SISTEMAS EXPERTOS
Un sistema experto o un sistema de conocimiento basado en reglas de
inferencias es un conjunto de programas que pueda acceder a una gran
masa de informaciones donde se reune las experiencias y conocimietos de
uno o maas expertos en un determinado campo de la ciencia o de la
tecnica para la resolicion de problemas.
UTILIZACION DEL LENGUAJE NATURAL
Las aplicaciones utilizan el lenguaje natural (natural language
processing-NLP)Realizan procesos que reciben los datos de entrada en
lenguaje natural entendiendo como tal un lenguaje escrito o hablado en
un determinado idioma y acontinuacion los procesan, produciendose la
salida tambienen lenguaje natural.
Un programa de reconocimiento de lenguaje natural consta de una base de
conocimientos que contienen un diccionario completo de palabras del
idioma del donde el objetivo del programa es el reconocimiento de las
mismas para provocar las reacciones correspondientes a cada
reconocimiento.
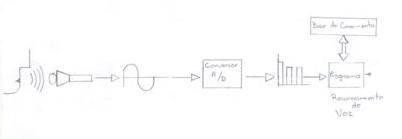
RECONOCIMIENTO DE LA VOZ
Las aplicaciones del reconocimiento de la voz tiene como
objetivo la captura, por parte de una computadora de la voz humana bien
para el tratamiento de lenguage natural para cualquier tipo de funcion
En primer lugar, la voz se calcula electronicamente con un microfono
que genera una señal analogica, para a continuacion convertirla
en una señal digital que pueda alimentar a un programa
inteligente capaz de interpretarla con exactutud. en este caso la base
de conocimiento contiene los patrones para que los programas puedan
realizar las comparaciones y se produzca el reconocimiento.
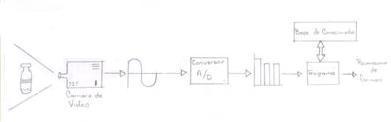
RECONOCIMIENTO DE FORMAS
Las aplicaciones de reconocimiento de formas trata de imitar la
vision humana a traves de la captacion de una imagen por medio de una
camara de video. Esta imagen produce una señal analogica que
posteriormente se digitaliza yacontinuacion se procesa por medio de un
programa inteligente que realiza las correspondientes comparaciones con
los patrones obtenidos en la base de conocimientos hasta conseguir el
reconocimiento.
ROBOTICA
Los robots son dispositivos compuestos de censores que reciben datos de
entrada y que pueden estar conectados a la computadora. Esta, al
recibir la información de entrada, ordena al robot que
efectúe una determinada acción. Puede ser que los propios
robots dispongan de microprocesadores que reciben el input de los
sensores y que estos microprocesadores ordenen al robot la
ejecución de las acciones para las cuales está concebido.
En este último caso, el propio robot es a su vez una
computadora.
Tipos de robots
Robots impulsados neumaticamente: La programación consiste en la
conexión de tubos de plástico a unos manguitos de
unión de la unidad de control neumático. Esta unidad
está formada por dos partes: una superior y una inferior. La
parte inferior es un secuenciador que proporciona presión y
vacío al conjunto de manguitos de unión en una secuencia
controlada por el tiempo. La parte superior es el conjunto de manguitos
de unión que activan cada una de las piezas móviles del
robot. Son los más simples que existen. Hay quien opina que a
este tipo de máquinas no se les debería llamar robots;
sin embargo, en ellas se encuentran todos los elementos básicos
de un robot: estas máquinas son programables, automáticas
y pueden realizar gran variedad de movimientos.
Futuro de la robótica
A pesar de que existen muchos robots que efectúan trabajos
industriales, aquellos son incapaces de desarrollar la mayoría de
operaciones que la industria requiere. Al no disponer de unas
capacidades sensoriales bien desarrolladas, el robot es incapaz de
realizar tareas que dependen del resultado de otra anterior.
En un futuro próximo, la robótica puede
experimentar un avance espectacular con las cámaras de
televisión, más pequeñas y menos caras, y con las
computadoras potentes y más asequibles.
Los sensores se diseñarán de modo que puedan medir
el espacio tridimensional que rodea al robot, así como reconocer
y medir la posición y la orientación de los objetos y sus
relaciones con el espacio. Se dispondrá de un sistema de proceso
sensorial capaz de analizar e interpretar los datos generados por los
sensores, así como de compararlos con un modelo para detectar
los errores que se puedan producir. Finalmente, habrá un sistema
de control que podrá aceptar comandos de alto nivel y
convertirlos en órdenes, que serán ejecutadas por el
robot para realizar tareas enormemente sofisticadas.
Redes Neuronales.
Las Redes Neuronales surgieron del movimiento conexionista, que
nació junto con la Inteligencia Artificial simbólica o
tradicional. Esto fue hacia los años 50, con algunos de los
primeros ordenadores de la época y las posibilidades que
ofrecían.
La Inteligencia Artificial simbólica se basa en que todo
conocimiento se puede representar mediante combinaciones de
símbolos, derivadas de otras combinaciones que representan
verdades incuestionables o axiomas.
Así pues, la Inteligencia Artificial tradicional asume que el
conocimiento es independiente de la estructura que maneje los
símbolos, siempre y cuando la 'máquina' realice algunas
operaciones básicas entre ellos. En contraposición, los
'conexionistas' intentan representar el conocimiento desde el estrato
más básico de la inteligencia:
ESTRATO FISICO.
Creen que el secreto para el aprendizaje y el conocimiento se halla
directamente relacionado con la estructura del cerebro: concretamente
con las neuronas y la interconexión entre ellas. Trabajan con
grupos de neuronas artificiales, llamadas Redes Neuronales.
La estructura
básica
de una neurona natural es:
Éstas funcionan
como sigue:
Cada neurona puede tener
infinitas entradas llamadas Dendritas que condicionan el estado de su
única salida, el Axón. Este Axón puede ir
conectado a una Dendrita de otra neurona mediante la Sinapsis
correspondiente, de la siguiente manera:
El Axón da un
nivel eléctrico correspondiente a sus entradas y a la
importancia que les da a cada una de ellas. De esta forma, una
neurona puede no reaccionar ante un nivel muy alto de una de sus
entradas, o dar una salida muy favorable cuando otra de ellas
está
mínimamente activa.
En las primeras etapas
de nuestra vida, cuando realizamos el aprendizaje de nuestros
cerebros, entrenamos nuestras neuronas mediante el éxito o
fracaso de una acción a unos estímulos sensoriales.
Cuando cierta
acción
realizada en respuesta a alguna entrada sensorial es exitosa (por
ejemplo, al beber agua calmamos la sed), las conexiones
sinápticas
entre un grupo de neuronas se fortalecen, de manera que cuando
tengamos una sensación sensorial parecida, la salida será
la correcta. De esta forma se forman fuertes conexiones entre grupos
de neuronas, que pueden servir para realizar otras acciones
complejas.
El esquema de una
neurona artificial es:

Esta neurona funciona
de la siguiente manera:
cada entrada x tiene
su
peso asociado w, que le dará más o menos importancia en
la activación de la neurona. Internamente se calcula la suma
de cada entrada multiplicada por su peso:
Con este valor de
suma
ponderada se calcula una función de activación, que
será la salida que dará la neurona. Las dos funciones
de activación más usada son el Escalón y la
Sigmoidea:
Principalmente se diferencian en que la Sigmoidea (llamada así
por su forma de S) es diferenciable en todos sus puntos y la
Escalón no.
El Perceptrón unicapa.
Un Perceptrón unicapa no es más que un conjunto de
neuronas no unidas entre sí, de manera que cada una de las
entradas del sistema se conectan a cada neurona, produciendo cada una
de ellas su salida individual:
Como se ha dicho, un conjunto de neuronas no sirve para nada
si
previamente no se le enseña qué debe hacer.
Existen tres métodos de aprendizaje para un
Perceptrón:
Supervisado, Por Refuerzo y No Supervisado.
Principalmente se
diferencian en que la Sigmoidea (llamada así por su forma de
S) es diferenciable en todos sus puntos y la Escalón no.
El Perceptrón
unicapa.
Un Perceptrón
unicapa no es más que un conjunto de neuronas no unidas entre
sí, de manera que cada una de las entradas del sistema se
conectan a cada neurona, produciendo cada una de ellas su salida
individual:
Como se ha dicho, un
conjunto de neuronas no sirve para nada si previamente no se le
enseña qué debe hacer.
Existen tres
métodos
de aprendizaje para un Perceptrón: Supervisado, Por Refuerzo y
No Supervisado.
El Perceptrón multicapa
Nacio con la
intension de dar solucion a las limitaciones del perseptrón
clasico o unicapa y supuso el resurgimiento del movimiento
conexionista. Se trate de unos cuantos (2 o 3 ) perseptrones unicapa
conectados en cascada.
Un ejemplo prectico
de un perceptrón multicapa podria ser su uso en vision
artificial. Dada su capacidad para generalizar las redes neuronales ya
han demostrado su importancia en este campo.
Se puede saber que la
red aprenda 2 o 3 formas basicas y quedada otra que no ha aprendido, la
clasifique como la mas cercana a las que conoce y ademas de un
porcentaje de lo segura que estaque esa nueva forma se paresca a una
que ha aprendido.
Sistemas
Expertos
¿Qué
es un sistemas experto?
Los sistemas expertos forman parte de un firme y verdadero avance
en inteligencia artificial. Los sistemas expertos pueden incorporar
miles de reglas. Para una persona seria una experiencia casi
"traumática" el realizar una búsqueda de reglas posibles
al completado de un problema y concordar estas con las posibles
consecuencias, mientras que se sigue en un papel los trazos de un
árbol de búsqueda. Los sistemas expertos realizan
amablemente esta tarea; mientras que la persona responde a las
preguntas formuladas por el sistema experto, este busca recorriendo las
ramas más interesantes del árbol, hasta dar con la
respuesta a fín al problema, o en su falta, la más
parecida a esta. Los sistemas expertos tienen la ventaja frente a otro
tipos de programas de Inteligencia Artificial, de proporcionar gran
flexibilidad a la hora de incorporar nuevos conocimientos. Para ello
solo tenemos que introducir la nueva regla que deseemos hacer constar y
a está, sin necesidad de cambiar el funcionamiento propio del
programa. Los sistemas expertos son "auto explicativo", al contrario
que en los programas convencionales, en los que el conocimiento como
tal está encriptado junto al propio programa en forma de
lenguaje de ordenador. Los expertos de I.A. dicen que los sistemas
expertos tienen un conocimiento declarativo, mientras que en los
demás programas es procedural.
HISTORIA DE LOS (SE)
Sus inicios datan a mediados de los años sesenta. Durante esta
década los investigadores Alan Newell y Herbert Simon
desarrollaron un programa llamado GPS (General Problem Solver;
solucionador general de problemas). Podía trabajar con
criptoaritmética, con las torres de Hanoi y con otros problemas
similares. Lo que no podía hacer el GPS era resolver problemas
del mundo real, tales como un diagnóstico médico.
Algunos investigadores decidieron entonces cambiar por completo el
enfoque del problema restringiendo su ambición a un dominio
específico e intentando simular el razonamiento de un experto
humano. En vez de dedicarse a computarizar la inteligencia general, se
centraron en dominios de conocimiento muy concretos. De esta manera
nacieron los SE.
A partir de 1965, un equipo dirigido por Edward Feigenbaum,
comenzó a desarrollar SE utilizando bases de conocimiento
definidas minuciosamente. Dos años
más tarde se construye DENDRAL, el cual es considerado como el
primer SE. La ficción de dicho SE era identificar estructuras
químicas moleculares a partir de su análisis
espectrográfico.
En la década de los setenta se desarrolló MYCIN para
consulta y diagnóstico de infecciones de la sangre. Este sistema
introdujo nuevas características: utilización de
conocimiento impreciso para razonar y posibilidad de explicar el
proceso de razonamiento. Lo más importante es que funcionaba de
manera correcta, dando conclusiones análogas a las que un ser
humano daría tras largos años de experiencia. En MYCIN
aparecen claramente diferenciados motor de inferencia y base de
conocimientos. Al separar esas dos partes, se puede considerar el motor
de inferencias aisladamente. Esto da como resultado un sistema
vacío o shell (concha). Así surgió EMYCIN (MYCIN
Esencial) con el que se construyó SACON, utilizado para
estructuras de ingeniería, PUFF para estudiar la función
pulmonar y GUIDON para elegir tratamientos terapéuticos.
En esa época se desarrollaron también: HERSAY, que
intentaba identificar la palabra hablada, y PROSPECTOR, utilizado para
hallar yacimientos de minerales. De este último derivó el
shell KAS (Knowledge Adquisition System).
En la década de los ochenta se ponen de moda los SE,
numerosas
empresas de alta tecnología investigan en este área de la
inteligencia artificial, desarrollando SE para su
comercialización. Se llega a la conclusión de que el
éxito de un SE depende casi exclusivamente de la calidad de su
base de conocimiento. El inconveniente es que codificar la pericia de
un experto humano puede resultar difícil, largo y laborioso.


