L'ETRANGE DESCENTE D'APOLLO 17
 Ils disent: "Le moteur de descente tourne d'abord ŗ 10% de sa poussťe pendant 26 secondes pour donner ŗ l'ordinateur le temps de repťrer le centre de masse du module lunaire. Il sera ensuite mis ŗ la poussťe maximale." 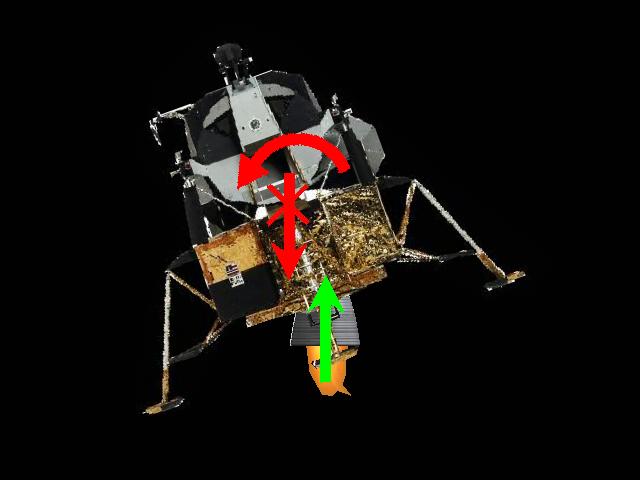 Il est important que la ligne de poussťe soit alignťe avec le centre de masse, sinon un torque de dťsalignement serait crťť, lequel ferait tourner le module lunaire.  Le moteur de descente pouvait Ítre pivotť, ce qui permettait d'aligner sa poussťe avec le centre de masse, de sorte ŗ ťviter le torque de dťsalignement, et ainsi ťviter la rotation du module lunaire. Lorsque les rťservoirs de carburant se vident, cela gťnťre un dťcalage du centre de masse qui ferait que le centre de masse ne serait plus alignť avec la poussťe du moteur, si le moteur n'ťtait pas pivotť pour rťaligner sa poussťe avec le centre de masse. Mais, au dťbut de la descente motorisťe, les rťservoirs ťtaient encore pleins, et donc la poussťe du rťacteur ťtait encore alignťe avec le centre de masse, et donc ce rťglage ťtait inutile. Il ťtait seulement utile aprŤs que les rťservoirs se soient vidťs, et que le centre de masse se soit dťplacť, mais il ne refont pas l'alignement plus tard quoique que cela aurait ťtť utile de le refaire alors. |
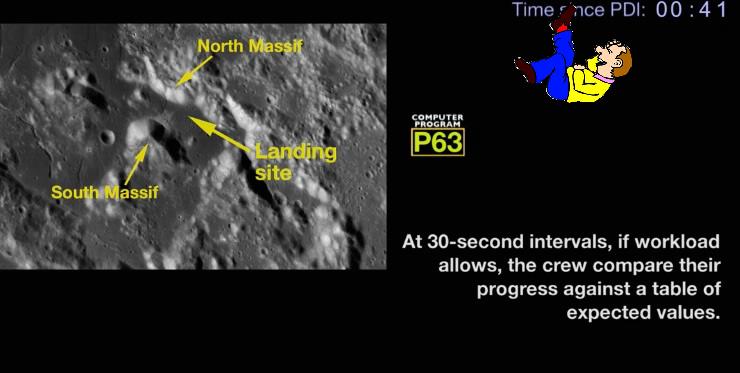 Ils disent: "A intervalles de 30 secondes, si leur charge de travail le permet, l'ťquipage compare leur progression avec une table de valeurs attendues". Oh vraiment, charge de travail? Quelle charge de travail , l'ordinateur fait tout le boulot. Faire cette comparaison signifiait la lecture de tous les paramŤtres de vol; mais cela prenait du temps, car ils ne pouvaient pas les lire tous en mÍme temps, l'affichage ťtant trop limitť. Cela signifie qu'il ne lisaient pas les diffťrentes valeurs en mÍme temps, et donc lisaient des valeurs qui n'ťtaient pas synchronisťes entre elles. Les comparer avec une table de valeurs attendues n'avait donc pas de sens. |
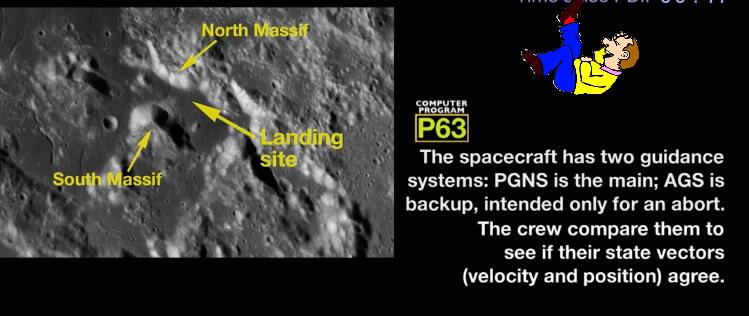 Ils disent: "Le vaisseau spatial avait deux systŤmes de guidage: PGNS est le principal, et AGS ťtait le systŤme de backup, seulement prťvu pour la procťdure d'abort. L'ťquipage les compare pour voir si leurs vecteurs d'ťtat (vťlocitťs et positions) concordent". Les deux systŤmes maintiennent leurs vecteurs d'ťtat ŗ partir des mÍmes donnťes et ťquations, et leurs vecteurs d'ťtat devraient donc Ítre les mÍmes. Maintenant les comparer n'a pas de sens, car cela prend du temps de lire les vecteurs d'ťtat sur chacun des ordinateurs (ŗ cause de la limitation des affichages), et le rťsultat est que les vecteurs d'ťtat, qui changent constamment, ne se correspondront pas l'un avec l'autre. Cela n'aurait pu avoir un sens que s'ils pouvaient instantanťment acquťrir les vecteurs d'ťtat comme un tout sur chacun des ordinateurs, mais cette facilitť n'ťtait pas disponible. |
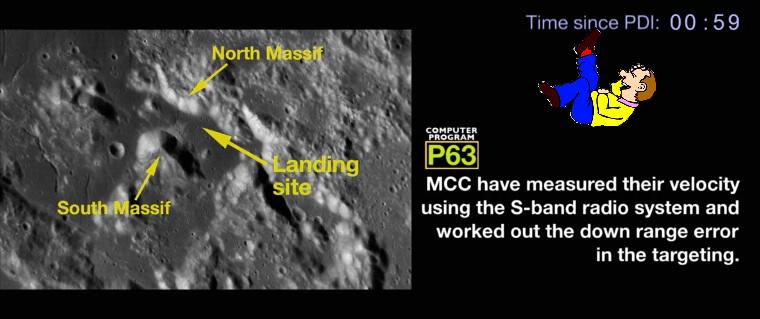 Ils disent: "MCC a mesurť leur vťlocitť en utilisant le systŤme de radio S-Band et ťvaluť l'erreur de portťe dans le guidage". La vťlocitť mesurťe avec des signaux radar insťrťs dans la transmission donne seulement un rťsultat grossier. Mais MCC n'a pas besoin de mesurer la vťlocitť de cette maniŤre, car elle est parfaitement connue, comme le module lunaire part avec la vitesse orbitale de l'orbite de dťpart qui est parfaitement connue, et avec une vitesse verticale nulle (puisque la vitesse orbitale gťnťre une force centrifuge qui compense exactement l'attraction lunaire). Alors pourquoi mesurer la vťlocitť pour obtenir un rťsultat imprťcis alors que la vťlocitť est en fait dťjŗ parfaitement connue avec prťcision? |
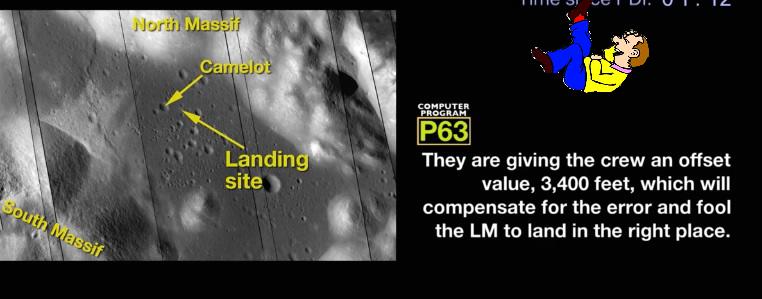 Ils disent: "Ils donnent ŗ l'ťquipage une valeur de dťcalage de 3400 pieds qui compensera pour l'erreur, et fera alunir le module lunaire ŗ l'endroit correct." Au lieu d'utiliser une vťlocitť parfaitement connue, le sol prťfŤre utiliser une vťlocitť grossiŤrement mesurťe. Comme il y a une diffťrence entre la vťlocitť thťorique et la vťlocitť grossiŤrement mesurťe, le sol donne ŗ l'ťquipage une correction correspondant ŗ cette diffťrence. Mais, comme l'erreur ne vient pas de la vťlocitť thťorique, mais de la vťlocitť mesurťe qui est imprťcise, si l'ťquipage applique la correction indiquťe par le sol, ils introduiront dans le guidage une erreur qui n'existait pas au lieu de corriger une erreur existante. Ceci est bien sŻr une blague de la part des ingťnieurs. |
 Ils disent: "H-dot reprťsente leur vitesse verticale ou leur taux de descente." Non, H-dot ne reprťsente pas une vitesse verticale mais une position horizontale, ce qui est complŤtement diffťrent. |
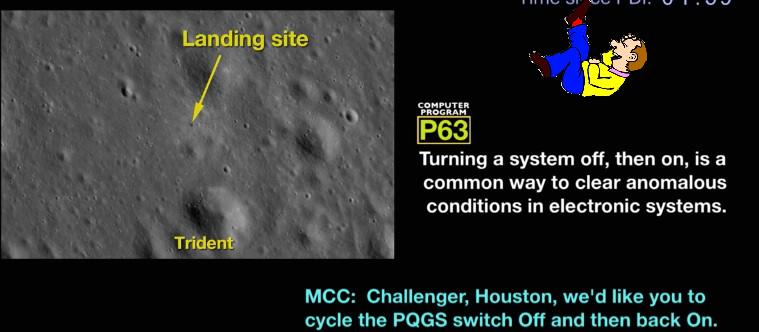 Ils disent: "Le fait d'ťteindre un systŤme et de le rallumer est un moyen commun d'enlever des conditions anormales dans un systŤme ťlectronique." C'est bien sŻr complŤtement ridicule; par exemple, si l'ordinateur ťtait ťteint et rallumť, il perdrait ses donnťes courantes dont il a besoin pour calculer les suivantes. |
 Ils disent: "Un des nombres de position dans l'AGS indique de combien ils se sont dťcalťs ŗ droite ou ŗ gauche de leur trajectoire idťale". Le module lunaire suit naturellement sa trajectoire, il n'a pas de raison de s'en ťcarter sur la gauche ou la droite, le guidage (utilisant des gyroscopes) fait continuellement des corrections pour rester sur la bonne trajectoire. L'AGS n'a pas de moyen de savoir de combien le module lunaire dťvie de sa trajectoire, car le guidage compense continuellement la dťviation. Ce serait stupide de penser que l'AGS saurait de combien le lem s'est ťcartť de sa trajectoire, et que le guidage ne ferait rien pour corriger cette dťrive. Et la trajectoire idťale est celle qui amŤne le module lunaire prŤs de la surface lunaire avec des vitesses horizontale et verticale faibles; elle n'implique pas une direction spťcifique. Cela doit ŗ nouveau Ítre vu comme une blague. |
 Ils disent: "la boule est le FDAI. Elle affiche leur attitude en faisant tourner une boule et elle devrait montrer un angle de tangage de 82 degrťs." 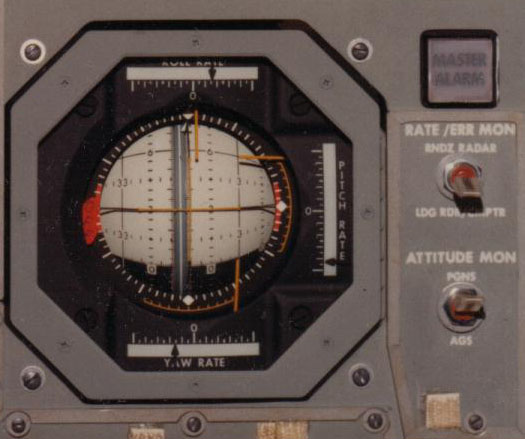 C'est vrai, le FDAI permet d'afficher les angles de roulis et de tangage. Mais il est graduť de 5 degrťs en 5 degrťs, ce qui signifie qu'il pourrait indiquer une valeur de tangage comprise entre 80 et 85 degrťs, mais pas prťcisťment 82 degrťs. |
 Ils disent: "Alors que le moteur continue de brŻler, et que le LEM devient plus lťger, la force du g augmente sur l'ťquipage. Ils se sentent plus lourds." C'est complŤtement ridicule. La force du g n'augmente pas parce que le lem devient plus lťger, mais parce que, comme la vitesse horizontale dťcroÓt, il en est de mÍme pour la force centrifuge, ce qui signifie qu'elle compense moins l'attraction lunaire, et donc le lem devient plus sujet ŗ l'attraction lunaire. |
 Ils disent: "Schmitt vťrifie la tension sur les batteries qui alimentent les engins explosifs qui serviraient ŗ sťparer les ťtages dans une procťdure d'abort." Schmitt dit au sol que la tension des batteries est de 37,2 volts. 37,2 volts? Mais la tension normale est de 28 volts! Est-il sŻr d'avoir bien lu? 27,2 volts paraÓtrait une valeur plus normale. |
 Ils disent: "Avant le dťpart, le module lunaire avait ťtť tournť (autour de son axe longitudinal) de 70 degrťs pour amťliorer l'angle d'orientation de l'antenne haut gain vers la terre. A prťsent ils tourne de 20 degrťs vers la gauche de sorte que le radar d'alunissage puisse voir la surface lunaire." 1) Le lem n'a pas besoin de tourner pour permettre ŗ l'antenne de mieux voir la terre, car elle peut tourner d'elle mÍme. 2) A la maniŤre dont le radar d'alunissage est placť, tourner le lem autour de son axe longitudinal ne l'aide pas ŗ mieux voir la surface lunaire. Et le radar d'alunissage devrait Ítre conÁu pour Ítre capable de voir la surface lunaire tout au long de la descente sans que le lem ait ŗ changer son attitude pour lui permettre de voir la surface lunaire. |
 Ils disent: "Ils comparent la valeur du radar pour la hauteur avec celle de l'ordinateur. Cette diffťrence est connue comme le "Delta-H". Elle n'est pas trop importante. La donnťe du radar peut Ítre acceptťe par l'ordinateur." Ils rťpťtent ici le mÍme gag que dans la descente d'Apollo 11. Le Delta-H est la diffťrence entre la hauteur initiale et la hauteur courante. Le radar donne une valeur mesurťe pour ce Delta-H (diffťrence entre l'altitude initiale et l'altitude donnťe par le radar), et le guidage calcule une valeur estimťe pour ce Delta-H, et le Delta-H n'est pas la diffťrence entre ces deux valeurs. Et, mÍme en supposant que le Delta-H reprťsente effectivement la diffťrence entre la hauteur mesurťe par le radar et la hauteur calculťe par le guidage, pourquoi vťrifieraient-ils quelque chose qui est automatiquement mis ŗ jour par le guidage? Parce qu'ils craignent que l'ordinateur dťconne? Le problŤme est que, sur cet ordinateur primitif, ils ne peuvent obtenir toutes les valeurs du guidage en mÍme temps, mais sťpararťment une ŗ la fois (avec un programme pour chacune); cela signifie qu'ils vont comparer des valeurs qui ne sont pas synchrones entre elles, et donc leur diffťrence ne sera pas significative. |
 Ils disent: "La donnťe du radar va maintenant Ítre graduellement "incorporťe" dans les ťquations de guidage" Lorsque disponible, la donnťe du radar d'alunissage n'est pas "graduellement" incorporťe dans les ťquations de guidage, mais immťdiatement utilisťe pour faire les calculs. "Graduellement" ne signifie rien dans le guidage. |
 Ils disent: "Eventuellement le radar et l'ordinateur vont converger vers les mÍmes valeurs pour l'altitude et la vťlocitť". Le radar ne donne qu'une valeur d'altitude, et non une vťlocitť; l'ordinateur obtient une vťlocitť ŗ partir de l'altitude en la dťrivant; l'ordinateur n'a donc rien pour comparer sa vťlocitť calculťe avec. |
 Ils disent: "Delta-H compare le PGNS avec le radar d'alunissage. Alors que le Radar dťtecte des montagnes ŗ l'est du site, cela affecte le Delta-H, un bon signe que cela marche bien." C'est une bonne plaisanterie: Delta-H mesure une variation de distance verticale au sol lunaire, et les montagnes dťtectťes ne sont pas ŗ la verticale du module lunaire. |
 "Cernan tourne le lem (autour de son axe longitudinal) de 20 degrťs vers la droite de sorte qu'il fasse directement face au ciel lunaire". Juste avant de tourner, Cernan voyait la terre ŗ travers le hublot. Sur le site d'Apollo 17, la terre avait une ťlevation de 52į; cela signifie que, lorsque Cernan voyait la terre ŗ travers son hublot (et il a dit qu'il ne voyait qu'elle), la direction de l'avant du module faisait avec l'horizontale un angle proche de 50į. Puis il tourne le module de sorte que le hublot fasse face au ciel lunaire, et donc de sorte que la direction de l'avant du module fasse un angle de 90į avec l'horizontale; cela fait une diffťrence proche de 40į avec l'orientation prťcťdente, mais Cernan n'a du tourner le module que de la moitiť pour couvrir cette diffťrence! C'est la magie de madame la lune! |
 Ils disent: "Le moteur opŤre maintenant en portťe rťglable de sorte que l'ordinateur puisse diriger sa poussťe pour voler sur la trajectoire idťale". Le moteur ne pouvait pas Ítre ajustť en portťe, seulement en poussťe, et sa poussťe est automatiquement ajustťe par le guidage pour suivre la trajectoire calculťe. Cette phrase ne veut donc rien dire, et sort directement de l'esprit dťlirant des ingťnieurs. |
 Ils disent: "Des deux systŤmes indťpendants pour mesurer la quantitť de carburant restante, celui qui indique la valeur la plus basse est choisi pour Ítre surveillť." Un systŤme peut indiquer une valeur plus basse que l'autre ŗ un moment donnť, mais les choses peuvent s'inverser ultťrieurement, et cela peut ensuite Ítre l'autre qui indique la valeur la plus basse. Cela veut dire que les deux systŤmes devraient Ítre constamment surveillťs, et l'indication la plus basse des deux retenue ŗ chaque fois. Ils avaient dťjŗ jouť cette blague dans la descente d'Apollo 11. |
 Ils disent: "Schmitt va mettre ŗ jour l'AGS en lui passant les nombres des vecteurs d'ťtat du PGNS". L'AGS n'a normalement pas besoin d'Ítre mis jour avec les vecteurs d'ťtat du PGNS car il utilise les mÍmes ťquations et donnťes, et obtient donc les mÍmes vecteurs d'ťtat. Maintenant, mettre ŗ jour l'AGS ŗ partir du PGNS aurait pu avoir un sens si les vecteurs d'ťtat avaient pu Ítre instantanťment mis ŗ jour ŗ partir de ceux du PGNS. En effet, pour faire la mise ŗ jour, Schmitt dit d'abord lire les 6 valeurs des vecteurs d'ťtat sur le PGNS, et ensuite les taper sur l'AGS, mais ceci prend du temps, et, d'ici que Schmitt ait fini de rentrer les vecteurs d'ťtat dans l'AGS, ils auront dťjŗ changť sur le PGNS, ce qui veut dire que Schmitt aura en fait mis ŗ jour l'AGS avec de mauvais vecteurs d'ťtat, non synchronisťs avec ceux du PGNS; ceci est d'autant plus absurde que, avant de faire la mise ŗ jour, les vecteurs d'ťtat ťtaient sans doute corrects sur l'AGS. Il est ťvident que, s'il avait ťtť nťcessaire de mettre ŗ jour les vecteurs d'ťtat sur l'AGS ŗ partir du PGNS, les ingťnieurs auraient mis en place un systŤme pour faire un transfert direct entre les deux ordinateurs, sans nťcessiter l'intervention d'un astronaute (de plus l'astronaute pouvait faire une erreur de frappe). |
 Ils disent: "Schmitt rentre manuellement l'information d'altitude depuis le radar dans l'AGS". C'est le mÍme gag que le prťcťdent. L'information d'altitude devrait Ítre directement rentrťe dans l'AGS, Schmitt ne devrait pas avoir ŗ la rentrer lui-mÍme, car, d'ici ŗ ce qu'il ait fini de la rentrer, elle aura dťjŗ changť. |
 Ils disent: "DŤs que le programme 64 commence, le module lunaire va se pencher en avant pour permettre d'avoir une meilleure visibilitť du site d'alunissage".  Et: "Challenger reprend une attitude plus verticale alors que le programme 64 commence la phase d'approche de la descente".  Le module lunaire ne devrait dťfinitivement pas se pencher juste pour permettre de voir la surface lunaire. Si les astronautes ont besoin de voir la surface lunaire, ils devraient Ítre ťquipťs avec un systŤme optique leur permettant de la voir. En effet, lorsque le module a perdu la plus grande partie de sa vitesse horizontale, la force centrifuge n'est plus lŗ pour contrer l'attraction lunaire, ce qui signifie que le lem doit conserver une attitude verticale de sorte ŗ pouvoir contrer l'attraction lunaire avec son moteur. Si le lem volait horizontalement, la lune l'attirerait, et il s'ťcraserait sur la lune.  Certains pourraient dire: le lem n'a pas besoin de voler complŤtement horizontalement, il pourrait voler de biais de sorte qu'une partie de sa poussťe puisse contrer l'attraction lunaire. Oui, mais dans ce cas la partie horizontale de la poussťe ferait rapidement gagner une importante vitesse horizontale au lem, et ce n'est pas souhaitable.  Si le lem faisait la maneuvre que nous voyons dans cette partie de la vidťo, il ne pourrait pas rester aussi stable, nous le verrions cahoter et gagner de la vitesse horizontale. Ce que nous voyons est complŤtement irrťaliste. |
 Ils disent: "L'ordinateur peut maintenant indiquer ŗ Cernan oý ils les emmŤne sur la surface lunaire. Ceci est le LPD (Landing point designator)"  Et: "Schmitt lit des angles sur l'ordinateur qui disent oý regarder sur les lignes gravťes sur la fenÍtre. Ceci est le point visť par l'ordinateur."  Et: "Cernan redťfinit le point d'alunissage ŗ l'ordinateur en tournant temporairement sur la gauche." Ceci requiert une explication. |
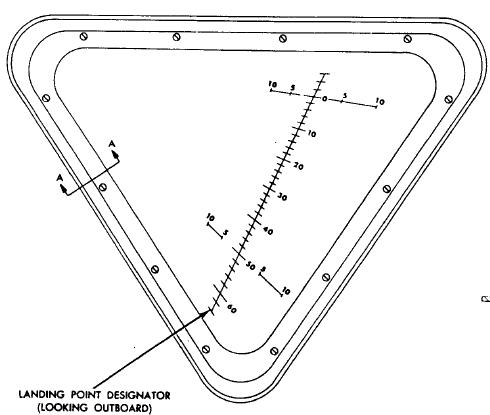 De maniŤre que les astronautes soient capables de dire ŗ l'ordinateur oý exactement poser le module lunaire, ils utilisaient un systŤme appelť "landing point designator", utilisant une ťchelle graduťe imprimťe sur la fenÍtre. 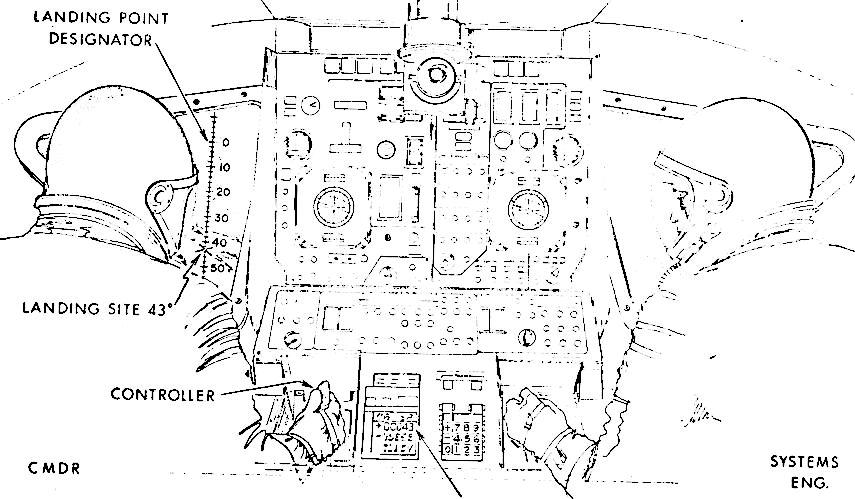 Un astronaute lisait sur l'affichage de l'astronaute sur quelle graduation de l'ťchelle l'ordinateur voyait le point d'alunissage, et l'annonÁait ŗ l'astronaute qui regardait par la fenÍtre. Le second astronaute regardait sur l'ťchelle sur quelle graduation il voyait le point d'alunissage dťsirť, et puis faisait sur une manette autant d'actions que la diffťrence entre la graduation de l'ordinateur et la sienne, de maniŤre ŗ dire ŗ l'ordinateur comment corriger sa trajectoire pour atteindre le point d'alunissage dťsirť.  Mais ce systŤme ťtait absurde, car il accumulait les dťlais. D'ici ŗ ce que Cernan ait fini ses actions sur la manette, son point d'alunissage dťsirť avait dťjŗ changť de graduation, et le point d'alunissage de l'ordinateur ťtait aussi dťjŗ sur une autre graduation que celle annoncťe par Schmitt. Il est tout ŗ fait ťvident que ce systŤme n'avait aucune chance de fonctionner, et que le module ťtait presque sŻr de manquer le point d'alunissage dťsirť. |
 Donc, est-ce qu'il y avait un meilleur systŤme pour dťsigner le point d'alunissage dťsirť? Bien sŻr il y en avait un; Cernan aurait du regarder ŗ travers un systŤme optique et aligner un rťticule sur le point d'alunissage dťsirť, et alors pousser sur un bouton pour dire ŗ l'ordinateur que le rťticule ťtait sur le point d'alunissage dťsirť, et l'ordinateur aurait immťdiatement connu l'endroit du point d'alunissage dťsirť. Mais comment l'ordinateur aurait-il pu savoir comment Cernan manipulait le systŤme optique?  TrŤs simplement, parce que le systŤme optique aurait fait tourner deux roues disposťes perpendiculairement, et qui auraient chacune envoyť des impulsions qu'un systŤme ťlectronique aurait pu compter ou dťcompter pour mettre ŗ jour la position dans chaque direction. 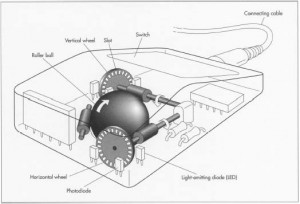 C'est d'ailleurs la maniŤre dont une souris mťcanique fonctionne; au fur et ŗ mesure que vous dťplacez la souris, une boule sphťrique tourne, laquelle fait tourner deux roues disposťes perpendiculairement, lesquelles envoient chacune des impulsions ŗ une circuiterie ťlectronique alors qu'elles tournent, et qui sont comptťes ou dťcomptťes pour mettre ŗ jour la position dans les deux directions alors que la souris bouge. Et si vous demandez si cette technologie existait au temps d'Apollo, oui, elle existait, car c'est une technologie relativement simple, qui ťtait disponible et utilisťe en ce temps. Cela signifie que les ingťnieurs auraient parfaitement pu concevoir un systŤme rationnel qui aurait pu donner de bons rťsultats au lieu de ce systŤme complŤtement irrationnel qui avait toute chance de mal marcher. |
 Imaginez si, au lieu que le curseur de votre souris se dťplace en mÍme temps que les dťplacements de votre souris...  ...Vous ayez ŗ cliquer la souris autant de fois que la distance entre la position courante et la nouvelle position dťsirťe pour y dťplacer le curseur souris...  ..Vous finiriez probablement par jeter votre ordinateur par la fenÍtre! Et dans le dťsignateur de point d'alunissage d'Apollo, c'ťtait encore pire, car Cernan ne voyait pas directement la position du point d'alunissage sur l'ťchelle graduťe, mais Schmitt devait la lui dire aprŤs l'avoir lue sur l'ťcran de l'ordinateur! Une preuve de plus que les ingťnieurs n'avaient pas l'intention de concevoir un systŤme rationnel pour un module lunaire dont il savaient parfaitement qu'il ne se poserait jamais sur la lune. |
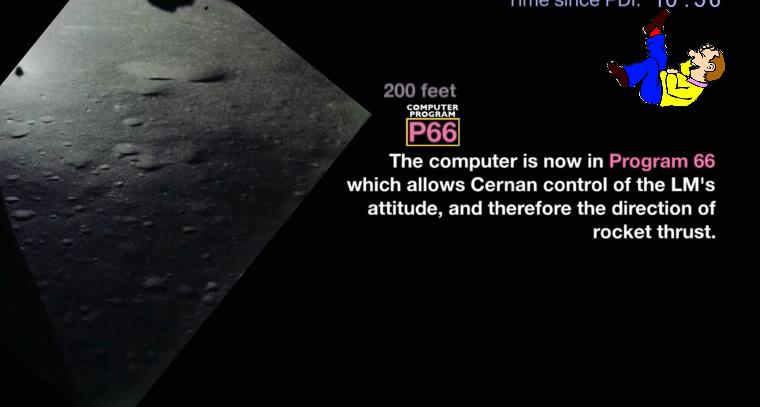 Ils disent: "L'ordinateur est maintenant dans le programme 66 qui permet ŗ Cernan de contrŰler l'attitude du lem, et donc la direction de la poussťe du rťacteur."  Non, Cernan ne doit certainement pas changer la direction de la poussťe du rťacteur. Le rťacteur principal doit absolument rester vertical pour contrer l'attraction lunaire, et ce sont les rťacteurs horizontaux latťraux qui doivent Ítre utilisťs pour dťplacer latťralement le module lunaire.  Il n'est absolument pas conseillť de pencher le module lunaire pour dťplacer le module lunaire. la rotation du module lunaire n'est pas aisťe ŗ contrŰler, car la poussťe des rťacteurs latťraux ne peut pas Ítre ajustťe, et que leur contrŰle est assez lent. De plus le rťacteur principal donnerait une poussťe trop importante qui accroÓtrait de trop la vitesse horizontale.  Il est donc bien mieux de garder le lem vertical, et de seulement dťplacer le module lunaire avec les rťacteurs latťraux horizontaux, qui peuvent dťplacer le module lunaire dans toutes les directions. Mais, pour dťplacer le module lunaire dans une direction, les rťacteurs latťraux correspondants ne doivent pas Ítre mis ŗ feu de maniŤre permanente, car, comme il n'y a pas d'air sur la lune pour le freiner, la vitesse horizontale augmenterait constamment.  Donc, ils doivent seulement Ítre mis ŗ feu pendant le temps nťcessaire pour atteindre la vitesse dťsirťe, et puis ťteints. Inversement, pour arrÍter le module lunaire, les rťacteurs poussant dans la direction opposťe doivent Ítre mis ŗ feu juste le temps nťcessaire d'annuler la vitesse horizontale. |
 Ils disent: "Additionnellement, Cernan peut ajuster ŗ quelle vitesse ils descendent en agissant sur la manette de rťglage vers le bas ou vers le haut. Chaque appui change la vitesse d'un pied par seconde." Non, absolument pas, les astronautes ne doivent pas avoir le contrŰle de la vitesse de descente, c'est bien trop dangereux. En effet, ils sont maintenant proches de la surface lunaire, et, s'ils programmaient une vitesse de descente inappropriťe, ils seraient pratiquement sŻrs de s'ťcraser sur la lune. C'est ŗ l'ordinateur de contrŰler la vitesse de descente, car il peut mieux voir la surface lunaire avec son radar que les astronautes, et il peut automatiquement adapter la vitesse de descente ŗ la hauteur restante.  Mais, si le fait d'avoir une manette pour contrŰler la vitesse de descente n'a pas de sens, d'un autre cŰtť, en avoir une pour contrŰler la vitesse latťrale en a un. En effet, cela permetrait aux astronautes de dťplacer le module lunaire un peu vite lorsqu'ils voient leur point d'alunissage dťsirť ŗ quelque distance, et plus lentement lorsqu'ils s'en approchent. |
 Ils disent: "La poussiŤre soulevťe par l'ťchappement du rťacteur est bien moins importante que sur les autres sites." Mais ce n'est pas de la poussiŤre que nous voyons projetťe depuis le sol.  Comme dit dans une vidťo prťcťdente, ce sont manifestement des faisceaux lumineux. |
 Ils disent: "Des sondes d'une longueur de 1,5 mŤtre pendent sous trois des pieds du module. Lorsqu'une d'elles touche la surface, une lampe s'illumine dans la cabine. C'est une indication pour arrÍter le moteur."  Il y avait effectivement des sondes pendant sous les pieds du module lunaire qui dťtectaient le sol lunaire en peu avant que le module lunaire ne touche lui-mÍme le sol. A ce moment, le moteur devait Ítre coupť, car il aurait ťtť dangereux de le laisser fonctionner alors que le module lunaire reposait sur le sol, comme sa jupe ťtait assez proche du sol lunaire, et cela aurait pu endommager le module lunaire. 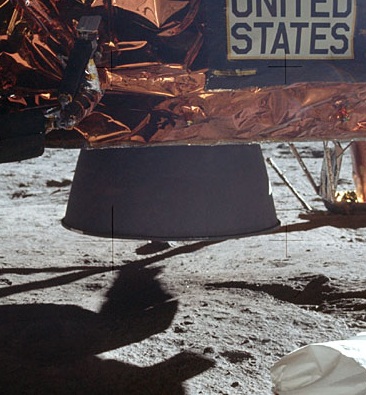 En effet, vous pouvez voir sur cette photo d'Apollo 11 que la jupe du rťacteur ťtait assez proche du sol lunaire lorsque le module reposait sur le sol, et cela pourrait mÍme Ítre pire, car il pourrait y avoir une bosse juste sous le rťacteur, rendant la jupe encore plus proche du sol, comme ils alunissaient sur un sol inconnu, qui pouvait ne pas Ítre plat. |
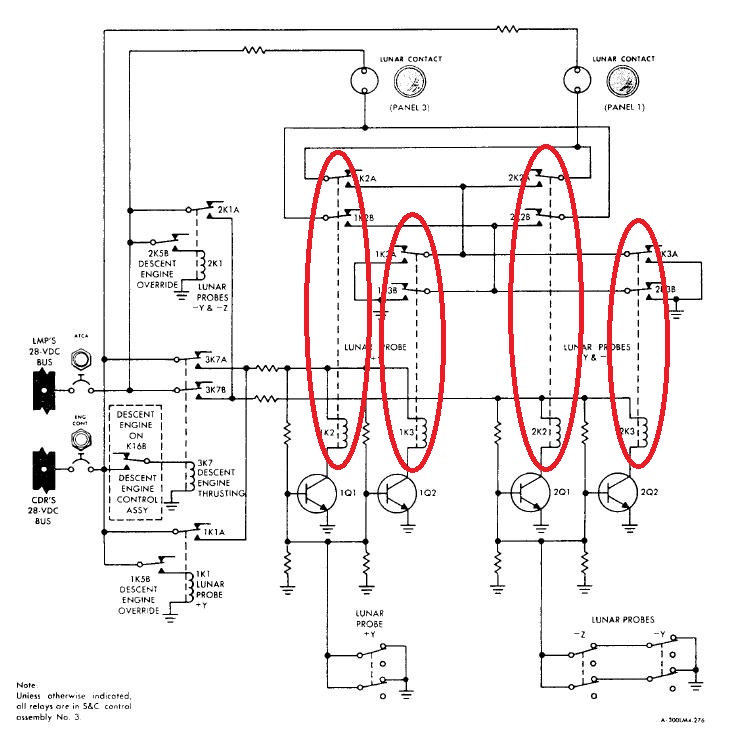 Mais, pour allumer les lampes avertissant les astronautes qu'ils devaient ťteindre le rťacteur, la circuiterie ťlectronique dťtectant les sondes utilisait des relais ťlectromťcaniques que j'ai cerclťs. La propriťtť d'un relais ťlectromťcanique est qu'il peut automatiquement fermer (ou ouvrir) un interrupteur lorsqu'il est activť. Cela signifie que cette circuiterie aurait pu directement couper le moteur sans avoir ŗ requťrir l'intervention des astronautes pour ce faire...Surtout que, pour juste allumer une lampe, il n'y a pas besoin d'un relais ťlectromťcanique, cela peut Ítre fait juste avec des transistors. Cela aurait ťtť plus sŻr de faire couper le moteur directement pas un relais ťlectromťcanique, car cela aurait ťvitť le temps de rťaction imprťvisible humain. |
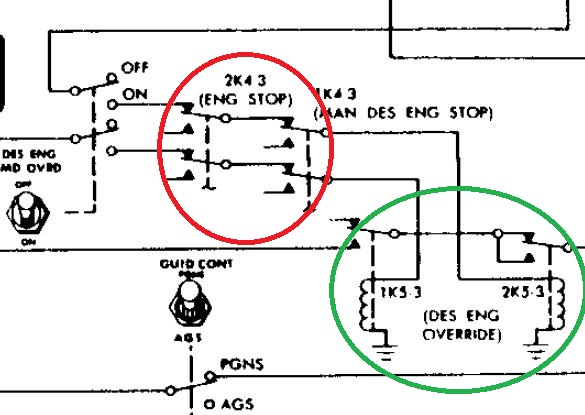 Et c'ťtait mÍme pire; car le bouton qu'ils devaient presser pour couper le moteur ne changeait pas directement un interrupteur pour couper le moteur, mais activait un relais ťlectromťcanique (cerclť de vert sur le schťma extrait de la documentation de la NASA) permettant de le couper; mais, au lieu de fermer un contact (cerclť de rouge sur le schťma) qui permettait d'envoyer un courant dans la bobine du relais ťlectromťcanique, le bouton, lorsque pressť, l'ouvrait ŗ la place, et c'est quand il ťtait rel‚chť, et refermait le contact, qu'il envoyait le courant dans la bobine du relais ťlectromťcanique, ce qui alors seulement coupait le moteur.  Cela signifie que le moteur n'ťtait pas pressť lorsqu'ils pressaient le bouton, mais aprŤs son rel‚chement complet.  Ceci ajoutait un nouveau dťlai pour couper le moteur. Et, dans l'excitation du moment, il ťtait possible qu'ils oublient de rel‚cher le bouton, et laissent le doigt sur le bouton d'arrÍt du moteur, avec la consťquence que le moteur serait encore ŗ feu lorsque le lem toucherait le sol, avec des consťquences qui pourraient Ítre catastrophiques. Mais il ťtait hors de question pour les ingťnieurs de la NASA de concevoir un systŤme normal sŻr pour un module lunaire qui n'alunirait jamais. |
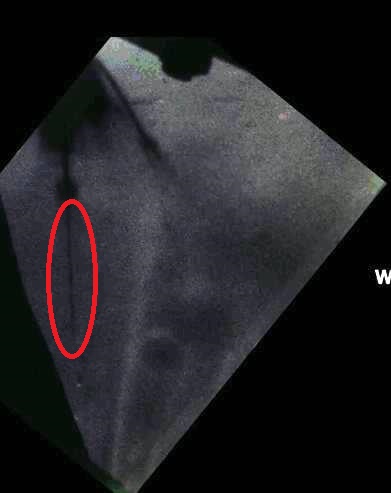 Observez l'ombre de la sonde lunaire que j'ai cerclťe sur cette image que j'ai extraite de la vidťo (et sur laquelle j'ai ajoutť un peu de luminositť, car elle ťtait un peu sombre). L'ombre de la sonde lunaire est anormalement longue et ťpaisse. 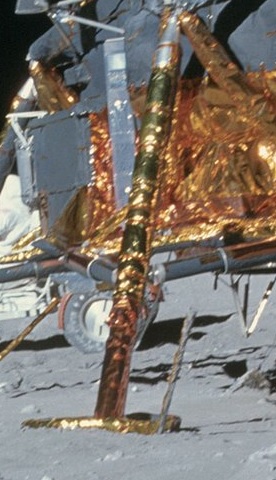 Pour vous donner une idťe, ce gros plan d'une photo d'Apollo 16 montre une patte du module lunaire avec une sonde lunaire ŗ son pied; voyez l'importante diffťrence entre les deux. Et cette anomalie ne peut Ítre expliquťe par le fait que la sonde lunaire serait plus proche du sol, car elle ne fait qu'un mŤtre et demie de long, et son ťpaisseur est constante sur l'image.  Et observez la sonde lunaire de l'autre patte visible sur cette image extraite de la vidťo (sur laquelle j'ai ajoutť un peu de luminositť pour la rendre plus visible). Elle est plus fine que la premiŤre, mais nous pouvons voir que sa direction n'est pas verticale, alors qu'elle devrait l'Ítre. |
 Puis observez la forme de l'ombre. 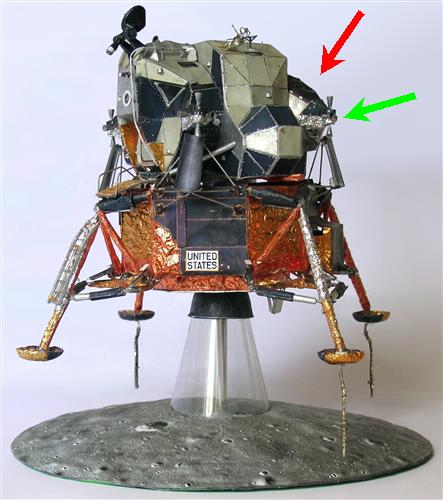 Le lem a aluni au lever du soleil, ce qui signifie que la lumiŤre du soleil avait une faible inclinaison, que j'ai reprťsentťe avec une flŤche verte (d'ailleurs on peut voir sur les photos de la mission que le lem a une ombre assez longue). Mais, ŗ la maniŤre dont on voit l'ombre sur la vidťo, il est manifeste qu'elle apparaÓt comme si la lumiŤre du soleil ťtait plus verticale, suivant une direction que j'ai reprťsentťe avec la flŤche rouge. |
 Et il y a une surprise finale sur l'ombre du lem aprŤs que le module lunaire se soit finalement posť.  Observez l'antenne S-Band sur l'ombre, que j'ai cerclťe de rouge. Vous pouvez clairement voir qu'elle est orientťe vers l'arriŤre du module lunaire.  Mais ce n'est pas ce que nous voyons sur les photos de la mission.  En effet...  Sur cette photo, l'antenne S-Band est orientťe de maniŤre complŤtement diffťrente, ce qui est d'ailleurs logique vu les positions relatives du soleil et de la terre (l'antenne S-Band doit toujours pointer vers la terre, puisqu'elle doit communiquer avec).  Nous avons donc un dťsaccord ici: L'antenne S-Band est orientťe vers l'arriŤre du lem sur l'ombre du lem juste aprŤs l'alunissage, mais elle est plus tard orientťe diffťremment! Nous avons affaire ŗ un nouveau tour de magie lunaire! |
 Mais, aprŤs tout, Dieu est lŗ pour veiller sur la mission, alors elle ne peut pas ťchouer! |

