TUNNELING UNIT
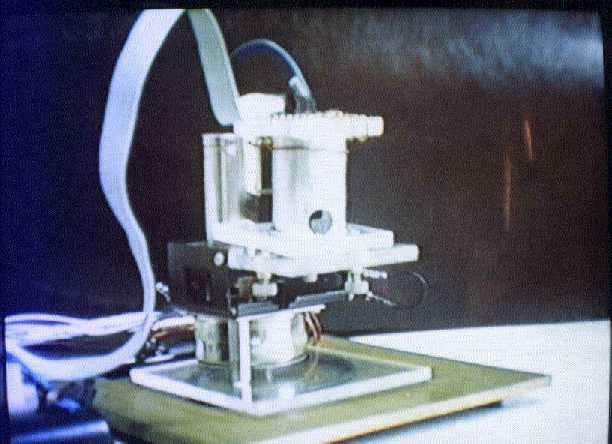
Following the lead of Jurgen Muller, the tunneling unit was re-designed for screw driven coarse approach, with mechanical reduction. A stepper motor allows the approach sequence to proceed automatically, under program control. This setup was so successful in both its reliability and the resolution of its vertical steps, that it can function reasonably well in conjunction with 90-Volt piezo drivers. Originally 300V amplifiers had to be used, which were more complicated and probably not so precise.
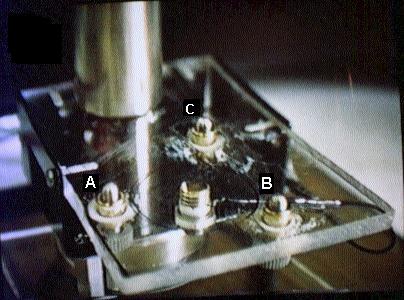
The fundamental aspect of this design is that the scanning head rests on a tripod of precision screws. Because of the postion of the tip relative to the screws, a considerable level of accuracy can be obtained during coarse approach. Turning screw A or screw B manually, moves the tip vertically with a reduction of 2 relative to the vertical motion of the screw. (With a pitch of 80 threads per inch this gives some rather fine movement.) At this stage, gap width is monitored by a small handheld optical microscope. However when C is turned by the stepper motor, the reducion in vertical motion is close to 20.
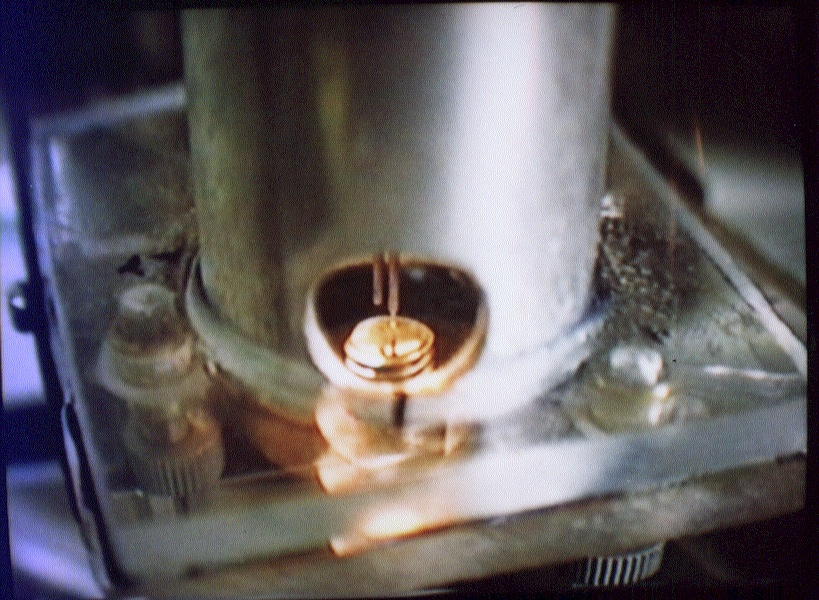
Now the stepper motor used has 48 steps per revolution, which is further reduced by a factor of 4.5 using gear wheels. Prior to stepping forward, the tip is retracted as far back as the piezo can go. And afterwards, it moves swiftly forward in search of the sample surface. When the surface is encountered, a small tunnel current is registerd and the tip is held at a safe distance by the feedback loop.