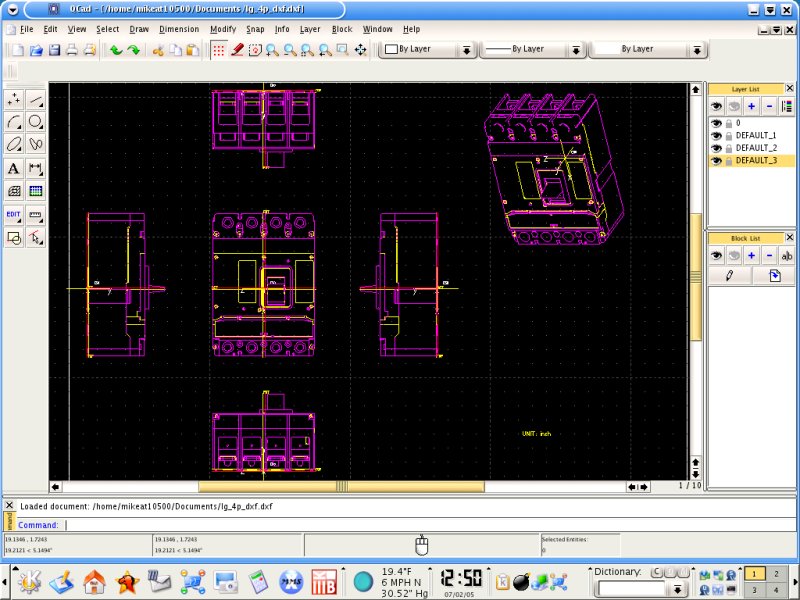
QCad is an application for computer aided drafting in two dimensions. With QCad you can create technical drawings such as plans for buildings, interiors or mechanical parts. QCad works under Linux, Unix Systems, Mac OS X and Windows. The source code of QCad is released under the GPL (Open Source).
Some of the main reasons why you might want to use QCad are its simplicity, the user friendly interface, its many features or simply the fact that it works on your favorite platform - be it Linux, an other Unix system, Windows or Mac OS X. Last but not least QCad is part of the open source movement. This means that if you're a programmer you can add your own functionality.
QCad has an estimated user base of over 100'000 people worldwide. Its users range from industrial companies in the fields of mechanical and electronic engineering to private users, teachers and students. There are many other capable CAD systems out there and most of them offer much more than QCad does. But most of them are bound to one single platform or are simply not affordable for many potential users. That's where QCad kicks in. QCad targets the hobbyists, occasional CAD users and people who are not CAD professionals but still need to draw plans once in a while. QCad is the CAD for the rest of us.
Main Features
- Various modes for creating lines, arcs, circles, ellipses, parallels, angle bisectors, ...
- DXF Format (DXF 2004)
- Texts in many different CAD fonts
- Dimensioning of distances, angles, diameters, tolerances, ...
- Hatches and solid fills
- Full support of Layers and Blocks (Inserts)
- Powerful selection and modification tools (move, rotate, mirror, trim, stretch, ...)
- Snapping to objects (endpoints, centers, intersections, ...)
- Console for co-ordinate positioning and launching commands
- Multiple undo / redo levels
- Support for various units including metric, imperial, degrees, grad, rad, ...
- Import and Export of Bitmaps (JPEG, PNG, ...)
- Creation of PS files which can be easily converted to PDF
- Translations of the user interface: Czech, Danish, Dutch, English, Estonian, French, German, Greek, Hungarian, Italian, Polish, Russian, Slovak, Spanish, Turkish
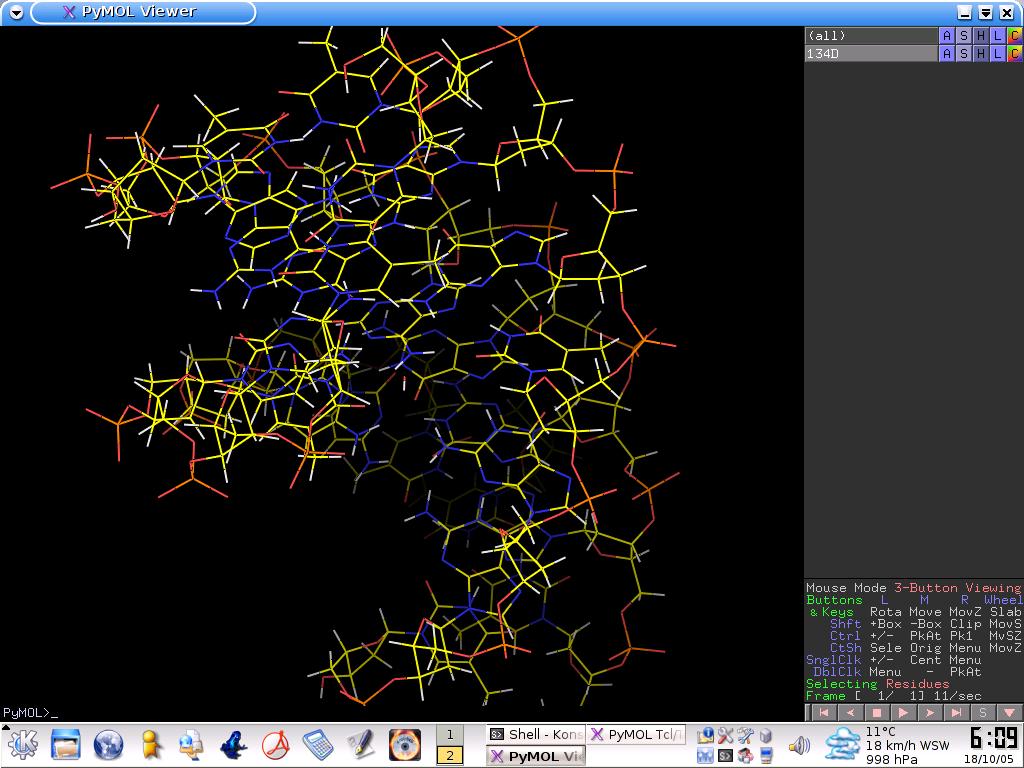
PyMOL
PyMOL is one lone scientist's answer to the frustration he encountered with existing visualization and modeling software as a practicing computational scientist.
Anyone who has studied the remarkable complexity of a macromolecular structure will likely agree that visualization is essential to understanding structural biology.
Nevertheless, most researchers who use visualization packages ultimately run up against limitations inherent in them which make it difficult or impossible to get exactly what you need.
Such limitations in a closed-source commercial software package cannot be easily surmounted, and the same is still true for free programs which aren't available in source form.
Only open-source software allows you to surmount problems by directly changing and enhancing the way software operates, and it places virtually no restrictions on your power and opportunity to innovate.
For these reasons, we believe that open-source software is an intrinsically superior research product and will provide greatest benefit to computer-assisted scientific research over the long term.
Launched over Christmas break in December 1999, PyMOL was originally designed
to: (1) visualize multiple conformations of a single structure [trajectories or docked ligand ensembles]
(2) interface with external programs,
(3) provide professional strength graphics under both Windows and Unix,
(4) prepare publication quality images, and
(5) fit into a tight budget.
All of these goals have since been realized. Although PyMOL is far from perfect and lacks such desirable features such as a general "undo" capacity, it now has many useful capabilities for the practicing research scientist.
We hope that you will find PyMOL to be a valuable tool for your work, and we encourage you to let us know what ideas you have for making it even better.
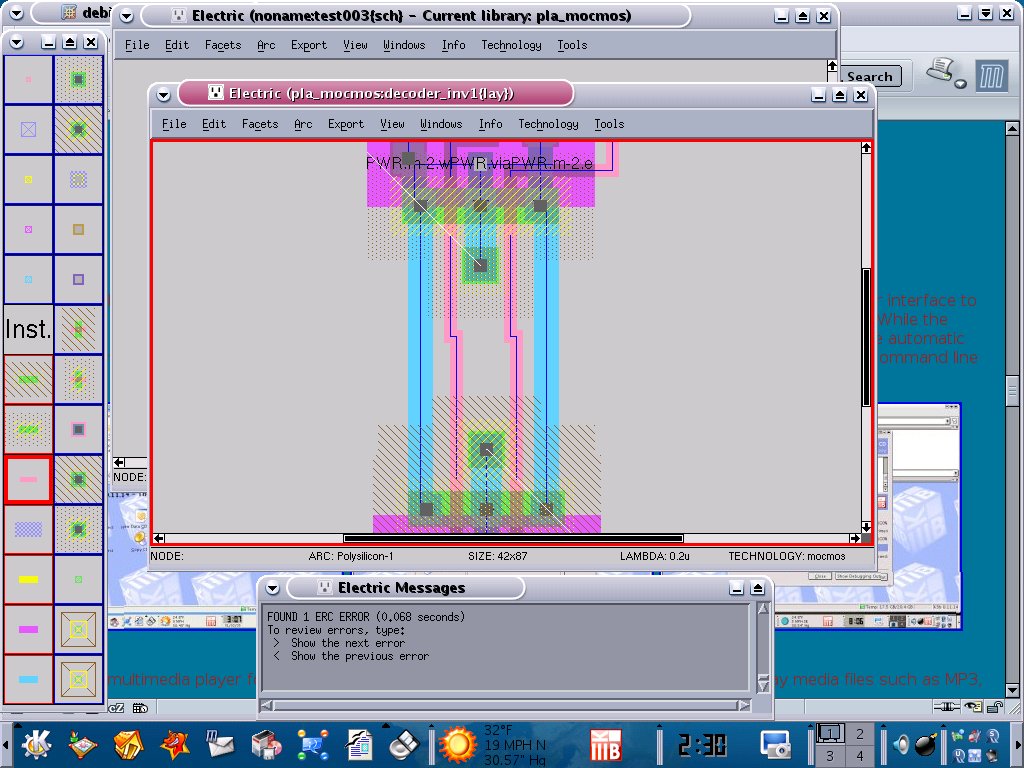
Electrical CAD system
Electric Documentation
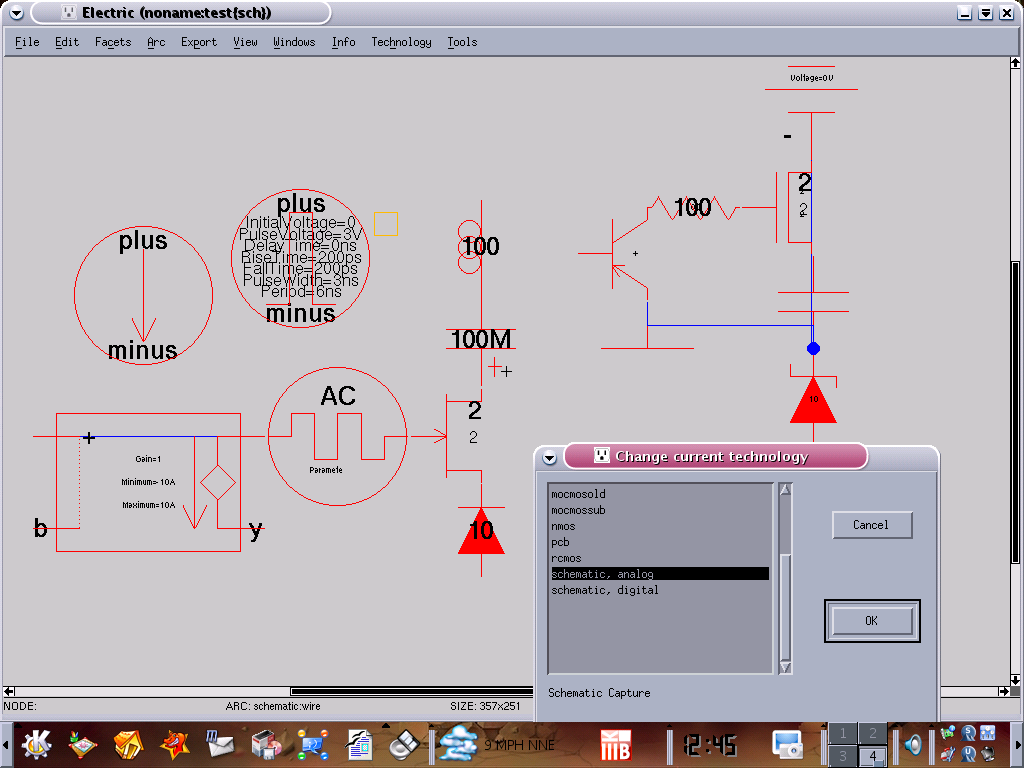
Electric is a sophisticated electrical CAD system that
can handle many forms
of circuit design, including custom IC layout (ASICs),
schematic drawing,
hardware description language specifications,
and electro-mechanical hybrid
layout.
GRASS GIS
GRASS 5.3.x Reference Manual
General Information
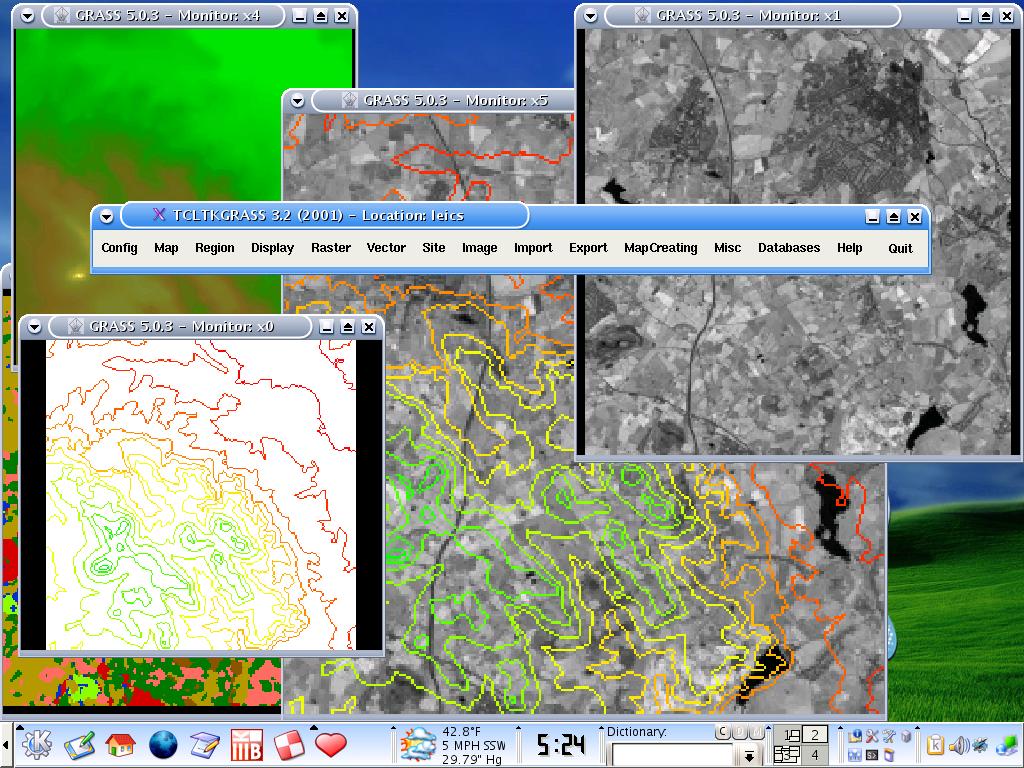
Geographic Resources Analysis Support System, commonly referred to as GRASS GIS, is a Geographic Information System (GIS) used for data management, image processing, graphics production, spatial modelling, and visualization of many types of data. It is Free (Libre) Software/Open Source released under GNU General Public License (GPL).
Originally developed by the U.S. Army Construction Engineering Research Laboratories (USA-CERL, 1982-1995), a branch of the US Army Corp of Engineers, as a tool for land management and environmental planning by the military, GRASS has evolved into a powerful utility with a wide range of applications in many different areas of scientific research. GRASS is currently used in academic and commercial settings around the world, as well as many governmental agencies including NASA, NOAA, USDA, DLR, CSIRO, the National Park Service, the U.S. Census Bureau, USGS, and many environmental consulting companies.
The GRASS Development Team has grown into a multi-national team consisting of developers at numerous locations.
GRASS Features
GRASS (Geographic Resources Analysis Support System) is a raster/vector GIS, image processing system, and graphics production system. GRASS contains over 350 programs and tools to render maps and images on monitor and paper; manipulate raster, vector, and sites data; process multi spectral image data; and create, manage, and store spatial data. GRASS uses both an intuitive windows interface as well as command line syntax for ease of operations. GRASS can interface with commercial printers, plotters, digitizers, and databases to develop new data as well as manage existing data.
GRASS and network support for team
GRASS supports work groups through it's LOCATION/MAPSET concept which can be set up on NFS (Network File System). Keeping LOCATIONs with their underlying MAPSETs on a central server, a team can simultaniously work in the same project database.
[see also: GRASS capabilities]
GRASS Programming
GRASS is released under GNU GPL, the source code (more than 1 Mio lines of C) is completely available. GRASS provides a sophisticated GIS library which can be used for own developments. A GRASS Programmer's Manual is available for download.