
Robotics
I always have an active robotics project sitting around my room somewhere, as well as several other electronics experiments. Plus, I have a continuously growing list of project ideas for all sorts of 'interesting' applications. The posts in this section will usually be for things that are either already built or have at least been started. There should also be a table/list of other projects that I am planning on pursuing, either in this section or the 'Other Fun Things' section.
Robotics - Project Centipede

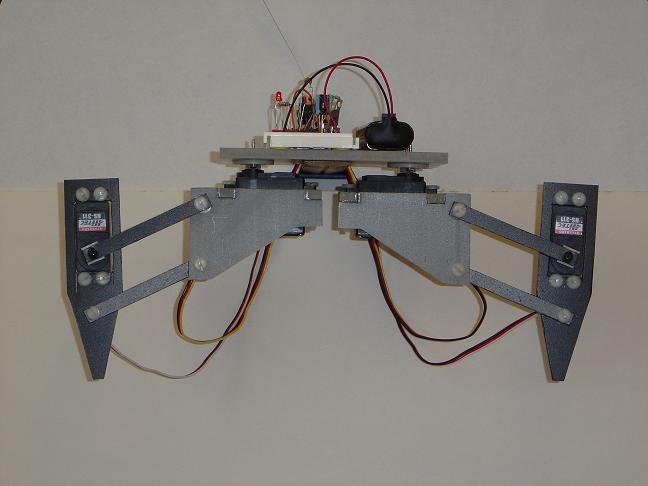
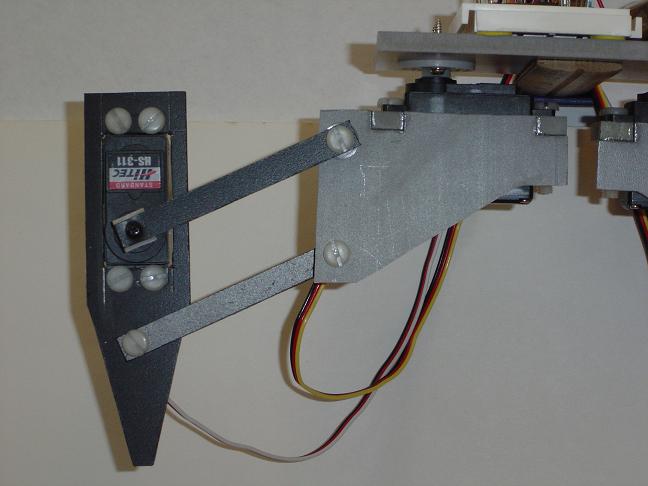
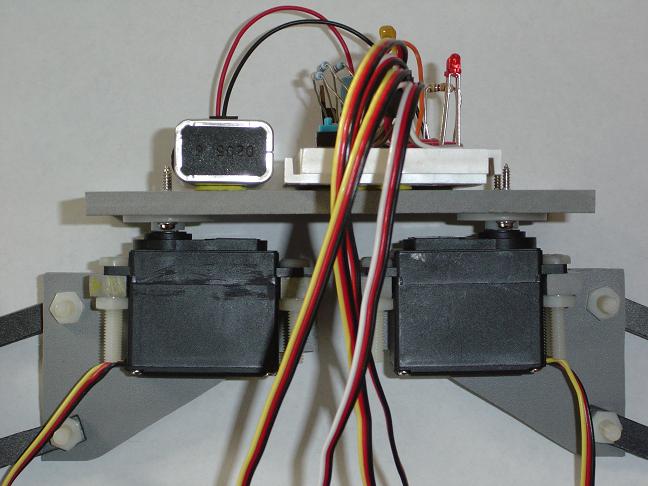
The basic concept of this project is to develop a robotic platform that can be used to test gaits and walking patterns. The model for the robot will, of course, be a centipede (or anything else you can think of with a lot of legs). Since it's a WALKING robot, it won't have any wheels or treads. It will need to get around using actual legs, or at least appendages similar to legs. The thing that makes it similar to a centipede is its layout. The legs are organized in pairs, one pair on each segment. The segments are chainable, meaning that any number of segments can be hooked together to form a longer or shorter robot. The head, which is the only unique segment, sends commands back through the pairs of legs, synchronizing their movements so that the robot moves forward, backward, etc. I might eventually end up putting some sort of infrared or feeler sensors on the front end, but at this point, that isn't a major part of the project.
Feb. 22, 2004
I started this project this past summer (2003), and it's slowly been progressing. Got the basic concept together first and then ordered some parts, like raw materials and motors. By the end of last semester, I managed to put one segment together and start playing around with programming in some walking algorithms. It can't stand up by itself, but it's a good prototype to work with. The big thing is that it has really helped me find the major flaws in the current design, so when I build a more stable model, it will work much better (and hopefully not shake itself to pieces). Below are some pictures and a video (they're both the same) of this first prototype.
Video - Forward walking motion (large - 2.7 Mb)
Video - Forward walking motion (small - 175 kb)

{kind=link}
{kind=link}
{kind=link}
{kind=link}