

 Dans cet extrait de vidéo de l'alunissage d'Apollo 11, le LEM opére un changement brutal incohérent d'attitude alors qu'il est assez proche de la lune.  Dans la vidéo de l'alunissage d'Apollo 15, non seulement le LEM a une attitude incohérente, mais de plus sa trajectoire fait un brutal angle droit alors qu'il est pręt de se poser.  Et lorsque le LEM décolle (la partie ascendante), au lieu de d'élever verticalement, il part anormalement en oblique (alors que le LEM est bien horizontal).  Dans la vidéo de l'alunissage d'Apollo 16, le LEM semble ętre filmé par une caméra qui est indépendante de lui, et placée ŕ l'extérieur; pourtant la caméra est supposée ętre montée sur le LEM (ŕ moins que ce soient des extra-terrestres qui filment!). Quelqu'un m'a dit que c'était l'ombre du lem, mais cela ne ressemble pas ŕ l'ombre du lem pour moi. Cette ombre semble trop précisément découpée, elle serait plus floue si c'était l'ombre du lem; de plus, les pieds sont trop clairs, pas assez sombres; et nous pouvons aussi voir l'ombre des pattes; on m'a dit que c'était les ombres des tiges d'arrimage, mais elles semblent trop longues pour ętre les ombres de ces tiges. Si nous faisons une comparaison entre l'alunissage d'Apollo 16 (ŕ gauche) et l'alunissage d'Apollo 17 (ŕ droite):  Ils semblent assez différents. L'ombre du lem est plus sombre et plus imprécise dans Apollo 17.  Et lorsque le module lunaire décolle dans Apollo 16, pouvez vous m'expliquer pouquoi il y a toute cette brume dans un environnement qui est censé ętre le vide???  Cette vidéo, dans laquelle nous voyons le module lunaire tourner soudainement d'une attitude horizontale vers une attitude verticale juste avant d'alunir, n'a aucun sens, car, lorsque le module lunaire est proche de la surface lunaire, il a une faible vitesse horizontale, et a donc perdu la force centrifuge qui lui permettait de contrer l'attraction lunaire, et il ne bénéficie pas non plus de la force de l'air comme un avion ou un hélicoptére sur terre, ce qui signifie qu'il ne peut la contrer qu'avec son réacteur principal, et il doit absolument avoir une attitude verticale pour que son réacteur principal puisse contrer l'attraction lunaire; ses réacteurs latéraux ne permettent que des maneuvres de rotation et translation, mais il ne sont pas assez puissants pour contrer l'attraction lunaire (et de plus leur poussée ne peut pas ętre ajustée). Si le module lunaire volait avec une attitude horizontale, il ne pourrait contrer l'attraction lunaire, serait attiré par la lune, et s'écraserait dessus. Et, męme si les réacteurs latéraux avaient été assez puissants pour contrer l'attraction lunaire (et que leur poussée avait pu ętre ajustée pour exactement contrer l'attraction lunaire), le module lunaire n'aurait pas pu rester parfaitement stable comme ce que nous voyons sur la vidéo lorsqu'il a tourné de l'attitude horizontale vers la verticale. Cette vidéo n'a donc pas le moindre sens, elle est physiquement impossible.  Nous pouvons aussi voir cette rotation trop tardive et brusque du LEM dans la vidéo de l'alunissage d'Apollo 12. |
 Ceci est la vidéo qui montre l'alunissage du LEM dans Apollo 16. Les fans d'Apollo prétendent que la forme noire que nous voyons dans la vidéo est l'ombre du LEM sur le sol lunaire; et je dis que ce n'est pas elle, que c'est un modčle qui se tient debout ŕ la place. J'ai mené une analyse qui tend ŕ prouver ce que j'affirme.  Cette animation montre comment l'ombre du LEM bouge alors que le LEM alunit; l'ombre du LEM approche progressivement du point d'alunissage du LEM, et, si elle garde la męme taille, par le fait qu'elle vient plus prčs de la caméra, la caméra la voit de plus en plus grosse alors que le LEM s'approche du sol lunaire.  Je considčre les lignes grises que j'ai cerclées comme étant les ombres des pattes de ce que je considčre ętre un modčle du LEM; mais les fans d'Apollo considčrent eux que ce sont les ombres des sondes du LEM. Les sondes pendent verticalement sous le LEM et sont destinées ŕ détecter le sol lunaire un peu avant que le LEM ne touche lui-męme le sol lunaire; elles avertissent le systčme du LEM que le sol lunaire est proche, sur quoi des lampes s'allument sur les panneaux du LEM qui avertissent l'astronaute qu'il doit couper le réacteur avant l'alunissage effectif.  Mais nous voyons que la direction de ces "sondes" est différente de la direction de l'axe vertical du LEM sur "l'ombre".  Sur cette partie de la vidéo, "l'ombre" ne bouge pratiquement pas et ne grossit pas non plus, ce qui montre que le LEM ne bouge pas verticalement; pourtant nous voyons clairement des artéfacts de la lune bouger sous le LEM; donc, logiquement, le LEM doit bouger horizontalement. Mais cette séquence se place juste avant l'alunissage, et le LEM doit absolument ętre parfaitement immobile horizontalement quand il alunit sur la lune.  Si le LEM bougeait horizontalement quand il alunit, il tomberait quand il toucherait le sol.  Sur cette séquence, nous voyons un pied de la forme s'avancer tandis que l'autre pied ne bouge pratiquement pas; pourtant, ils devraient bouger de la męme maničre...ŕ moins que la forme ne fasse une rotation, mais, dans ce cas, si c'est effectivement l'ombre du LEM, cela signifie que le LEM fait aussi une rotation, et, dans ce cas, l'ombre du LEM ne resterait pas au męme endroit sur la vidéo, mais se déplacerait ŕ un autre endroit.  Sur ces deux images prises ŕ deux moments différents de la vidéo, nous voyons le męme artéfact sur le sol; cet artéfact n'est pas toujours visible, car, parfois, il y a trop de brouillard qui cache le sol lunaire. Nous voyons que, sur la seconde image, la taille de la forme a augmenté; mais la taille de l'artéfact n'a pas grossi de maničre correspondante, elle a grossi moins que la forme entre les deux images.  Ceci est maintenant une comparaison entre une image au début de la vidéo et une image un peu avant la fin de la vidéo. Nous voyons encore le męme artéfact sur les deux images. Cette fois, la forme est sensiblement plus grosse, elle a plus que doublé entre les deux images. L'artéfact lunaire a aussi grossi mais pas autant que la forme; contrairement ŕ la forme, sa taille n'a pas doublé. Normalement, si la forme était effectivement l'ombre du LEM, cela signifie qu'elle serait au męme niveau que l'artéfact lunaire, et les deux grossiraient de la męme maničre; si la forme grossit plus vite que l'artéfact lunaire, cela signifie qu'elle est plus proche de la caméra du LEM que l'artéfact lunaire, ce qui confirme mon affirmation que ce n'est pas l'ombre du LEM, mais une structure se tenant debout ŕ la place, un modčle du LEM. |
 Lorsque le module lunaire revient vers le module de commande, il suit une sorte de parabole le long de laquelle il tourne lentement et réguličrement d'une attitude verticale vers une attitude horizontale. Initialement, il a une attitude verticale, car il doit d'abord gagner une vitesse verticale, puis il tourne lentement vers une attitude horizontale qui lui permet de tourner autour de la lune; le module commande tourne autour de la lune ŕ une altitude de 110km.  C'est l'attitude du module lunaire qui lui permet de distribuer la force créée par son réacteur suivant les axes horizontal et vertical; plus il est vertical, et plus il donne une force verticale, et inversement, plus il est horizontal, et plus il donne une force horizontale.  Le module lunaire ne peut pas se permettre de faire des maneuvres inutiles, car il doit ętre sűr d'avoir assez de carburant restant pour les maneuvres finales; s'il gaspillait inutilement du carburant, cela pourrait résulter dans un manque de carburant avant la maneuvre finale, et alors il serait incapable de s'arrimer au module de commande, et il tournerait autour de la lune pour toujours.  Initialement, au début de la trajectoire, le module lunaire a une attitude verticale.  Cette vidéo est supposée montrer le module lunaire (partie ascendante) décollant de la lune, laissant l'étage de descente sur la lune. La plupart des gens croient que cette vidéo montre vraiment un module lunaire quittant la lune.  Cette image est extraite de la vidéo. Quels sont ces tâches colorées que nous voyons sur la vidéo? Est-ce un décollage sur la lune ou un feu d'artifice? Les feux d'artifice fonctionnent parce que l'oxygčne permet de maintenir l'incandescence des morceaux projetés; ici, dans le vide de la lune, les morceaux projetés devraient immédiatement s'éteindre.  Mais il y avait en fait une complication. En effet, pour avoir une progression réguličre de module lunaire, la poussée du réacteur devrait ętre parfaitement alignée avec le centre de gravité du module lunaire.  Dans le module de descente, lorsqu'il y avait un désalignement du centre de masse lors de la descente, alors que les réservoirs se vidaient, ce désalignement pouvait ętre corrigé en faisant pivoter le moteur de descente.  Mais tel n'était pas le cas dans le module de remontée. Dans le module de remontée, les réservoirs étaient disposés, en prenant en compte leurs densités respectives, et aussi le reste de la structure, de maničre ŕ ce que le centre de masse soit initialement aligné avec la poussée du moteur principal.  Mais cet équilibre ne pouvait ętre conservé tout au long de la remontée; alors que les réservoirs se vidaient, la structure avait une influence de plus en plus grande sur l'équilibre des forces, et le centre de masse se décalait progressivement de la ligne de poussée.  Le fait que le centre de gravité était décalé par rapport ŕ la ligne de poussée aurait éventuellement pu ętre corrigé si le réacteur de remontée avait pu ętre pivoté, comme le réacteur de descente, ce qui aurait permis de réaligner le centre de gravité du module avec la ligne de poussée, et ainsi éviter le couple gęnant. Mais, curieusement, alors que le mdoule de descente avait la possibilité de pivoter son réacteur, le module de descente n'avait pas cette possibilité, et pourtant il en aurait eu plus besoin que le réacteur de descente. Cela signifie que le décalage du centre de gravité relativement ŕ la ligne de poussée ne pouvait ętre corrigé, et le résultat est que la poussée du réacteur principal générait un couple qui faisait tourner le module dans le sens des aiguilles d'une montre. Si ce couple n'avait pas été corrigé, le module lunaire aurait entamé une pirouette fatale qui l'aurait fait s'écraser sur la lune.  La seule maničre de contrer ce couple était donc de créer un contre-couple avec les réacteurs latéraux. Toutefois la poussée des réacteurs latéraux ne pouvait pas ętre ajustée; ils ne créaient pas un couple équivalent au couple qui aurait été nécessaire pour contrer le couple causé par le désalignement du centre de gravité. Cela signifie qu'ils ne pouvaient ętre mis ŕ feu de maničre permanente, mais périodiquement.  S'ils avaient été contrôlés avec une fréquence suffisante, le couple aurait pu ętre contré de maničre assez souple, en dépit du fait que leur poussée n'était pas ajustable. Mais le guidage du module lunaire avait une période assez conséquente, de deux secondes, ce qui était largement insuffisant pour assurer un contrôle du couple en souplesse.  Le résultat est que le module lunaire ne pouvait éviter d'avoir un mouvement oscillatoire notable dans son ascension aprčs un certain temps, quand l'équilibre des forces commençait ŕ ętre rompu. Le couple créé par le désalignement du centre de gravité faisait tourner le module lunaire dans le sens des aiguilles d'une montre, et le poussait vers la droite; puis, lorsque les réacteurs latéraux étaient mis ŕ feu, le contre couple faisait tourner le module lunaire dans le sens inverse et le poussait vers la gauche; puis les réacteurs latéraux étaient éteints, cela repartait dans l'autre sens, et ainsi de suite... Le temps de réaction des réacteurs latéraux était suffisamment lent pour que l'amplitude du mouvement sinusoďdal soit assez notable. Lorsque le décalage du centre de masse était léger, l'amplitude restait modérée, mais plus ce décalage augmentait durant la remontée, et plus l'amplitude du mouvement sinusoďdal devenait importante.  Clavius, sur son site, ne conteste pas ce problčme; il parle du déséquilibre qui se produit au cours de la remontée, et dit que cela explique le mouvement sinusoďdal que nous voyons sur la vidéo de l'ascension du module lunaire, car il l'a lu dans la description de l'ascension.  Donc, en fait, alors que le module lunaire suit sa parabole ascensionnelle, il ferait un mouvement sinusoďdal de plus en plus prononcé autour de cette trajectoire, et cela ressemblerait ŕ quelque chose comme ceci. Le fait que le module lunaire ait constamment ŕ contrer le couple de désalignement avec des réacteurs latéraux signifie qu'il va consommer une importante quantité de carburant de ses réacteurs latéraux.  Pourtant, ce n'est pas l'intéręt du module lunaire de gaspiller ce carburant, car il en aura besoin lorsqu'il doit faire sa maneuvre finale de retournement pour s'arrimer au module de commande. Si le module lunaire manquait de carburant pour ses réacteurs latéraux avant d'atteindre l'orbite du module de commande, cela signifie qu'il serait incapable de faire la maneuvre finale pour faire la jonction avec le module de commande, ce serait embarrassant! Maintenant, quelles conclusions pouvons nous tirer de ce que nous voyons sur l'ascension du module lunaire dans Apollo 17? 1) Si vous observez la maničre dont le module lunaire tourne, il est trčs clair que le plan de son ascension est perpendiculaire au plan de la caméra (c'est spécialement visible ŕ la maničre dont son panneau arričre tourne). Et la trajectoire du module lunaire reste dans ce plan durant toute la phase initiale. 2) Puis nous voyons le module lunaire descendre; bien sűr, cela vient probablement du fait que la caméra tourne verticalement, mais pourquoi l'opérateur a t-il tant tardé avant de tourner la caméra? Il attend une dizaine de secondes avant de tourner la caméra, lorsque le module lunaire est sur le point de quitter l'image sur le haut, avant de tourner la caméra, alors qu'il y a un délai de 2,5 secondes entre une commande qu'il envoie et le résultat que l'on voit sur la vidéo. Donc, s'il avait normalement manipulé la caméra, le module lunaire n'aurait jamais du ętre ŕ plus d'un quart de la hauteur de l'image du milieu de l'image. 3) Puis nous voyons le module lunaire bouger horizontalement, mais il bouge horizontalement dans un plan qui est parallčle au plan de la caméra, alors que la trajectoire était initialement dans un plan perpendiculaire au plan de la caméra, et ceci sans transition! Ceci est absolument impossible, le module lunaire ne peut pas brutalement changer d'un plan vers un plan qui lui est perpendiculaire; il est physiquement impossible de convertir instantanément une vitesse horizontale en une vitesse qui lui est perpendiculaire! 4) Puis le module lunaire commence brutalement ŕ faire un mouvement oscillatoire, alors qu'il n'en montrait pas auparavant; ce n'est pas possible, le centre de masse n'est pas brutalement décalé de la ligne de poussée, ce décalage est progressif; l'amplitude du mouvement oscillatoire devrait donc progressivement s'accroître, et non ressembler ŕ ce que nous voyons sur la vidéo. Vous pourriez dire que c'était moins visible lorsque le module lunaire ne se déplaçait pas dans le męme plan, mais nous aurions quand męme vu des variations d'altitude; il n'est pas crédible que l'opérateur aurait pu compenser ces variations avec des mouvements de la caméra, étant donné le délai entre son action sur la caméra et le résultat qu'il voit. Nous avons donc ici une incroyable accumulation d'absurdités, qui discréditent complčtement cette ascension.  Et il y a une autre vidéo encore plus intéressante du décollage, filmée depuis le module lunaire cette fois. La caméra qui filme cette vidéo a une position fixe relativement au module lunaire, car nous voyons un coin du hublot du module toujours au męme endroit sur la vidéo; cela signifie que, lorsque la vue de la caméra tourne, le module lunaire en fait autant.  Au début de la vidéo, nous voyons l'ombre du module lunaire se déplacer sur la vidéo.  En fait, l'ombre du module lunaire est projetée le long de la direction du soleil qui ne change pas durant l'ascension du module lunaire. Cela signifie que, aussi longtemps que le module lunaire reste vertical, la caméra verra l'ombre sous le męme angle, et ainsi l'ombre du module restera au męme endroit sur la vidéo, et rapetissera simplement avec la distance. L'étage de descente restera aussi au męme endroit sur la vidéo, s'il est visible dessus.  Vous pourriez dire: Peut-ętre que le module a déjŕ commencé de tourner, ce qui expliquerait que l'ombre du module bouge sur la vidéo. Mais, en fait, sur certaines images, nous voyons ŕ la fois l'étage de descente et l'ombre du module, et nous voyons que la distance qui les sépare reste constante sur ces images, ne s'accroît pas. Si le module lunaire avait déjŕ commencé de tourner vers l'horizontale, il aurait alors une vitesse horizontale qui l'éloignerait de l'étage de descente; l'angle sous lequel il voit l'étage de descente changerait, et cela ferait s'accroître la distance entre l'étage de descente et l'ombre du module sur la vidéo; le fait que cette distance ne change pas sur la vidéo prouve que le module lunaire est encore verticalement au-dessus de l'étage de descente ŕ ce point de la vidéo, et ne se déplace pas encore horizontalement. Donc, au lieu de voir ceci au début de la vidéo, l'ombre du module traversant le champ de vue de la caméra...  ...Nous devrions voir ceci: L'ombre du module gardant la męme position sur la vidéo, et simplement rapetissant.  En fait, ce que nous voyons sur la vidéo montre ceci: Alors que l'étage de descente est encore au dessus de la verticale de l'étage de descente, au lieu de rester avec une attitude verticale comme il le devrait, il tourne de sorte que l'ombre du module traverse d'abord le champ de vue de la caméra, et puis l'étage de descente apparaît et traverse le champ de vue de la caméra ŕ son tour.  Puis, sur la derničre partie de la vidéo, nous voyons l'étage de descente se comporter de maničre erratique. Au lieu de se déplacer de maničre réguličre continue sur la vidéo comme il le devrait, il bouge de maničre complčtement irréguličre: Il bouge, s'arręte, puis bouge ŕ nouveau, puis s'arręte...L'ascension du module lunaire est telle qu'elle ne pourrait en aucune maničre donner ce mouvement irrégulier de l'étage de descente que nous voyons sur la vidéo.  Une fois de plus, nous nageons en pleine fantaisie! |
 Alors que les astronautes cherchent un endroit pour alunir, lorsqu'ils sont proches du sol lunaire, ils doivent constamment maintenir la poussée du reacteur. Pourquoi? Parce qu'ils ont constamment ŕ contrer l'attraction lunaire pour maintenir le LEM au dessus du sol lunaire; en effet, ils ne disposent plus de la vitesse horizontale créant une force centrifuge permettant de contrer l'attraction lunaire. Et, plus ils tarderont ŕ alunir, et plus ils brűleront du carburant. Et ils ne savent pas ŕ l'avance combien cette phase prendra de temps. Et, sur la lune, pas de sauveteurs, et pas de pompes ŕ essence. Et ils doivent aussi conserver assez de carburant pour le retour vers le module de commande! Dans ces conditions, il est absolument évident qu'ils auront ŕ mettre toutes les chances de leur côté en évitant de gaspiller inutilement du carburant avant de s'approcher de la lune! Faire les clowns avant de commencer réellement le voyage vers la lune pourrait leur coűter leurs vies! Ceci est spécialement vrai lorsque nous savons que Neil Armstrong était pratiquement ŕ court de carburant lorsqu'il a aluni. Voici ce que nous pouvons trouver dans le récit de son vol: "Des messages d'avertissement parvinrent de la terre; ŕ peine 60 secondes de carburant restant avant que l'alunissage doive ętre avorté". Donc, il était pratiquement ŕ court de carburant, carburant qu'il ne pouvait pas reconstituer sur la lune, et il aurait néanmoins pris la fantaisie de voler au cessus du module de commande?  En fait, ceci est le genre de manoeuvre qui aurait été faite. Le module de commande, avec le module lunaire attaché, tournerait d'abord en position verticale. Puis le module de commande descendrait pour permettre la manoeuvre du module lunaire. Puis le module lunaire tournerait dans le sens des aiguilles d'une montre vers une attitude horizontale pour se préparer au voyage vers la lune. Aprčs une pause permettant au module de commande d'inspecter le module lunaire, et de s'assurer que toutes les pattes du module se sont bien déployées, le module lunaire met ŕ feu son réacteur pour décroître sa vitesse orbitale de la quantité nécessaire (~75 pieds/s) pour se placer sur l'orbite de transfert. Quelqu'un m'a dit que le fait que le module lunaire était sous le module lunaire permettait d'économiser du carburant du module lunaire.  Mais c'est faux. Si le module de commande tourne dans le sens opposé, avec le module lunaire vers le bas au lieu de vers le haut, le module de commande monte pour permettre la manoeuvre du module lunaire, le module lunaire tourne dans le sens trigonométrique vers une attitude horizontale pour se préparer au voyage vers la lune, et, aprčs une pause permettant au module de commande d'inspecter le module lunaire, le module lunaire met ŕ feu son réacteur pour réduire sa vitesse orbitale. Nous avons une manoeuvre équivalente qui ne fait pas dépenser une goutte de carburant de plus au module lunaire que dans la manoeuvre précédente. L'argument de l'économie du carburant n'est donc pas un argument valable pour justifier la manoeuvre que nous voyons dans Apollo 11.  En réalité, la séparation était faite bien avant le DOI (réduction de la vitesse orbitale du module lunaire), une demie-orbite avant (et cela prend presque une heure au module de commande pour parcourir une demie orbite). Mon animation ne montre donc pas la manoeuvre de séparation correcte; il y a un temps trop court entre la sépération et le DOI sur mon animation.  Mais, si le module de commande reste sous le module lunaire pendant une demie orbite, et que les deux vaisseaux spatiaux orbitent avec leurs vitesses orbitales normales, le module de commande ne va pas rester sur la verticale du module lunaire, mais va se décaler horizontalement ŕ la place, et prendre de l'avance sur le module lunaire. En effet, comme le module de commande est un peu plus prčs de la lune, sa vitesse orbitale est légčrement plus grande que celle du module lunaire; de plus, męme s'il avait la męme vitesse orbitale, il se décalerait quand męme relativement au module lunaire, car il aurait une vitesse angulaire plus grande.  Donc, ŕ la fin de la demie orbite, si les deux vaisseaux spatiaux orbitent avec leurs vitesses orbitales normales, le module de commande se serait décalé relativement au module lunaire, et l'appareil photo de l'astronaute ne le verrait plus sous le module lunaire. Eventuellement, l'appareil photo pourrait capter le module de commande sur l'extręme gauche s'il était tourné.  Maintenant, le module de commande peu aussi manoeuvrer de maničre ŕ rester sur la verticale du module de commande, mais alors sa vitesse horizontale serait inférieure ŕ la vitesse orbitale requise, ce qui signifie que la gravité le tirerait vers le bas. le module de commande commencerait de descendre, et graduellement de plus en plus vite.  Ceci est d'ailleurs confirmé par la photo AS11-37-5447, sur laquelle nous voyons le module de commande assez distant du module lunaire. Selon la documentation de la NASA, le module de commande descendrait jusqu'ŕ un demi mille en dessous du module lunaire. Mais le module de commande acquiert également un peu de vitesse verticale tout au long de la demie orbite, laquelle il devra contrer. Maintenant, y a t-il vraiment un avantage pour de module de commande de manoeuvrer de cette maničre... ...plutôt que de la maničre que je préconise, qui est de tourner le module lunaire vers le bas, tourner le module lunaire dans le sens trigonométrique, et, aprčs une pause de quelques secondes pour l'inspection du module lunaire par le module de commande, faire le module lunaire ralentir sa vitesse orbitale? Dans ma solution, le module de commande ne consomme pas de carburant durant la demie orbite, il suit simplement son orbite avec sa vitesse orbitale naturelle. Dans ma solution, le module de commande peut examiner le module lunaire contre le fond lumineux de la lune. Dans ma solution, lorsque le module luinaire réduit sa vitesse orbitale (DOI), il est proche du module de coimmande, et le module de commande peut facilement le suivre pendant qu'il fait sa manoeuvre. Dans la solution de la NASA, le module de commande doit brűler du carburant tout au long de la demie orbite pour rester sur la verticale du module lunaire, car il se décalerait horizontalement sans contrôle effectué (ŕ cause de la vitesse angulaire s'accroissant, ce qui force ŕ diminuer la vitesse horizontale pour rester sur la verticale du module lunaire). Ce n'est pas un quantité importante de carburant, mais c'est tout de męme du carburant inutilement brűlé.  Dans la solution de la NASA, le module de commande devra inspecter le module lunaire contre le noir de l'espace, dans des conditions de luminosité moins bonnes que dans ma solution, et il devra le faire peu aprčs la séparation,. Lorsque le module lunaire met ŕ feu son réacteur pour diminuer sa vitesse orbitale, le module de commande en est trop éloigné pour faire une inspection du module lunaire. Dans la solution de la NASA; le module de commande est nettement plus éloigné du module lunaire que dans ma solution, ce qui signifie qu'il aura plus de mal ŕ le suivre lorsqu'il réduit sa vitesse orbitale en mettant ŕ feu son réacteur.  Dans la solution de la NASA, le module de commande a une vitesse verticale ŕ la fin de la demie orbite qui doit ętre contrée, en mettant ŕ feu soit le réacteur principal, soit les réacteurs latéraux (ce sera plus long avec les réacteurs latéraux).  Dans la solution de la NASA, le module de commande a couramment une vitesse orbitale trop faible ŕ la fin de la demie orbite, ce qui signifie qu'il devra l'accroître pour retourner ŕ son orbite originelle (ŕ moins qu'il ne décide de rester sur son orbite finale, mais il devra quand męme augmenter sa vitesse orbitale).  Cela signifie qu'il n'y a pas le moindre avantage ŕ manoeuvrer le module de commande et gérer la séparation de cette maničre, rien que des inconvénients: Gaspillage de carburant, moins bonne inspection et moins bon suivi du module lunaire. Cette manoeuvre est manifestement ŕ considérer comme une plaisanterie de la part des ingénieurs de la NASA. |
 Je vais aussi parler de séquences que j'ai vues dans le fim "In the shadow of the moon". Cette séquence est extraite de ce film. Elle montre le module lulaire entamant sa descente vers la lune.  Pour initier sa descente vers la lune, selon la NASA (et confirmé par mes propres calculs), le module lunaire décroît sa vitesse horizontale d'environ 75 pides/s (~80 km/h) de maničre ŕ se placer sur l'orbite de tranfert qui l'amčne plus prčs de la lune, sur une orbite depuis laquelle il va commencer sa descente motorisée. Cela signifie que le module lunaire va d'abord initialement aller en arričre du module de commande. Mais, sur cette séquence, le module lunaire n'apparaît pas ętre en arričre du module de commande; de la maničre dont il est orienté, il devrait bouger vers le haut de l'image; s'il ne le fait pas, comme la caméra ne bouge pas relativement ŕ la fenętre, il ne peut y avoir qu'une seule explication: Le module de commande est en train de tourner pour suivre le module lunaire. D'ailleurs, vous observerez que nous voyons l'horizon lunaire ŕ la fin de la séquence, ce qui confirme que le module de commande est en train de tourner. Ce qui est surprenant est la remarquable stabilité du module lunaire sur l'image, que le module de commande puisse le suivre si parfaitement. En fait, la stabilité remarquable du module lunaire sur l'image n'est pas le point dont je désire vraiment parler; c'est plutôt au sujet de l'attitude du module lunaire telle que vue depuis le module de commande dont je désire parler.  Le fait que le module de commande tourne pour suivre le module lunaire, qu'il séme, est que son champ de vue tourne relativement au module lunaire. Mais, si le champ de vue du module de commande tourne relativement au module lunaire, cela signifie également inversement que le module lunaire tourne relativement au champ de vue du module de commande.  Maintenant, si je fais une autre animation montrant comment le module luinaire apparaît dans le systčme de référence du module de commande (faisant que l'angle de vue de module de commande a une orientation fixe dans ce systčme de référence), nous voyons que le module lunaire apparaît tournant relativement au champ de vue du module de commande. Ceci signifie que le module de commande ne devrait pas avoir une attitude constante dans cette séquence, et qu nous devrions voir cette attitude changer tout au long de la séquence. Ceci est un signe trčs clair que cette séquence a été fabriquée et n'est pas réelle.  Cette séquence est aussi extraite du film "In the shadow of the moon". Elle montre le module lunaire en train de retourner vers le module de commande.  Normalement, le module lunaire devrait revenir vers l'orbite du module de commande selon un arc parabolique, et cette figure extraite d'un document de la NASA le confirme. Le module lunaire a une vitesse angulaire plus importante que celle du module de commande alors qu'il revient vers l'orbite du module de commande. Normalement, si l'attitude du module de commande était fixe, nous verrions le module lunaire bouger sur l'image; au lieu de cela, il reste au męme endroit suir l'image tout au long de la séquence; la seule explication possible est que le module de commande tourne pour suivre le module lunaire Nous pouvons ŕ nouveau nous étonner que le module de commande puisse suivre si parfaitement le module lunaire. Mias, une fois de plus, je m'interesse davantage ŕ l'attitude du module lunaire. Comme sur la séquence du départ du module lunaire vers la lune, nous devrions voir une variation de l'attitude du module lunaire. Pourtant, l'attitude du module lunaire ne change pas du tout, et apparaît verticale tout au long de la séquence. En bref, les séquences du module lunaire dans l'espace ne sont pas trčs convaincantes. |
 Ce dont je vais parler est décrit dans le document suivant: Lien vers le document de la NASA La premičre phase de la descente consiste ŕ aller vers une orbite plus basse ŕ partir de laquelle les différentes phases de l'alunissage vont ętre successivement réalisées (en commençant par la phase de ralentissement). Ils disent que, pour descendre vers l'orbite plus basse, le LEM réalise une DOI, une courte maneuvre rétrograde qui lui permettrait de perdre 75 pieds par seconde de vélocité horizontale de maničre ŕ avoir la vélocité orbitale sur l'orbite plus basse. Voyons si cela correspond avec la réalité. Sur le dessin du document de la NASA, la trajectoire du module lunaire paraît trčs elliptique. Mais ils ont triché, car ils ont plus qu'exagéré la distance entre le module de commande et la lune; ils font croire que le module de commande était ŕ une distance de la lune équivalente ŕ son rayon.  En fait, le module de commande était ŕ une distance de la lune correspondant ŕ un seizičme de son rayon. Je montre ici ŕ quoi son orbite autour de la lune ressemblait en réalité, j'ai bien sűr exagéré la taille du module de commande pour qu'il soit visible. Cela signifie que la trajectoire du module lunaire était presque circulaire, trčs légčrement elliptique. En fait ils ont grossi les distances ŕ la lune pour rendre le problčme plus clair. Sur leur dessin, la trajectoire elliptique du module lunaire ressemble aux trajectoires elliptiques de satellites autour de la terre.  Toutefois, la trajectoire elliptique de satellites autour de la terre répond ŕ une régle bien précise: Le centre de la terre est l'un des foyers de l'ellipse du satelllite. Lorsque la trajectoire du satellite est circulaire, le centre de la terre est aussi le centre de la trajectoire circulaire.  Maintenant, les foyers de l'ellipse qu'ils montrent peuvent ętre calculés; si nous appelons "a" le demi grand axe de l'ellipse, "b" le demi petit axe, et "c" la distance des foyers au centre de l'ellipse, nous avons la relation bien connue: c˛=a˛-b˛. Ceci nous permet de placer les deux foyers sur le grand axe de l'ellipse; je les montre avec des croix rouges. Je montre avec une croix verte le centre de la lune. Et maintenant nous avons un gros problčme: La croix verte devrait coďncider avec l'une des deux croix rouges, et bien loin de lŕ, comme vous pouvez le constater. L'ellipse suivie par le module lunaire n'est pas une orbite elliptique normale de satellite.  A présent je déplace la lune de sorte que son centre coďncide avec un foyer de la trajectoire du module lunaire, de sorte que la trajectoire du module lunaire devienne une trajectoire normale de satellite. Et vous voyez le problčme? Cela ferait que le module lunaire percuterait la lune!  Si le centre de la lune est loin de tout foyer de l'ellipse sur leur dessin, c'est parce que leur ellipse est trop aplatie. L'ellipse doit ętre plus proche d'un cercle de sorte que le centre de la lune devienne un foyer de cette ellipse, comme sur ce dessin que j'ai corrigé. En fait, parce que le module lunaire est bien plus proche de la lune que montré sur le dessin du document, la trajectoire du module lunaire est trčs proche d'un cercle, trčs trčs légčrement elliptique.  Selon la loi de Kepler, la vitesse orbitale sur une orbite elliptique de la lune est égale ŕ: V=RacineCarrée(1.622*1731000˛*(2/r-1/a)) oů r représente la distance du satellite au centre de la lune, et a le demi grand axe de l'orbite elliptique. La vitesse orbitale du module de commande au point aů le module lunaire fait son DOI (62 milles nautiques) est égale ŕ: V=RacineCarrée(1,622*1731000˛/(1731000+114824))=1622,66 m/s L'orbite elliptique qui doit permettre d'aller de l'orbite du module de commande ŕ l'orbite plus basse de 15000m (50000 pieds) doit avoir un demi grand axe tel que: 2*a=2*1731000+114824+15000, donc a=1795912m. Le module lunaire part d'une distance r au centre de la lune telle que: r=1731000+114824=1845824m.. Donc, si nous calculons la vitesse orbitale sur l'orbite elliptique qui doit amener le module lunaire de l'orbite du module de commande ŕ l'orbite plus basse, la loi de Kepler dit qu'elle est égale ŕ: V=RacineCarrée(1,622*1731000˛*(2/1845824-1/1795912))=1599,95 m/s Cela fait une différence de 22,71m/s avec la vitesse orbitale du module de commande; exprimée en pieds/s, cela fait 75.7 pieds/s. Ils disent que le DOI fait perdre 75 pieds/s au module lunaire; cela semble coller avec ce que j'ai calculé. Et, si la réduction de vitesse devient 85 pieds/s, le module lunaire arrivera au niveau de la lune ŕ l'autre bout de l'ellipse! Cela veut dire que c'est loin d'ętre une maneuvre sűre, car une erreur sur la réduction initiale de vitesse pourrait avoir des conséquences catastrophiques ŕ l'autre bout de l'orbite elliptique. De plus, lorsque le module lunaire arrive sur l'orbite plus basse, s'il ne fait rien, il ne restera pas sur l'orbite, mais s'en éloignera ŕ la place; de sorte ŕ rester sur l'orbite plus basse, le module lunaire devra diminuer sa vitesse d'approximativement la męme valeur qu'il l'a fait initialement.  Maintenant, ils disent ceci dans la documentation: "Cette réduction est accomplie en utilisant 10% de la poussée maximale du réacteur sur 15 secondes, puis 40% de sa poussée maximale sur 13 secondes. Un sur-brűlage de 12 pieds par seconde (ou 3 secondes) permet de placer le module lunaire sur sa trajectoire avant la procédure d'alunissage". Donc, si nous appelons Am l'accélération maximale de la poussée du réacteur, nous avons plusieurs décréments successifs de vitesse venant des étapes suivantes: 1) 10% de Am est appliqué pendant 15 secondes en contre-sens de l'orbite, ce qui fait un décrément de vitesse égal ŕ: Am*0,1*15. 2) Puis 40% de Am est appliqué pendant 13 secondes, ce qui fait un décrément de vitesse égal ŕ: Am*0,4*13 3) puis une réduction finale de 12 pieds/s est encore appliquée. Donc, finalement, le décrément total de vitesse est égal ŕ: Am*1.5+Am*5.2+12=Am*6.7+12  Maintenant, avons-nous un moyen de connaître Am? Oui, nous l'avons, grâce aux spécifications du module lunaire: - Selon la NASA, le module lunaire avait une masse totale de 15200kg, pour les series H (celles des premičres missions). - le réacteur du module lunaire avait une force de 43900 Newtons, selon la NASA. Donc, le réacteur du module lunaire, avec réservoirs pleins et poussée maximale, pouvait donner une accélération de: Am=43900/15200=2,888 m/s˛=9,627 pieds/s˛ Donc, nous pouvons ŕ présent calculer le décrément (minimal) initial de vitesse causé par la poussée du réacteur: Décrément de vitesse=9,627*6.7+12=76,5 pieds/s Vous direz que cela ne fait pas beaucoup de différence avec la réduction de vitesse qui doit ętre appliquée, mais une variation de vitesse d'un pied par seconde cause une variation d'altitude de 1250 mčtres ŕ l'autre bout de l'orbite, et cette variation pourrait faire échouer la descente motorisée. La phase finale fait perdre 12 pieds/s au module linaire en 3 secondes; avec la poussée maximale, le module lunaire perdrait 12 pieds/s en: 12/9,627=1,246s. Cela signifie que, pour réduire la vitesse de 12 pieds/s en 3 seconces, le module luanire applique une fraction de la poussée égale ŕ 1,246/3=0,41, soit 41%. Maintenant, pourquoi est-ce que la maničre dont la vitesse du module lunaire est décrue n'a pas de sens? Parce qu'elle commence avec une poussée modérée (10% de poussée) et finit avec une poussée plus importante (40% de poussée); cela aurait dű ętre l'inverse, le module lunaire aurait du commencer ŕ utiliser une poussée importante, et plus modérée ŕ la fin, De maničre ŕ pouvoir ajuster la perte de vitesse de maničre aussi précise que possible. En effet, une simple variation d'un pied/s au début de l'orbite de transfert génčre une variation d'altitude de 1250 mčtre ŕ l'autre bout de l'orbite de transfert! Les choses ont donc été faites en ordre inverse!  Ils décrivent ensuite les phases opérationnelles de l'alunissage, en commençant par la phase qui permet au module lunaire de perdre l'essentiel de la vélocité horizontale. Le module lunaire a en effet une velocité horizontale trčs importante relativement ŕ la lune de presque 6000km/h qu'il doit absolument perdre avant l'alunissage. Imaginez ce qui se passerait s'il alunissait avec une telle vélocité: Il serait littéralement pulvérisé!  Durant la phase initiale, le LEM est orienté horizontalement, car il doit utiliser la poussée de son réacteur pour contrer la vélocité horizontale et la faire décroître. Initialement, la force centrifuge permet de contrer l'attraction lunaire, ce qui signifie que cette derničre n'a pas besoin d'ętre contrée. Progressivement, au fur et ŕ mesure que le module lunaire perd sa vélocité horizontale, la force centrifuge décroît, ce qui signifie que l'attraction lunaire tend ŕ de plus en plus attirer le module vers la lune et ŕ faire augmenter sa vélocité verticale. Mais, pendant la phase initiale de ralentissement, la vélocité verticale reste relativement faible relativement ŕ l'importante vélocité horizontale, et représente seulement ŕ peu prčs un centičme de cette derničre. Donc, pendant cette phase, le module lunaire ignore l'attraction lunaire, et consacre la poussée de son réacteur essentiellement ŕ décroître l'importante vélocité horizontale, ce qui signifie qu'il reste horizontal. Aprčs cette phase, il commence ŕ tourner vertical de maničre ŕ commencer de contrer l'attraction lunaire avant qu'elle ne devienne trop importante, modérément d'abord, puis de plus en plus comme la vélocité horizontale devient de plus en plus faible, pour finir complétement vertical ŕ la fin.  Voici le tableau récapitulatif de la descente contrôlée. Une colonne (TFI) indique le temps, une colonne (inertial velocity) indique la vélocité horizontale relativement ŕ la lune, une colonne indique le taux d'altitude, une colonne indique l'altitude courante, et une colonne indique le DeltaV (le triangle est un symbole grec qui signifie "Delta").. Mais comment est obtenue la deuxičme colonne, celle de la vélocité réelle?  Avec le radar, bien sűr, en utilisant leffet Doppler (cet effet est utilisé par les radars de police pour mesurer la vitesse de votre voiture). Bien sűr!  Mais attendez...  Dans le document de la NASA, ils disent explicitement que la vélocité ne pouvait ętre acquise qu'ŕ partir d'une altitude de 22000 pieds. Cela signifie que le radar ne pouvait acquérir que les vélocités colorées en vert; les vélocités que j'ai colorées en rouge ne pouvaient ętre acquises par le radar, car correspondant ŕ une altitude au dessus la la limite d'acquisition du radar (22000 pieds).  Et, concernant l'altitude, ils disent qu'elle ne pouvait ętre acquise par le radar qu'ŕ partir de l'altitude de 39000 pieds. Cela signifie que le radar ne pouvait acquérir que les altitudes colorées en vert, et non celles colorées en rouge.  Alors, qu'est ce qui permettait d'acquérir les vélocités et altitudes que j'ai colorées en rouge dans la table, si le radar ne pouvait les acquérir? Oui, quoi??? En fait, il était possible d'acquérir la position et la vitesse du module lunaire en utilisant la plateforme inertielle, i.e. des gyroscopes et accéléromčtres, mais l'accéléroimčtre a une petitte erreur qui est intégrée pour obtenir la vitesse; et; pour obtenir la position, la vitesse est intégrée, et c'est aussi le cas pour l'erreur sur la vitesse. Cela signifie que les indications de vitesse et position données par la plateforme inertielle sont bien moins précises que celles données par les radars. Et, d'ailleurs, le radar ne donne pas son indication ŕ partir d'une altitude donnée, il la donne dčs qu'il y a un écho qui revient.  Je pense que le pčre Noël a la réponse. 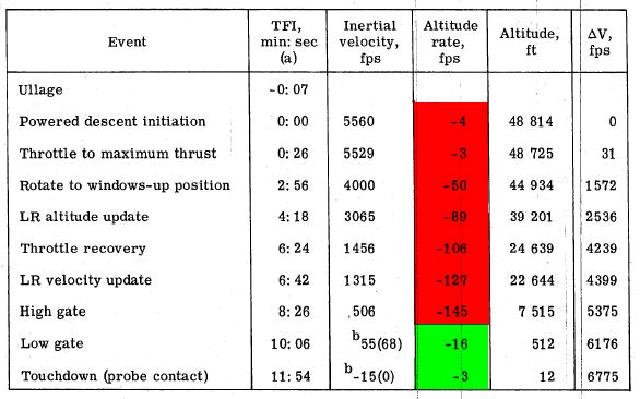 Vous remarquerez que le taux d'altitude augmente constamment jusqu ŕ la phase "high gate", car le LEM de fait pas d'effort pour contrer la vélocité verticale, ou pas suffisant.  Entre les événements que j'ai colorés en bleu (Rotate to Windows-up position) et vert (LR altitude update), il y a une différence de temps égale ŕ 4:18-2:56=82 secondes; au premier de ces deux événements (Rotate to Windows-up position), le taux d'altitude indiqué est -50; au second de ces deux événements ((LR altitude update), le taux d'altitude indiqué est -89; cela signifie que le taux d'altitude est compris entre -50 et -89 entre ces deux événements; la perte minimale d'altitude est donc égale ŕ 82*50=4100 pieds, et la perte maximale d'altitude est égale ŕ 82*89=7298 pieds; la différence d'altitude entre ces deux événements est égale ŕ 44934-39201=5733 pieds; 5733 est compris entre le minimum (4100) et le maximum (7298) que nous avons calculés ŕ partir du taux d'altitude, et nous avons donc une cohérence.  Maintenant plus embarrassant. Entre les événements que j'ai colorés en bleu (LR altitude update) et vert (Throttle recovery), il y a une différence de temps égale ŕ 6:24-4:18=126 secondes; au premier de ces deux événements, le taux d'altitude indiqué est -89; au second de ces deux événements, le taux d'altitude indiqué est -106; cela signifie que le taux d'altitude est compris entre -89 et -106 entre ces deux événements; la perte minimale d'altitude est donc égale ŕ 89*126=11214 pieds, et la perte maximale d'altitude est égale ŕ 106*126=13356 pieds; maintenant la différence d'altitude entre ces deux événements est égale ŕ 39201-24639=14562 pieds, donc plus grande que la perte maximale d'altitude (13356 pieds) donnée par le taux d'altitude!. Et, en fait, la perte moyenne d'altitude donnée par le taux d'altitude est proche de la demie-somme du minimum et du maximum de la perte d'altitude donnés par le taux d'altitude, soit 12285 pieds, encore plus éloignée de la différence effective d'altitude (14562 pieds). Et nous avons donc ici une incohérence nette! 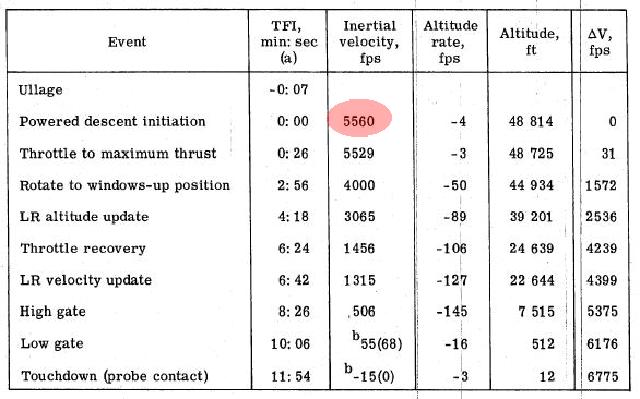 La table indique que la vélocité horizontale initiale du module lunaire est égale ŕ 5560 pieds/s. Comem la vélocité verticale intiale de la table indiquée par la table est nulle, elle représente une vélocité orbitale. J'ai calculé la vitesse orbitale ŕ cette altitude en mčtres par seconde (~1668m/s). Je me suis demandé quel facteur de conversion les ingénieurs de la NASA utilisaient pour convertir un pied. Un pied est habituellement considéré comme étant long de 30 cm; toutefois, un article sur Google dit qu'il est trčs précisément égal ŕ 30,48 centimčtres. Toutefois, si j'applique un facteur de conversion de 0,3048, je trouve une vélocité orbitale un peu plus petite que celle indiquée dans la table, 5473 pieds/s, alors que, si j'utilise un facteur de conversion de 0,3, je trouve précisément la vitesse orbitale de 5560 pieds/s indiquée dans la table; de ceci j'en déduis que les ingénieurs de la NASA considérait qu'un pied était exactement égal ŕ 30 centimčtres, et non 30,48 centimčtres. Cela nous permet également de savoir que les vélocités indiquées dans cette colonne sont absolues, et non relatives ŕ la surface lunaire, car, si la vélocité orbitale était relative ŕ la surface lunaire, 15 pieds par secondes devraient ętre ajoutés ŕ cette vélocité, et elle serait alors de 5575 pieds/s.  Maintenant, la derničre vélocité de la table, alors que le module lunaires est ŕ 12 pieds de la surface lunaire (moins de 3 mčtres) est indiquée comme -15 pieds/s. Si cette vélocité était absolue, comme les vélocités précédentes de la colonne le sont, cela signifie qu'elle représenterait une vélocité de 15 m/s ŕ contre-sens de l'orbite du module de commande; comme le module de commande orbite ŕ contre-sens de la rotation de la lune, cela signifie que le module lunaire tournerait dans le męme sens que la rotation de la lune, et aussi ŕ la męme vitesse, cat la lune tourne sur elle-męme ŕ une vitesse de 15 pieds/s.  Cela signifie donc que, si la derničre vélocité de la table est absolue, le module lunaire tourne comme la rotation de la lune, et est donc stationnaire relativement ŕ la surface lunaire, ce qui signifie que le module lunaire pourrait alunir en toute sécurité.  Mais, et c'est le truc, l'auteur du document a ajouté une indication sur cette vitesse qui signifie qu'elle n'est pas absolue, mais relative ŕ la surface lunaire (la vitesse absolue est entre parentčses).  Cela signifie que la surface lunaire se déplace ŕ une vitesse de 15 pieds/s relativement au module lunaire ŕ cause de la rotation sur elle-męme de 15 pieds/s, ce qui signifie que le module lunaire a une vitesse absolue nulle; si la lune ne tournait pas sur elle-męme, le module lunaire serait stationnaire relativement ŕ la surface lunaire, mais, ŕ cause de cette rotation, la surface lunaire bouge relativement au module lunaire, ce qui revient au męme que de dire que le module lunaire bouge relativement ŕ la surface lunaire (comme un avion sur terre qui va ŕ la męme vitesse que la rotation de la terre, et ŕ contre-sens de celle-ci; relativement au soleil, cet avion a une vitesse absolue qui est nulle, avec le résultat que le temps ne change pas ŕ bord de cet avion; mais, relativement ŕ nous sur terre, vous voyons cet avion voler rapidement). Donc, parce qu'ils spécifient que la derničre vélocité (en męme temps que celle qui précéde) est relative ŕ la surface lunaire, et non absolue, cela signifie que le module lunaire bouge réellement ŕ une vitesse de 15 pieds/s (~16 km/h) relativement ŕ la surface lunaire.  Mais le LEM ne peut pas alunir avec une vélocité latérale, il doit ętre parfaitement stationnaire relativement ŕ la lune lorsqu'il alunit. Alunir avec une vélocité latérale de 15 pieds par seconde serait un parfait passeport pour culbuter au moment de toucher le sol. Vous pourriez maintenant penser qu'il a encore le temps d'annuler vette vitesse latérale avant d'alunir? Lorsque le module lunaire a cette vitesse latérale, il est ŕ une distance de 12 pieds du sol et descend ŕ une vitesse de 3 pieds par seconde; cela signifie qu'il ne lui reste que 4 secondes avant de toucher le sol; comme il se déplace latéralement ŕ une vitesse de 4,6m/s (correspondance de 15pieds/s), cela signifie qu'il doit produire une décélération de 1,15m/s˛. Le puissant moteur central est lui-męme capable de produire une décélération maximale de 3m/s˛ a pleine poussée. Les réacteurs latéraux sont beaucoup moins puissants que le moteur central, et ne sont pas capables de produire cette décélération de 1,15m/s˛, ce qui signifie qu'ils ne seront pas capables d'annuler la vitesse latérale du module lunaire avant qu'il ne touche le sol. Qu'est ce que représente exactement le DeltaV, qui est affiché sur la derničre colonne de la table? Le DeltaV est une combinaison d'un DeltaV horizontal, que j'appelerai DeltaVH, et un DeltaV vertical, que j'appelerai DeltaVV. Le DeltaV horizontal est la différence entre la vitesse horizontale que le module lunaire aurait si elle n'avait pas été contrée par le réacteur et la vitesse horizontale courante. De męme, le DeltaV vertical est la différence entre la vitesse verticale que le module lunaire aurait si elle n'avait pas été contrée par le réacteur et la vitesse verticale courante. Une fois les DeltaV horizontal et vertical sont connus, le DeltaV est simplement calculé en sommant les carrés des deux DeltaV, et en prenant ensuite la racine carrée de cette somme: DeltaV=RacineCarrée(DeltaVH˛+DeltaVV˛). Puisque la vélocité horizontale que le module lunaire aurait, si elle n'avait pas été contrée, est la vélocité orbitale initiale, le DeltaV horizontal est calculé comme: DeltaVH=Vélocité orbitale initiale- vélocité horizontale courante. La vitesse acquise par l'attraction lunaire peut ętre calculée par la formule: V=1.622*t, t étant le temps écoulé depuis le début de la procédure d'alunissage; ceci donne la vitesse verticale venant de l'attraction lunaire exprimée en m/s, donc, elle doit ętre divisée par 0,3 pour l'obtenir en pieds/s. Nous avons donc maintenant: DeltaVV=1.622*t/0.3-Vitesse verticale courante. Et, avec la connaissance des deux DeltaV sur les deux axes, nous pouvons calculer le DeltaV par la formule ci-cessus. 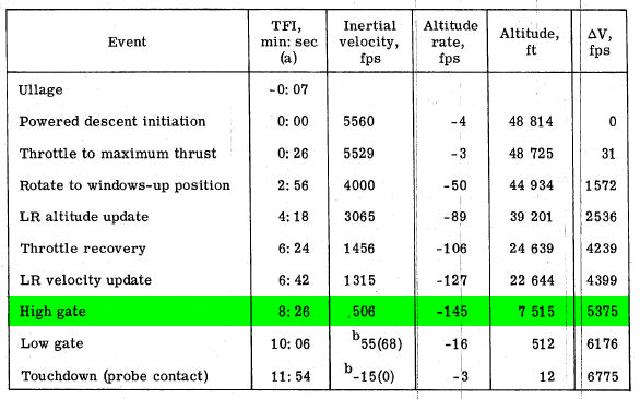 Prenons ŕ présent l'événement "High Gate": - La vitesse horizontale courante est 506 pieds/s, donc le DeltaV horizontal est égal ŕ: DeltaVH=5560-506=5054 pieds/s. - Le temps courant indiqué est 8:26=506 s, et la vitesse verticale courante(Altitute rate) est de 145 pieds/s; le DeltaV verticale est donc égal ŕ: DeltaVV=1,622*506/0.3-145=2590 pieds/s. Nous pouvons maintenant calculer le DeltaV: DeltaV=RacineCarréet(DeltaVH˛+DeltaVV)=RacineCarrée(5054˛+2590˛)=5679 pieds/s. Mais le DeltaV courant est indiqué comme 5375 pieds/s seulement; cela fait une différence de plus de 300 pieds/s.  Prenons ŕ présent l'événement "Low Gate": - La vitesse horizontale courante est 68 pieds/s (le nombre entre parenthčses, l'autre est relative ŕ la surface lunaire), donc le DeltaV horizontal est égal ŕ: DeltaVH=5560-68=5492 pieds/s. - Le temps courant indiqué est 10:26=626 s, et la vitesse verticale courante(Altitute rate) est de 16 pieds/s; le DeltaV verticale est donc égal ŕ: DeltaVV=1,622*626/0.3-16=3368 pieds/s. Nous pouvons maintenant calculer le DeltaV: DeltaV=RacineCarréet(DeltaVH˛+DeltaVV)=RacineCarrée(5492˛+3368˛)=6442 pieds/s. Mais le DeltaV courant est indiqué comme 6176 pieds/s seulement; cela fait une différence de plus de 266 pieds/s; c'est moins que pour la différence précédente, mais encore relativement important.  Prenons ŕ présent l'événement "TouchDown": - La vitesse horizontale courante est 0 pieds/s (le nombre entre parenthčses), donc le DeltaV horizontal est égal ŕ: DeltaVH=5560 pieds/s. - Le temps courant indiqué est 11:54=714 s, et la vitesse verticale courante(Altitute rate) est de 3 pieds/s; le DeltaV vertical est donc égal ŕ: DeltaVV=1,622*714/0.3-3=3857 pieds/s. Nous pouvons maintenant calculer le DeltaV: DeltaV=RacineCarréet(DeltaVH˛+DeltaVV)=RacineCarrée(5560˛+3857˛)=6766 pieds/s. Mais, cette fois, le DeltaV indiqué est trčs proche du DeltaV théorique, et męme légčrement supérieur, au lieu d'ętre nettement plus petit comme dans les événements précédents (plus de de 200 pieds/s de différence), car il est égal ŕ 6775 pieds/s. Alors, qu'est ce qui s'est produit, comment se fait-il que le DeltaV final puisse ętre si proche du DeltaV théorique final alors que les valeurs précédentes du DeltaV étaient nettement plus faibles que le DeltaV théorique??? En fait, la réponse se trouve dans le document, ils disent ceci: "De plus, 85 pieds/s sont ajoutés de maničre ŕ assurer 2 miutes de vol dans la phase d'alunissage" "Egalement, 60 pieds/s sont ajoutés pourt l'opération PD dans l'approche pour éviter de large cratčres ((1000 ŕ 2000 mčtres de diamčtre) dans la zone d'alunissage." Cela veut dire qu'ils ajoutent artificiellement 145 pieds/s au DeltaV calculé pour des raisons fantaisistes. S'ils n'avaient pas artificiellement accru le DeltaV, le DeltaV final calculé par le guidage aurait été nettement plus petit que le DeltaV théorique, comme pour les événements précédents.  Maintenant, s'ils rajoutent du DeltaV ŕ chaque fois qu'ils tombent en dessous d'une altitude donnée, ce DeltaV va faire remonter le module lunaire ŕ nouveau, et, lorsque le module lunaire retombe, une nouveau DeltaV est rajouté ŕ nouveau, qui fait remonter le module lunaire ŕ nouveau, et ainsi de suite... De cette maničre, j'ai bien peur que le module lunaire n'arrive jamais ŕ alunir!  Maintenant, la maničre normale pour l'AGC de procéder est de calculer, pas ŕ pas, la poussée courante ŕ partir des indications données par les radars (altitude et relief lunaire); et les accéléromčtres; ceci est un processus continu. Le guidage ne doit certainement pas ajouter un DeltaV fictif en prévision de cratčres qu'il n'est męme pas sűr de rencontrer! Maintenant, je pense que les ingénieurs de la NASA ont négligé la décélération venant de la force centrifuge, et je ne pense pas qu'ils l'ont prévu comme une erreur intentionnelle; je pense qu'ils ne l'ont juste pas pris en compte; je le pense parce que, si elle n'est pas prise en compte, le DeltaV final indiqué colle avec le DeltaV théorique, mais c'est seulement pace qu'ils l'ont artificiellement accru, et c'est le gag qu'ils ont imaginé. Mais, comment prendre en compte la décélération venant de la force centrifuge? N'est-ce pas un peu compliqué de l'intégrer dans le calcul de la vitesse verticale. En fait, pas tant que cela, si la vitesse verticale venant de l'attraction lunaire est calculée différemment; si cette vitesse est calculée, non depuis le temps courant, mais depuis la perte courante d'altitude, alors le résultat qui est obtenu est plus petit que le résultat obtenu en utilisant le temps courant, mais ce résultat prend en compte la décélération venant de la force centrifuge, et elle dont plus adéquate. Un objet tombant en chute libre sur la lune depuis une hauteur H atteint le sol lunaire dans un temps T tel que: 1.622*T˛/2=H. (H exprimé en mčtres). Le temps que prend cet objet pour atteindre le sol est: T=RacineCarrée(2*H/1,622). Durant ce temps, cet objet acquiert une vitesse égale ŕ: V=1,622*T=1,622*RacineCarrée(2*H/1,622) Le résultat est en m/s (H étant exprimé en mčtres). Si l'unité est le pied au lieu du mčtre, la vitesse obtenue par un objet en chute libre sur la lune aprčs ętre tombé d'une hauteur H est: V=1,622*RacineCarrée(2*H*0,3/1,622)/0,3 Le résultat obtenu est plus petit que le résultat obtenu ŕ partir du temps courant de la procédure d'alunissage, mais, au contraire du calcul précédent, il prend en compte la décélération venant de la force centrifuge, et est dont plus adéquat pour calculer le DeltaV. Maintenant, si nous recalculons le DeltaV final, nous avons: DeltaVV=1,622*RacineCarrée(2*(48814-12)*0,3/1,622)/0,3-3=723 pieds/s. Le DeltaV final devient donc: DeltaV=RacineCarrée(5560˛+723˛)=5606 pieds/s. Cela signifie que le DeltaV théorique qui prend en compte la décélération venant de la force centrifuge est nettement plus petit que le DeltaV appliqué (6775 pieds/s), plus petit de plus d'un millier de pieds/s!  Il semble donc que le guidage n'était pas trčs doué pour faire une évaluation correcte du DeltaV. Mais il semble que l'ordinateur d'Apollo était plus occupé ŕ afficher des alarmes qu'ŕ faire correctement son travail. Alors, comment est-ce que le module lunaire pouvait alunir avec un guidage déficient?  Je pense qu'il y a la main de Dieu dans ceci! |
 De maničre ŕ alunir, le module lunaire décroît un peu sa vitesse orbitale (d'ŕ peu prčs 75 pieds par seconde) pour prendre une orbite de transfert qui permet d'amener le module lunaire sur une orbite inférieure. Selon le rapport de mission d'Apollo 17, le module lunaire d'Apollo 17 atteindrait l'orbite inférieure, sur le péricynthion de l'orbite de transfert, ŕ une altitude de 6,2 milles. J'ai d'abord pensé que le module lunaire a commencé sa descente motorisée aussitôt qu'il a atteint l'orbite inférieure, ce qui signifie qu'il commencerait alors sa descente motorisée ŕ une altitude de 6,2 milles nautiques, ce qui correspond ŕ 38274 pieds. 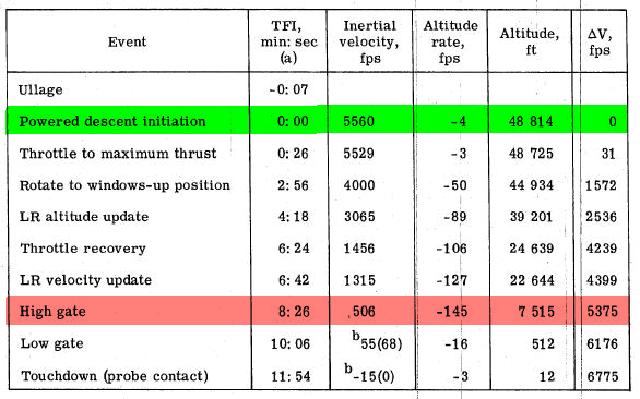 Mais, selon la table de descente motorisée d'Apollo 11, cette altitude ne représenterait męme pas la phase de ralentissement de la descente motorisée d'Apollo 11. La phase de ralentissement est la phase durant laquelle le module lunaire réduit son importante vitesse orbitale, sans se soucier de sa vitesse verticale qui reste faible durant cette phase. L'altitude perdue dans la phase de ralentissement est la différence entre l'altitude au début de la descente motorisée et l'altitude de l'événement "High Gate" qui termine la phase de ralentissement, et cette différence est égale ŕ 41299 pieds. Donc, si le module lunaire d'Apollo 17 commençait sa descente motorisée ŕ une altitude de 38274 pieds, il ne pourrait męme pas terminer la phase de ralentissement.  Il s'écraserait sur le sol lunaire un peu avant la fin de la phase de ralentissement, avec des vitesses horizontale et verticale toutes deux importantes. Et il n'y a pas de possibilité que le module lunaire puisse raccourcir cette phase de ralentissement, car il est un peu plus lourd que le module d'Apollo 11, mais a le męme moteur, ce qui signifie qu'il a plus de difficulté ŕ réduire sa vitesse horizontale que le module d'Apollo 11.  La conclusion est que, si le module lunaire commençait sa descente motorisée aussitôt qu'il atteint l'orbite inférieure, ŕ une altitude de 6,2 milles, il serait sűr de s'écraser sur la lune.  Mais la table des paramčtres de trajectoire (3-III) du męme rapport indique que le module lunaire débuta en fait sa descente motorisée ŕ une latitude de 8,7 milles et non 6,2 milles. 8.7 milles est équivalent ŕ 53708 pieds, et est donc plus haut que les 48814 pieds de la descente motorisée d'Apollo 11. C'est apparemment suffisan pour faire la descente motorisée (contrairement aux 6,2 milles).  La table des paramčtres de trajectoire nous informe sur les coordonnées lunaires du point oů le DOI fut fait (passage sur l'orbite de transfert). Il y a des coordonnées pour le début et la fin du DOI.  La fin du DOI correspond au moment oů le LEM est sur l'apocynthion de l'orbite de transfert, et donc les coordonnées de l'apocynthion sont celles de la fin du DOI, soit 19,2° Latitude Sud, et 166,77° Longitude Ouest.  Le péricynthion de l'orbite de transfert, qui est le point oů le module lunaire atteint l'orbite inférieure, est diamétralement opposé ŕ l'apocynthion, et des coordonnées lunaires sont symétriques ŕ celles de l'apocynthion; la latitude du péricynthion est la męme que pour l'apocynthion, mais relative au pôle opposé (i.e. le nord devient le sud, et vice versa); en ce qui concerne la longitude, la longitude du péricynthion est le complément ŕ 180° de la longitude de l'apocynthion, et relative ŕ la direction opposée (i.e. l'ouest devient l'est, et vice versa). Par exemple, si les coordonnées lunaires de l'apocynthion sont n° Latitude Sud et m° Longitude Ouest, les coordonnées lunaires du péricynthion sont n° Latitude Nord and 180-m° Longitude Est.  Donc, la latitude 19.12° Sud de l'apocynthion de l'orbire de tranfert devient 19,12° Nord au péricynthion de cette orbite.  Et la longitude 166,77° Ouest de l'Apocynthion devient 180-166,77=13,23° Est au péricynthion de cette orbite.  Donc, par la connaissance des coordonnées de l'apocynthion (19,2° Sud, 166,77° Ouest), nous connaissons les coordonnées du péricyntion de l'orbite de transfert (19,2° Nord, 13,23° Est). Les paramčtres de trajectoire nous informent aussi sur les coordonnées lunaires du point oů le module lunaire a commencé sa descente motorisée; elles sont 19,13° Latitude Nord et 48,75° Longitude Est. Donc le point oů le module lunaire a atteint l'orbite inférieure, et le point oů il a commencé sa descente motorisée, ont des longitudes trčs différentes (13,23° Est et 48,75° Est), mais la męme latitude ou presque (seulement 0,01° de différence). Le module lunaire a commencé sa descente motorisée avec une différence de longitude de 35° avant qu'il n'atteigne le péricynthion.  J'ai d'abord pensé qu'il était impossible que le péricynthion et le PDI puissent avoir la męme latitude. Toutefois, j'ai raisonné comme si seul l'axe apocynthion-péricynthion faisait un angle avec le plan horizontal de la lune, et que l'axe perpendiculaire était dans le plan horizontal de la lune.  Le problčme est que l'axe perpendiculaire peut également faire un angle avec le plan horizontal de la lune, rien ne garantit qu'il est dans le plan horizontal de la lune. J'ai vérifié dans le rapport de mission d'Apollo 17 s'il était possible de confirmer que le petit axe de l'orbite de transfert était dans le plan horizontal de la lune, mais je n'ai malheureusement rien trouvé qui puisse le confirmer. J'avais espéré trouver une phrase comme: "Aprčs avoir tourné d'un quart de tour autour de la lune, nous avons pu voir l'équateur de la lune", mais malheureusement, je n'ai rien trouvé qui puisse me permettre de prouver que le fait que le péricynthion et le PDI avaient la męme latitude était anormal. Je pourrais toujours dire que ce serait vraiment une coďncidence si le PDI et le péricynthion avaient la męme latitude, mais les fans d'Apollo me rétorqueront, et avec raison, que je dois prouver que cette coďncidence ne peut arriver, et je dois avouer que je ne le peux. Alors je suis resté perplexe. Manifestement les ingénieurs ont voulu signifier quelque chose avec les latitudes identiques du PDI et du péricynthion, mais en męme temps ils ne m'ont pas donné la possibilité de prouver formellement que c'était une anomalie. Qu'est-ce que cela signifie?  Et finalement la lumičre vint. Et si, au lieu d'ętre prévu comme une anomalie, l'identité de latitude du PDI et du péricynthion donnait un indice permettant de prouver une autre anomalie.  En effet, que signifie le fait que le PDI et le péricynthion avaient la męme latitude? Cela signifie que la différence de longitude entre les deux représente également l'angle entre le PDI et le péricynthion (l'angle représenté en vert) relativement au centre de la lune dans le systčme de référence de l'orbite de transfert, Ce qui n'aurait pas été le cas s'ils avaient eu des latitudes différentes: Si j'appelle "Angle" cette différence de longitude (égale ŕ 35,52°), et xc et yc les coordonnées du PDI dans le systčme de référence de l'orbite de transfert relativement au centre de la lune, nous avons la relation: yc/xc=tan(Angle). Si j'appelle x et y les coordonnées du PDI relativement au centre de l'ellipse, a le demi-grand axe de l'ellipse, b son demi-petit axe, et c la distance entre le centre de l'ellipse et l'un de ses foyers, donc la distance entre le centre de l'ellipse et le centre de la lune, puisque le centre de la lune est l'un de ses foyers, nous avons la relation bien connue: x˛/a˛+y˛/b˛=1. Mais nous avons aussi: x=xc+c, et y=yc. Donc, si nous utilisons les coordonnées du PDI relativement au centre de la lune, nous obtenons: (xc+c)˛/a˛+yc˛/b˛=1. Mais nous avons également: xc=yc/tan(angle), ce qui permet de remplacer xc dans la formule qui devient: (yc/tan(angle)+c)˛/a˛+yc˛/b˛=1. Et qu'obtenons nous finalement? Une équation du second degré en yc, et je suppose que la plupart d'entre vous savent comment résoudre une telle équation. Bien sűr, nous avons besoin de commaître les paramčtres a, b and c de l'ellipse, mais ils sont aisés ŕ obtenir. Nous avons d'abord: 2*a=2*rayon lune+altitude Apocynthion+altitude péricynthion. Selon le rapport de mission d'Apollo 17, l'altitude de l'apocynthion était de 59,6 milles nautiques, ce qui donne 110379 mčtres, et l'altitude du péricynthion était de 6,2 milles, ce qui donne 11482 mčtres, et le rayon de la lune est de 1731km. Cela donne finalement: a=1791930 mčtres. c peut ętre obtenu avec: c=a-rayon lune-altitude du péricynthion, ce qui donne c=49448 mčtres. Et, comme nous avons la relation: a˛-b˛=c˛, nous pouvons calculer b avec la formule:b=Racine carrée(a˛-c˛), ce qui donne b=1791247 mčtres. Nous avons maintenant tout ce dont nous avons besoin pour calculer les coefficients de l'équation du second degré, et la résolution de cette équation donne: yc=1017443 mčtres. Nous obtenons xc avec: xc=yc/tan(angle), ce qui donne xc=1425351 mčtres avec l'angle de 35.52°. Et, connaissant xc, et yc, nous pouvons calculer la distance du PDI au centre de la lune avec la formule: Distance=Racine carrée(xc˛+yc˛); aprčs avoir soustrait le rayon de la lune de cette distance, nous obtenons finalement l'altitude du PDI: Altitude du PDI=20233 mčtres; converti en milles nautiques, cela donne 10,92 milles nautiques. Mais, dans les paramčtres de trajectoire de la mission, ils nous disent que l'altitude du PDI était de 8,7 milles. 8,7 milles au lieu de 10,92 milles, ce la fait plus de 2 milles de différence (2,22), plus de 4 km!  Nous avons maintenant notre anomalie, et elle a pu ętre prouvée grâce au fait que le PDI et le péricynthion de l'orbite de transfert avaient la męme latitude! Donc, si le fait que le PDI et le péricynthion avaient la męme latitude n'est pas une anomalie prouvée, cela permet de prouver une réelle anomalie d'un autre côté.  Maintenant, les fans d'Apollo ont encore un espoir; c'est un fait connu que le centre de masse de la lune est un peu différent de son centre géomčtrique; il y aurait une distance de plusieurs kilomčtres entre les deux; cette distance est généralement considérée égale ŕ 2 kilomčtres, mais cela peut ętre un peu plus. Le centre de masse est plus proche de la terre que le centre géomčtrique, donc plus proche du péricynthion de l'orbite de transfert. Cela signifie que la distance entre le centre de l'ellipse et l'un de ses foyers est augmentée de la distance entre les deux centres, puisque le centre de masse est le vrai foyer de l'ellipse; la conséquence est que le demi petit axe de l'ellipse est un peu plus petit (puisque nous avons la relation: b˛=a˛-c˛), et l'orbite de transfert un peu plus plate; ceci va bien sűr diminuer un peu l'altitude du PDI.  Ce que j'ai dit ouvre une fenętre d'espoir pour les fans d'Apollo. Est-ce que l'altitude du PDI va ętre assez réduite pour s'accorder avec l'altitude indiquée sur les paramčtres de trajectoire? Je vais me montrer généreux; la distance généralement acceptée entre les deux centres est de deux kilomčtres, mais, si je prends cette distance, les fans d'Apollo me diront: Vous n'ętes pas sűr que c'est la distance exacte, cela pourrait ętre un peu plus. C'est pourquoi je vais prendre nettement plus; je vais prendre 10 kilomčtres pour cette distance, cinq fois plus que la distance acceptée. De cette maničre, je suis sűr que la distance que je prends ne sera pas pas plus petite que la distance réelle entre les deux centres. Et maintenant refaisons tous les calculs ŕ nouveau, en prenant en compte cette fois la distance (exagérée) entre les deux centres de la lune. La distance entre le centre de l'ellipse et son foyer devient: Distance entre le centre de l'ellipse et le centre géomčtrique + distance (exagérée) entre les centres=59448 mčtres. Si j'appelle c' la distance entre le centre de l'ellipse et le centre de masse, nous avons la relation: b˛=a˛-c'˛, ce qui donne b=1790944 mčtres. Aprčs avoir recalculé les coefficients de l'équation du second degré, et l'avoir résolue, nous trouvons: yc=1017386 mčtres. Ceci nous permet de calculer la nouvelle valeur de xc: xc=1425271 mčtres. Aprčs avoir calculé la distance au centre (géomčtrique) de la lune, et soustrait le rayon de la lune, nous obtenons finalement la nouvelle altitude du PDI: 20135 mčtres; en milles, cela donne 10,87 milles nautiques. Donc, en prenant en compte la distance entre les deux centres de la lune, et en l'exagérant nettement, nous avons gagné seulement 0,05 milles, pas męme un dixičme de mille, alors que nous avions besoin de gagner 2,22 milles pour effacer l'anomalie.  Nous pouvons appeler cela la mort d'un espoir déçu! Cette vidéo, dans laquelle nous voyons le module lunaire passer soudainement d'une attitude horizontale ŕ une attitude verticale juste avant l'alunissage, n'a absolument pas de sens; car, lorsque le module est proche de la surface lunaire, il a une vitesse horizontale faible, et a perdu la force centrifugre qui lui permettait de contrer l'attraction lunaire, et il ne bénéficie pas de la force de l'air pour le soutenir en l'air, comme pour un avion ou un hélicoptčre sur terre, ce qui signifie qu'il ne peut la contrer qu'avec son moteur principal, et il doit absolument avoir une attitude verticale pour que le moteur principal puisse contrer cette attraction; ses réacteurs latéraux permettent de faire des maneuvres de rotation et de translation, mais ils ne sont pas assez puissants pour contrer l'attraction lunaire (et, de plus, leur poussée n'est pas réglable). Si le module lunaire volait avec une attitude horizontale, il ne pourrait contrer l'attraction lunaire, serait attiré par la lune, et s'écraserait dessus. Et, męme si LEMes réacteurs latéraux avaient été assez puissants pour contrer l'attraction lunaire (et que leur poussée avait été réglable pour contrer exactement l'attraction lunaire), le module lunaire ne serait pas parvenu ŕ rester parfaitement stable comme ce que nous voyons sur la vidéo lorsqu'il est tourné d'une attitude horizontale vers une attitude verticale. Cette vidéo n'a donc pas le moindre sens, elle est physiquement impossible. |
|
Sur le chemin retour vers le module de commande, le LEM se débarrasse de son étage de descente dont il n'a plus besoin; ceci lui permet d'ętre plus léger et plus facile ŕ manoeuvrer, et aussi de consommer moins de carburant.  Le LEM suit également une trajectoire parabolique comme sur le voyage aller, mais inversée: En effet, au lieu de perdre de la vitesse horizontale, il doit au contraire en gagner, de maničre ŕ ce que, lorsqu'il arrive sur l'orbite du module de commande, il ait la męme vitesse horizontale que ce dernier. Comme le LEM a une vitesse horizontale qui est inférieure ŕ celle du module de commande, sauf lorsqu'il arrive sur son orbite, le LEM doit décoller avant que le module de commande soit au dessus de celui-ci, de maničre ŕ ętre juste avant ce dernier lorsqu'il arrive sur son orbite. Notez que cette fois le LEM arrivera avec une orientation qui est l'opposée de celle qu'il avait lorsqu'il a quitté le module de commande pour la lune. Le problčme est que le LEM ne peut communiquer avec le module de commande que par son sommet; sur sa partie inférieure, il y a le réacteur, et pas de communication possible de ce côté; cela veut dire que, cette fois, lorsque le LEM arrive sur l'orbite du module de commande, il doit tourner d'un demi-tour, ce maničre ŕ présenter son sommet a celui-ci, avant de se joindre au module de commande.  Si le LEM arrive derričre le module de commande au lieu d'arriver devant, il sera alors incapable de s'arrimer au module de commande. Conséquemment le rendez-vous direct requiert un excellent contrôle. Les ingénieurs ont pensé que la technologie qu'ils utilisaient n'était pas capable de garantir ce niveau de contrôle. Ceci est la maničre dont ils l'expliquent: "La solution la plus évidente, de monter directement depuis la surface lunaire avec une poussée unique, et rencontrer le véhicule passif peu aprčs le lancement, peut ętre rapidement rejetée pour plusieurs raisons. Avant tout, une telle montée requiert que le lancement se fasse précisément au temps spécifié, et le réacteur, le radar, et les systčmes de guidage doivent fonctionner absolument parfaitement (une fantaisie aux yeux de tout ingénieur!). Qu'il y ait le moindre écart avec une telle exactitude, et le véhicule montant loupera sa cible. Męme dans des conditions idéales, la phase terminale primordiale (l'approche, le ralentissement, et l'arrimage) se passerait trčs rapidement, et il n'y aurait pas de contrôle possible sur les conditions d'éclairage ce qui veut dire que cela pourrait se passer dans l'obscurité complčte. Une difficulté finale était le manque de solutions aisées pour la récupération d'erreurs de trajectoire ou de pannes du systčme durant la montée." Le rendez-vous direct a donc été rejeté non parce qu'il était théoriquement impossible mais ŕ cause du haut niveau de contrôle qu'il requiert.  C'est pourquoi, au rendez-vous direct, ils ont préféré une approche plus graduelle impliquant plusieurs orbites autour de la lune, ainsi que le transfert d'Hohmann.  Le transfert d'Hohmann consiste, aprčs une premičre phase de montée avec le réacteur dans laquelle le LEM acquiert une vitesse horizontale qui est un peu supérieure ŕ a vitesse nécessaire pour orbiter la lune, ŕ laisser la vitesse horizontale lentement tirer le LEM plus loin de la lune et plus prčs de l'orbite du module de commande avec le réacteur coupé (et donc ne consommant pas de carburant); ŕ un moment donné, la vitesse horizontale du LEM devient insuffisante pour que le LEM continue de s'éloigner de la lune; le LEM allume alors momentanément son réacteur pour acquérir une nouvelle vitesse horizontale qui lui permettra de continuer de s'éloigner de la lune; une fois cette nouvelle vitesse horizontale acquise, le LEM éteint ŕ nouveau son réacteur et continue avec son réacteur éteint (et ne consommant pas de carburant). Aisni, le transfert d'Hohmann permet au LEM de se rapprocher progressivement du module de commande dans une spirale autour de la lune avec une consommation minimale de carburant.  le LEM peut également avoir ŕ allumer momentanément le RCS (réacteurs latéraux) lorsque son plan orbital croise celui du module de commande, et que son plan orbital est différent de celui du module de commande, de maničre ŕ rejoindre le plan orbital du module de commande.  Cette animation montre comment le LEM se comporte lorsqu'il arrive sur l'orbite du module de commande. Le LEM réalise un demi-tour grâce ŕ une poussée de directions opposées sur les réacteurs latéraux verticaux; durant ce demi-tour, le module de commande reste derričre le LEM. Lorsque ce demi-tour est fini, le LEM donne maintenant une petite poussée sur les deux réacteurs latéraux verticaux, cette fois de męmes directions, de maničre ŕ diminuer légérement la vitesse horizontale et se rapprocher du module de commande; une poussée sur le réacteur horizontal latéral du bas permet de contrôler l'altitude du LEM et de s'assurer qu'il ne descend pas en dessous de l'orbite du module de commande. Ce demi-tour n'a pas besoin d'ętre rapide, il peut ętre lent, et il vaut mieux qu'il soit lent, car le LEM a un ordinateur lent qui ne pourrait pas contrôler une rotation rapide.  Maintenant, vous allez dire: "Mais, si le LEM tourne, la séquence de photos dans Apollo 14 dans laquelle on voit le module de commande tourner pourrait ętre normale, car, si le LEM tourne, depuis son point de vue, il verra le module de commande comme tournant!" En fait, non, cette séquence reste incorrecte, et nous allons voir pourquoi.  D'abord, au début du demi-tour, le LEM ne peut voir le module de commande, car celui-ci n'est pas dans son champ de vision.  En fait, il y avait une fenętre sur le module lunaire qui permettait de voir le module de commande lorsque le module lunaire faisait face frontalement au module de commande, que j'ai cerclée de rouge sur ce schéma, mais cette fenętre était seulement pour permettre aux astronautes de faire l'alignement avec le module de commande, et ne permettait pas de prendre des photos plein champ avec les appareils Hasselblad.  Et c'est également le cas ŕ la fin du demi-tour.  Cela veut dire que la photo ci-dessus (AS14-66-9344) est impossible; il n'y a pas moyen que les astronautes aient pu voir le module de commande depuis le LEM sous cet angle. Maintenant, lorsque le LEM est au milieu de son demi-tour, il y a une petite plage autour de laquelle les astronautes peuvent voir le module de commande depuis le LEM.    Les trois vues stéréoscopiques ci-dessus montrent comment le LEM voit le module de commande respectivement un peu avant le quart de tour, au moment du quart de tour, et un peu aprčs le quart de tour. Notez que, si le LEM tourne dans l'autre sens, les astronautes verront le module de commande de la męme maničre, car ils le verront sur leur gauche au lieu de le voir sur leur droite, et ce qu'ils prendront en photo sera en fait identique. Ce n'est pas du tout ce que nous voyons sur les photos d'Apollo 14; le module de commande a des positions fausses sur celles-ci. Finalement, ce couple de photos (AS14-66-9352 & AS14-66-9356) est faux:  Pourquoi? Parce que nous voyons le module de commande s'approcher du LEM avant que le LEM n'ait terminé son demi-tour; lorsque le LEM voit le module de commande de cette maničre, cela signifie qu'il a couramment fait un quart de tour seulement, et non le demi-tour complet. le module de commande devrait attendre que le LEM ait fini son demi-tour avant de s'en approcher.  A la maničre dont le module de commande s'approche du LEM sur les photos Apollo, cela veut dire qu'il essaierait de le joindre d'une mančre incorrecte, sur un flan du LEM qui ne peut pas communiquer avec le module de commande. La séquence de photos du module de commande dans Apollo 14 est donc définitivement incorrecte. J'ai supposé que cette séquence a été prise lors du voyage retour du LEM; si elle a été prise au départ du LEM, elle est encore plus fausse. Dans Apollo 15, nous avons une autre séquence de photos du module de commande s'approchant du LEM au retour de ce dernier depuis la lune:  Sur cette séquence, nous voyons le module de commande s'approchant progressivement du LEM...et soudain, au lieu de s'arrimer au module de commande, le LEM passe au-dessus du module de commande et commence ŕ voler au-dessus, gaspillant ainsi le carburant dont il pourrait ętre ŕ court au moment oů il tentera de s'arrimer au module de commande!  Lorsque le LEM est proche du module de commande, il devrait ętre horizontal; le seul moment oů il fait une rotation est quand il fait sa manoeuvre de retourment (pour présenter son nez au module de commande), mais cette rotation se fait autour de l'axehorizontal. Sur ces photos d'Apollo 16, le LEM (pris depuis le module de commande) est en position verticale et tourne autour de l'axevertical! UNE FOIS DE PLUS, EST-CE QUE CELA A UN SENS, FRANCHEMENT, EST-CE QUE CELA A UN SENS???  Pour conclure, ces séquences de photos sont une vraie rigolade. Lorsque je vois ces photos, j'éprouve une grande difficulté ŕ prendre ces missions au sérieux. |
 La maneuvre de sortie d'orbite, qui faisait s'écraser sur la lune l'étage de descente, était faite en orientant le module lunaire dans la direction de la trajectoire de descente, en utilisant le RCS (moteurs latéraux), et ensuite en poussant avec son moteur principal le long de cette direction pour décroître la vitesse du module lunaire de maničre ŕ ce qu'il commence ŕ prendre cette trajectoire de descente; aprčs que le module lunaire ait coupé son moteur, le module lunaire doit continuer ŕ suivre la trajectoire qu'il a suivie pendant la maneuvre de sortie d'orbite. Cela signifie que la direction de la trajectoire entre la coupure du moteur et l'impact de l'étage de descente devrait ętre la męme que celle entre l'allumage du moteur et sa coupure. Selon le rapport de mission d'Apollo 17, la latitude de l'allumage du moteur est de 0,24° Sud, et la latitude de la coupure du moteur est de 2,02° Nord; la différence est de 2,26° (les latitudes doivent ętre ajoutées, et non soustraites, car l'une est Nord, et l'autre est Sud). La longitude de l'allumage du moteur est de 86,97° Est, et la longitude de la coupure du moteur est de 81,68° Est, et la différence de longitude est de 5,29° (cette fois, elles doivent effectivement ętre soustraites, car elles sont Est toutes deux). La rapport entre la différence de latitude et la différence de longitude est 2,26/5,29=0,427; elle correspond ŕ un angle de 23,13° relativement au plan orbital de la lune (obtenu par l'arc tangente de ce rapport). Nous devrions normalement trouver le męme rapport entre la différence de latitude entre la coupure du moteur et le point d'impact et la différence de longitude entre la coupure du moteur et le point d'impact, si le module lunaire a continué de suivre la trajectoire de descente.  Le rapport de mission d'Apollo 17 donne également les coordonnées du point d'impact de l'étage de descente. Ses coordonnées sont 19°, 57 minutes, et 58 secondes latitude Nord, et 30°, 29 minutes, and 23 secondes longitude Est. Ceci correspond ŕ une latitude de 19.96611° Nord et 30,48972° Est (la partie fractionnaire est obtenue en multipliant les minutes par 60, en ajoutant les secondes, et en divisant le résultat par 3600). La différence de latitude entre le point d'impact et la coupure du moteur de maneuvre de sortie d'orbite est 19,96611-2,02=17,94611°, et la différence de longitude entre le point d'impact et la coupure du moteur de sortie d'orbite est 81,68-30,48972=51,19028°. Le rapport entre cette différence de latitude et cette différence de longitude est de 17,94611/51,19028=0,35058; donc un rapport qui est assez différent du précédent, et qui correspond ŕ un angle de 19,32° relativement au plan équatorial de la lune.  Cela signifie donc que, aprčs la coupure du moteur dans la maneuvre de sortie d'orbite, au lieu de continuer ŕ suivre la trajectoire de descente qui a été déterminée par la maneuvre de sortie d'orbite (ligne verte), le module lunaire aurait fait un changement de direction d'environ 4° (ligne rouge), sans qu'une nouvelle maneuvre n'ait été faite avec les moteurs, ce qui est physiquement impossible! Si le module lunaire avait continué de suivre la trajectoire de descente normale, comme il l'aurait du, il se serait écrasé plus loin du site d'alunissage, plus au nord. Et il y a une autre surprise. Le rapport de mission d'Apollo 17 établit aussi que le point d'impact de l'étage de descente était ŕ environ 9,9 kilomčtres du site d'alunissage; s'ils donnent un chiffre décimal, cela signifie que la distance est précise ŕ 100 mčtres au moins.  Mais nous connaissons aussi les coordonnées du site d'alunissage d'Apollo 17.  Et, si nous rentrons les coordonnées du point d'impact et celles du site d'alunissage d'Apollo 17 dans le calculateur de distance lunaire, nous trouvons une distance de 10,54 kilomčtres; 640 mčtres de différence avec la distance indiquée dans le rapport de mission, alors que cette différence n'aurait logiquement pas dű excčder 100 mčtres! |