INCLINOMETRO DIGITAL
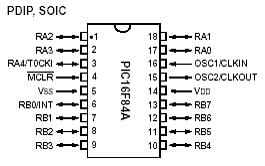
Durante el primer semestre de 2003 se construyó un Inclinometro digital usando como elementos básicos un microcontrolador PIC16F84A de Microchip y un sensor de aceleración ADXL202E de Analog Devices. También se utilizaron 2 conversores BCD a 7 Segmentos de referencia 74LS48, dos displays de 7 Segmentos, y otros elementos asociados a los anteriores.
Especificaciones: El Inclinómetro Digital está en capacidad de medir ángulos de inclinación entre -50° y 50°, con una precisión de 1° y un error máximo de 2°, refrescando el dato medido aproximadamente cada segundo.
Desarrollo: Tomemos un cuerpo cualquiera. Definamos dos ejes (x,y) que están intrínsicamente ligados al cuerpo, pues se definen en función de él. La Fuerza Gravitacional, cualquiera sea la inclinación del mismo, ejercerá una aceleración de magnitud 1G (es decir, la fuerza que produce una aceleración de una gravedad) "hacia abajo".Sin embargo, la podemos descomponer vectorialmente en dos fuerzas linealmente independientes, una paralela al eje x y otra al eje y, que llamaremos Fx y Fy, respectivamente.
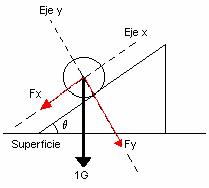 Existen relaciones matemáticas entre la Fuerza Gravitacional, sus componentes y el ángulo de inclinación:
Existen relaciones matemáticas entre la Fuerza Gravitacional, sus componentes y el ángulo de inclinación:
sen(teta)=Fx/1G
cos(teta)=Fy/1G
De donde es fácil hallar el ángulo de inclinación, nuestro objetivo final:
teta=seninv(Fx/1G)=seninv((m.ax)/(mg))=seninv(ax/g)
teta=cosinv(Fy/1G)=cosinv((m.ay)/(mg))=cosinv(ay/g)
Asi pues, nuestro trabajo se limita a medir la relación entre la aceleración que sufre el cuerpo y la gravedad, y calcular el seno o el coseno inverso. Dado que las funciones seno y coseno tienen rango [-1,1], podemos asegurar que la medición de ax o ay estara en el rango [-1G,1G]. Dadas estas especificaciones, el uso del sensor de aceleración ADXL202E se hace evidente, pues tiene una salida de rango [-2G, 2G], que es representada con un tren de pulsos cuyo ciclo de trabajo nos da la aceleración experimentada por el sensor (ver referencias en Analog)
La segunda etapa consta del microcontrolador, el cual recibe la seńal proveniente del sensor y opera sobre ella para determinar el ángulo de inclinación que corresponde a la aceleración. El tipo de operación es, claramente, el seno inverso de un numero. Dada la complejidad de esta función matemática, y a que el resultado es de tipo flotante y el PIC maneja numeros enteros, en el código assembler se hace una aproximación lineal con la cual se obtienen resultados agradables.
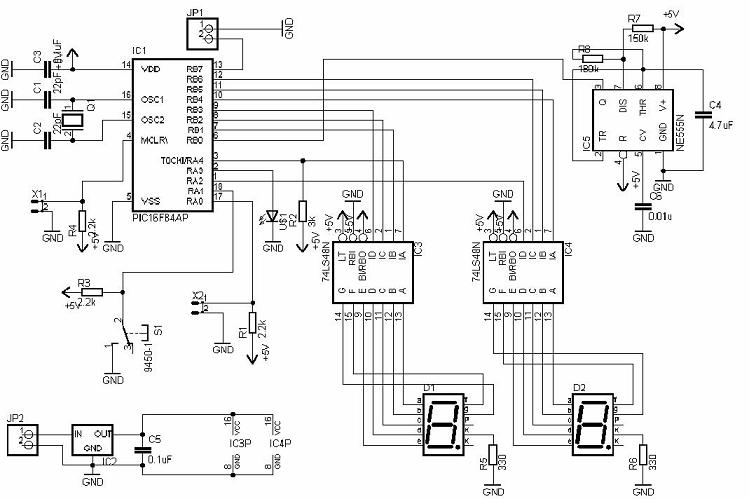
Finalmente, la tercera etapa consta de conversores BCD a 7 segmentos de referencia 74LS48 que permiten la visualización del ángulo de inclinación en dos displays. Esto se hizo necesario dada la limitada capacidad de I/O del PIC. El diagrama de todo el circuito Inclinómetro se muestra a continuación:
Resultados: El montaje físico del circuito es el siguiente:

Referencias: Las siguientes referencias fueron fundamentales para el desarrollo del proyecto...
- ADXL202E Datasheet.
- Technical Note: Using the ADXL202E accelerometer as a multifunction sensor (tilt, vibration and shock) in car alarms.
- Application Note AN-604: Using the ADXL202 Duty Cycle Output
- PIC16F84A Datasheet

