
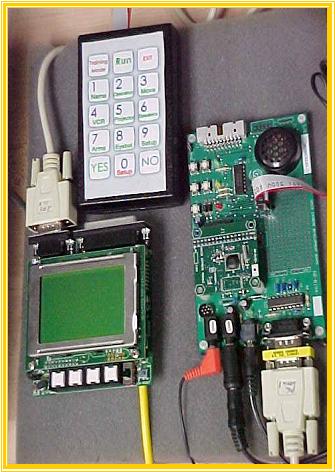
The voice recognition system consists
of various parts:
|
|
||
|
The voice recognition module operates at nominal voltage of 9 VDC. To provide the nominal voltage to the voice recognition module, a voltage power supply converter had to be integrated into the design. This power supply converts 12 VDC that comes from the battery to 9 dc Volts allowing the voice recognition module to operate to its nominal voltage. The voice recognition system establish communication with the EYEBOT via serial port 3. |
|
the EYEBOT via serial port 3. Since the EYEBOT serial port is not a standard RS232 9 pin port, it was necessary to use a RS-232 10 to 9 pin converter. |
|
| VCR Interface board increase the digital line 1, 2, 3 from the EYEBOT to seven (7) digital output. These lines control the VCR functions via voice commands from the voice recognition system. This interface board is composed of one decoder de-multiplexer, seven (7) relays and the corresponding VCR outputs. |
|||||||||||||||||
|
|
