

| Ruhezustand |
| Master: Startbedingung |
| Master: Übertragung der Slave Adresse (RW Bit(LSB)) LOW) |
| Angesprochener Slave: ACK Zustand |
| Master: Sendet Byte(s) |
| Slave: ACK Zustand / NoAck Zustand |
| . . . |
| Master: Startbedingung |
| Master: Übertragung der Slave Adresse (RW Bit(LSB)) HIGH) |
| Slave: Sendet Byte(s) |
| Master: ACK Zustand/NoAck Zustand |
| . . . |
| Master: Stopbedingung |
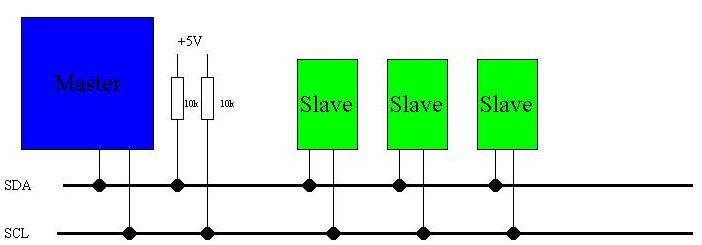
| Software dazu: | I2C Bus für die C-Control 1 |
| Hersteller /Infos : | Philips |
