A lo largo de dos meses me he dedicado en exclusiva al desarrollo de este mando electrónico, por este motivo la no actualización de la página. Bueno, solo espero que osguste este ingenio.
1. Introducción
El porque de este mando electrónico es emplear otro método para controlar nuestro maravilloso coche de slot, ya que con nuestro típico mando tenemos una serie de inconvenientes:
- La respuesta de nuestro mando es logarítmica ya que la tensión que aplicamos a la pista es Vo=Vin(R2/(R1+R2)), estando limitada la corriente de arranque del motor por la resistencia R1, por lo tanto para que arranque el motor se necesita un tensión grande (mayor de 3V, esto depende según el tipo de motor).
- La limitación de la corriente, R1 consume siempre energía, por lo cual disipa una potencia, como ya sabeis esto es un problema, puesto que surge la necesidad del empleo de disipadores, las resistencias se calientan con el tiempo y varían las condiciones de funcionamiento. Amén de los cohes que consumen mas de 300mA.
- Para cada tipo de pista y especialidad se necesita una resistencia de mayor o menor valor, con un ajuste un tanto extraño.
- La necesidad de buscar la picaresca de un cable mas o menos gordo y todo lo demás que todos conocemos.
- Por lo tanto, con este prototipo se intenta sulucionar todos estos problemas de una forma mas profesional por así llamarlo, el control de motores mediante una señal PWM.
2. Partes del circuito
Como ya he mencionado, el método de control del motor es mediante una señal PWM (modulada en pulso), no voy a entrar a explicar como se genera esta puesto que existe mucha literatura hacerca de este tema, a continuación voy a describir las partes del circuito y su funcionamiento global:
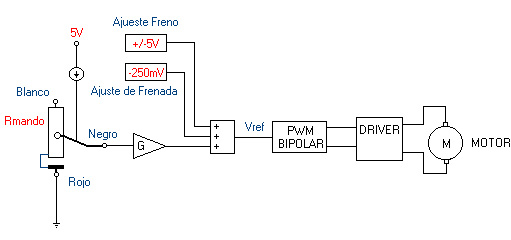
2.1. Circuito acondicionador del mando.
Este se encarga de medir la resistencia del mando mendiante un corriente constante, de tal forma generamos la señal del mando proporcional a la posición del gatillo, esta señal se llama Vref, la cual va a modular en amplitud la señal PWM.
En este circuito también se regula las siguentes características del mando:
- Tensión máxima de salida del mando (aplicada a la pista).
- Sensibilidad del mando.
- Regulación del freno del motor.
- Respuesta temporal del sistema.
Obteniendose una tensión proporcinal al mando mediante una fuente de corriente constate, esta se amplifica con una ganancia G, la cual ajusta la tensión máxima del mando cuando apretamos al máximo el gatillo, por lo tanto la potencia máxima que aplicamos al coche.
Por lo tanto, la resistencia del mando es independiente a la tensión que se aplica al coche, no influyendo esta en la corriente de arranque del motor, siendo esto lo que ocurre actualmente con los mandos estandar.
De esta manera simplemente apretando el mando al máximo podemos ajustar la tensión máxima que se aplica al motor.
Mediante dos potenciometros regulamos el freno del motor, con el que regula la tensión de +/-5V, ajustamos el punto de frenada, esto es decir el 0V de la pista, de tal modo que el coche no se mueva al soltar el gatillo. Con el segundo potenciometro, con el que regula la tensión de +/-250mV, ajustamos la cantidad del freno del coche, este se realiza aplicando una tensión negativa al motor, de tal modo que graduamos la potencia de frenado del coche.
Conjugando los anteriores reglajes, conseguimos una total libertad para regular la frenada y potencia máxima que aplicamos al vehículo.
La suma de estas tres acciones se pasa por un filtro de primer orden, con el cual conseguimos ajustar la respuesta temporal del motor, que quiere decir esto, que se puede regular un retardo entre que apretamos el gatillo y el motor interactua con esta señal de control, controlando así un gatillazo un tanto extremo.
2.2. Circuito generador de la señal PWM Bipolar.
Mediante la señal Vref la cual es proporcional al nivel del señal del mando (lo que apretamos el gatillo), se genera la señal PWM Bipolar, la cual se encarga de atacar el driver de potencia (este se describirá posteriormente).
Esta se logra comparando la tensión Vref con una señal triangular a una frecuencia de 18 KHz. El porque de esta frecuencia se debe a la inductancia del bobinado del motor, puesto que la señal que alimenta el motor es una señal bipolar cuadrada a la frecuencia anteriormente citada.
2.3. Circuito Driver del motor.
El driver del motor es un puente en H de transistores DMOS, este actua como un interruptor que oscila a 18KHz, como la señal que abre o cierra este interruptor es la PWM, este pemanecerá abierto o cerrado mas o menos tiempo en función del ancho del pulso de la señal, consiguiendo así una señal de 0 a la tensión máxima que nosotros deseemos, así como tensisiones negativas en el motor.
3. Esquemas Eléctricos
Los esquemas eléctricos se dividen en tres partes diferenciadas, para su correcto montaje, aconsejo el montaje por orden de cada esquema, comprobando su correcto funcionamiento:
3.1 Alimentación.
Este circuito provee de la fuente de aliementación al mando. La tensión de entrada "Va", es la seleccionada de la fuente de alimentación que empleeis, como siempre 9,12,15 o 18V, con las características normales de 1 a 1.5A para rally slot, pista ...
Esta se emplea directamente para alimentar el driver de potencia y el convertidor CC-CC.
De esta Va sacamos la alientación diferencial del circuito "Vcc" y "Vee", siendo su valor +-5V, para realizar esto empleo un convertidor CC-CC BWD2405 de la marca Traco, este puede ser uno similar de otros fabricantes como Laritek, Power-One, ect ..., eso sí que tenga una potencia de salida de 3W.
Esta ha sido la solución mas rápida y sencilla para aliementar el circuito de PWM, pero es el método mas costoso, el precio del convertidor ronda los 30€, pero tranquilos, en la versión V4.0 se está mejorando esto.
Por último comentar el consumo del circuito:
-La alimentación de +-5V (Vcc y Vee) consumirá aproximadamente unos 40-60mA.
-La alimentación Va consumirá aproximadamente el consumo del motor del vehículo, ya sabeis, para un motor Rx41 de 200-350mA en marcha, si está en arranque, este tendrá unos picos de hasta 1A (de sobra sabeis este tema).
Pincha aquí para ver el plano correspondiente.
3.2 Vref-PWM
Este circuito se encarga de medir la resistencia del mando, traduciéndola a una tensión proporcional y generar una señal PWM bipolar proporcional a esta.
Para ilustrar esto vamos a ver un ejemplo:
Imaginaros que tenemos un mando convencional con una resistencia de 30 ohm y cortocircuitamos el freno (quitamos el freno, por locual en reposo tenemos el principio de la resistencia, siendo el valor de aproximadamente 0.1 ohm). Por lo tanto tenemos:
-Mando en reposo = 0 ohm
-Mando al 50% de gas = 15 ohm
-Mando al 100% de gas = 30 ohm
y la tensión de la pista seleccionada a 15V, los ajuste del control de frenado a 0 (sin actuar), vamos a ver las señales del mando en las tres situaciones descritas anteriormente:
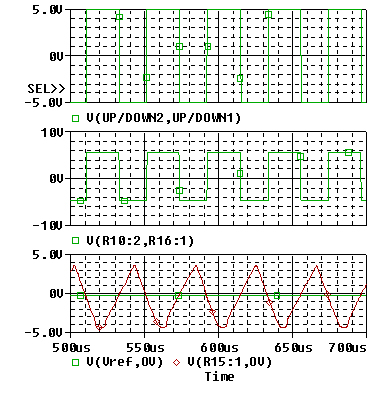
Señales con mando en reposo (0.1 ohm):
En la figura inferior se observa la comparación entre la Vref (en verde) y la señal triangular, de esta manera se genera la señal en PWM (figura del medio).
La figura superior representa la señal que ataca al driver, sustituyendo los valores de +-5V por 0-15V, obtenemos la forma de onda de la señal que ataca el motor.
El sistema se basa en la relación entre que la onda (el timpo que está en +5 y -5), esto es llamado factor de servicio "D". Para tener una tensión 0V (coche parado), la relación tiene que estar a un 50%, en la figura está casi, por lo cual hay que ajustar el cero del mando
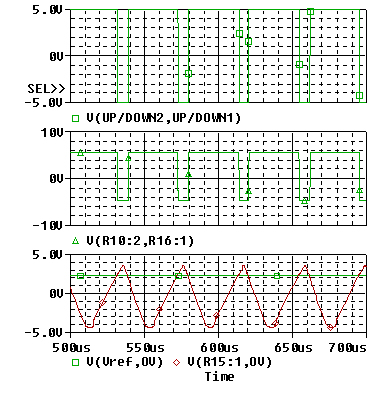
Señales con mando al 50% (15 ohm):
En la figura inferior se observa la comparación entre la Vref (en verde) y la señal triangular, de esta manera se genera la señal en PWM (figura del medio).
La figura superior representa la señal que ataca al driver, sustituyendo los valores de +-5V por 0-15V, obtenemos la forma de onda de la señal que ataca el motor.
Al aumentar el gas, amenta la resistencia y aumenta la Vref, por lo tanto la tensión de salida es mayor como se puede observar en la figura superior.
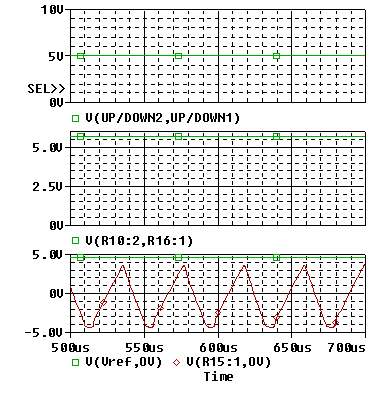
Señales con mando al 100% (30 ohm):
En la figura inferior se observa la comparación entre la Vref (en verde) y la señal triangular, de esta manera se genera la señal en PWM (figura del medio).
La figura superior representa la señal que ataca al driver, sustituyendo los valores de +-5V por 0-15V, obtenemos la forma de onda de la señal que ataca el motor.
En esta situación podemos observar como la tensión de salida es el máximo que aplicamos (en este caso 15V).
A la vista de los resultados, se puede concluir que tenemos el control absoluto de la tensión la tensión que se puede aplicar al motor, y lo mas importante, esta puede ser positiva y negativa, de esta manera podemos configurar el frenado del motor, no como hasta ahora (donde se cortocircuita el motor, se fuerza a 0V), sino que se le aplica una tensión negativa, lo que aumenta el poder de frenada del vehículo.
Pincha aquí para ver el plano correspondiente.
3.1 Driver de Potencia
Este circuito se encarga de aportar la potencia a las señales PWM.
Este consta de cuatro transistores DMOS formando un puente en H, teniendo como característica principal su alto rendimiento, lo que se traduce en una baja dipación de potencia, poder trabaja en cuatro cuadrantes de tensión e intensidad y la facilidad y sencillez de manejo.
Otras características es la limitación de corriente de este y su enable, los cuales no han sido empleados en este diseño.
En contra el coste unos 10€, en la versión V4.0 esto va a ser solucionado.
Pincha aquí para ver el plano correspondiente.
4. Materiales.
En el esquema teneis todos los componenetes, pero voy aclarar dos cosas:
1. Resistencias, comprarlas de una potencia de 1/4W y del 1%.
Si teneis alguna duda de la polaridad, el valor de las resistencias, ect...., consultar los capitulos anteriores disponibles en la sección de Laboratorio.
Cantidad Referencia en Plano Material Descripción 2 C1,C4 47u Condensador electrolítico 65V 1 C2 1000u Condensador electrolítico 65V 16 C3 100n Condensador cerámico 100V C5-16, C21-23, C26 100n Condensador cerámico 100V 2 C20, C17 15n Condensador cerámico 100V 1 C18 22n Condensador cerámico 100V 1 C19 220n Condensador cerámico 100V 1 C25 470n Condensador cerámico 100V 4 D1, D4, D5, D6 LED Diámetro 5mm, 10mA 2 D2-3 1N4004 Diodo rectifcador 2 D7-8 BYW98 Diodo rectifcador 1 D9 LM 285 2.5V Referencia de tensión 2.5V 1 D10 1N4148 Diodo rápido 2 P1, P2 47K Lineal para PCB 1 P3 5K Lineal para PCB 1 P5 200R Lineal para PCB 2 R1, R3 565 Resistencia metal film 1% 1/4W 2 R2, R12 1K2 Resistencia metal film 1% 1/4W 1 R4 10 Resistencia metal film 1% 1/4W 1 R5 1 Resistencia metal film 1% 1/4W 1 R6 5K11 Resistencia metal film 1% 1/4W 1 R7 38K7 Resistencia metal film 1% 1/4W 2 R8,R9 5K6 Resistencia metal film 1% 1/4W 6 R10,R15,R16,R18,R21,R25 1K Resistencia metal film 1% 1/4W 1 R11 62 Resistencia metal film 1% 1/4W 1 R13 20K Resistencia metal film 1% 1/4W 5 R14,R19,R20,R23,R28 10K Resistencia metal film 1% 1/4W 2 R17,R27 4K7 Resistencia metal film 1% 1/4W 1 R22 1K5 Resistencia metal film 1% 1/4W 2 R24,R26 100K Resistencia metal film 1% 1/4W 1 U1 L6202-3 Puente en H DMOS DIP 18 2 U2-3 OP-07 Operacional DIP 8 2 U4,U7 LM393 Operacional DIP 8 1 U5 TL084 Operacional DIP 14 1 U6 74HC00 Puerta NAND DIP 14 4 Zócalo 8 pin 2 Zócalo 14pin 1 Zócalo 18 pin
5.Fotos del prototipo.
Aquí tenemos un par de fotos del prototipo construido.

En esta foto se muestra el conversor de Vref a PWM bipolar y el driver del motor. Obsrvando el circuito, el cable negro de la izquierda es la tensión Vref (tensión del mando), esta se transforma a PWM y se la pasa al driver que es el integrado de la fila de abajo a la derecha, siendo los cable gordos amarillo y negro la tensión que iría al motor o en su defecto a la pista.
La alimentación del circuito venría por el conector blanco superior (Vcc,Vee, 0V) y la Va del driver por el cable rojo gordo.

En la foto observamos la entrada de la fuente de slot (conector naranja) Va, en los leds inferiores (verde y rojo) proteje la entrada contra conexiones inversas. Esta Va va hasta el convertidor BWD2405 de donde saco Vcc y Vee, el cual se muestra en los leds rojos su correcto funcionamiento.
El circuito integrado del centro es el responsable de medir la resistencia del mando, siendo el de su derecha el el ajusta la señal Vref. El ajuste del freno se realiza mediante los potenciometros negros de la derecha.
Los cables gordos superiores rojo, amarillo y negro son los que pasa la aliementación al otro circuito. La señal Vref sale por una punta de pruebas que no se observa en la fotografía.
ElectroSlot
Advertencia
En esta página se publicaran textos o artículos de edición propia e información recopilada de la red, simpre que pueda ser posible la publicación del autor se mencionará.
Esta página no se hace responsable de los posibles daños que puedan ocasionar los montajes aquí expuestos