MECHANICAL & ELECTRONIC UPDATES
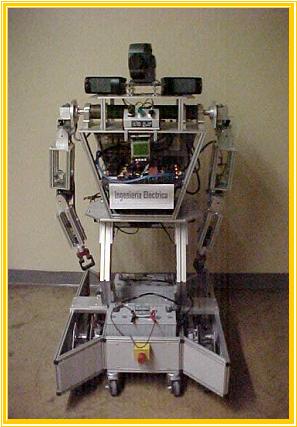
Mechanical updates to the Robot is an important step in our design process. During this phase the group will research, evaluate and understand all the electronic and mechanical characteristics of the Complete Robot design. The group will start brainstorming ideas of how we will improve the design, and made the robot more efficient. The addition of new mechanical motors, and relocation of different parts, among other, are part of the goals that we will intent to achieve.
Installation of Encoders:
The Encoders will control the motion system of the robot.
They will be controlling the speed, position and angle rotation of
the arms and base motors.
|
|
|
 |
|
|
Installation of limit switch:
The limit switch will be installed in the
robot arm with the intention of controlling
the arm movement.
|
|
Relocation of Lower Panel:
The relocation of the lower panel to a better position is a goal
with the intention of saving space, avoid any short circuit, and have
better positioning to conduct troubleshooting.
Wheel Alignment:
We also will re-enforce and align DC motors and wheels of
the Robot lower body with the intention to improve its stability.
Robot Motor Re-Design:
The fourth step of the mechanical design is to exchange the
arm and elbow motors so the robot could be able to lift an objects
that weight more 5 pounds.
We also will try to re-design the Robot arm shoulders with
the purpose of reducing the robot width to 36”or less, so it can be
able to fit through a door.
|
|

