SNOW CRUSHING ROBOT: SNOWBOT

Overview
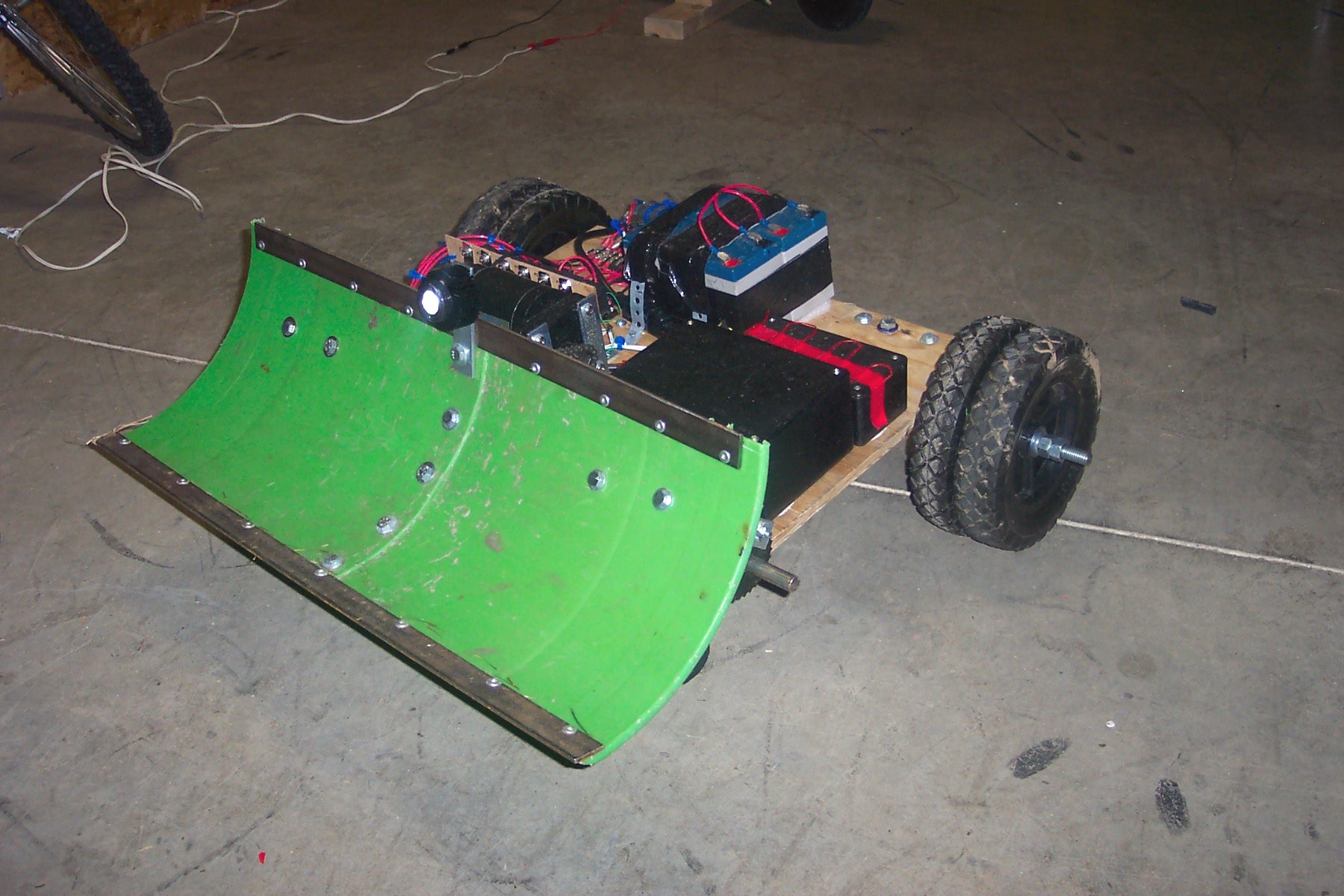
I never made no robots or mechanical projects before. Lots of people make robots so I figured it was worth a try. I bought a couple books through amazon.com on building battlebots to give me some ideas and more background on the RC part of the project. After a couple months, lots of $$ and several revisions, snowbot was ready to play in the snow. Snowbot is basically a mini-bulldozer. A RC controlled electric drive system with a scoop at the front which can be raised or lowered.Drive System
 Snowbot is rear-wheel drive; front wheels are rotatable caster wheels that enable turning. When I want
to turn left, the right wheel spins forward and the left wheel spins in reverse, the caster wheels go
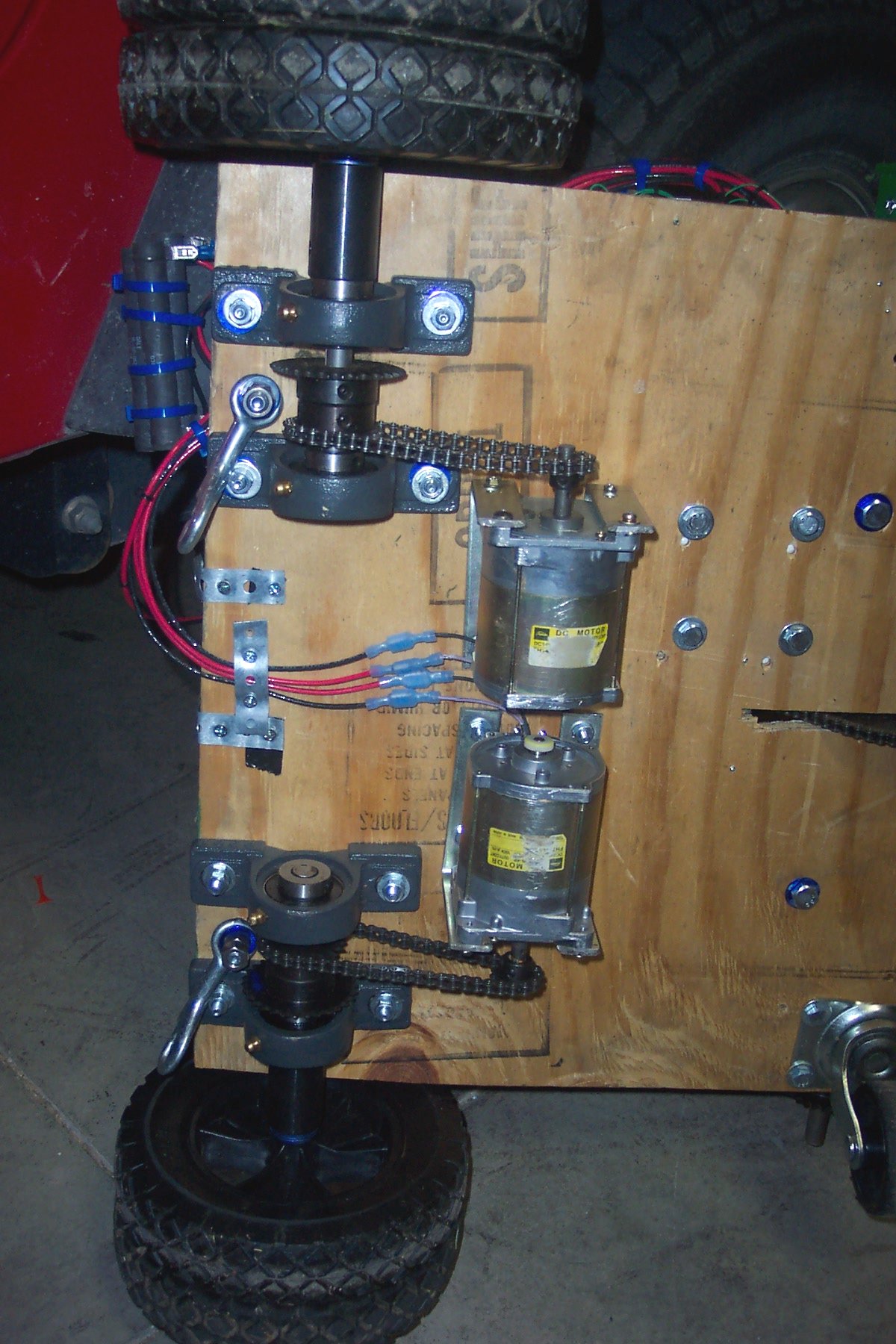
where ever they have to. The drive motors are 24VDC Toshiba gear-motors I purchased on ebay for $40/4. I only use
two for this project. These motors have 180 RPM output and are further geared down on the snowbot. These
motors drive roller-chain and 1/2" drive shafts supported by pillow-block bearings. These drive shafts are
coupled to 1/2" thread rod via a shaft coupling in order to secure the wheels to the shafts. I purchased
all the mechanical components (bearings, wheels, shafts, sprockets, chain) from a surplus place called the
Surplus Center. Photo of drive system here. In the snow the wheels just spin, so I made up a set of mini-tire chains. These make all the difference in snow, no problems slipping anymore!
Snowbot is rear-wheel drive; front wheels are rotatable caster wheels that enable turning. When I want
to turn left, the right wheel spins forward and the left wheel spins in reverse, the caster wheels go
where ever they have to. The drive motors are 24VDC Toshiba gear-motors I purchased on ebay for $40/4. I only use
two for this project. These motors have 180 RPM output and are further geared down on the snowbot. These
motors drive roller-chain and 1/2" drive shafts supported by pillow-block bearings. These drive shafts are
coupled to 1/2" thread rod via a shaft coupling in order to secure the wheels to the shafts. I purchased
all the mechanical components (bearings, wheels, shafts, sprockets, chain) from a surplus place called the
Surplus Center. Photo of drive system here. In the snow the wheels just spin, so I made up a set of mini-tire chains. These make all the difference in snow, no problems slipping anymore!
{kind=link}
Scoop System
I chose a 1/30 HP 24VDC 20 inch-lbs gear-motor from Surplus Center to drive the shovel mechanics. This motor has a 47 RPM output and is further geared down on the snowbot about 7:1 using a gigantic sprocket mounted on a 1/2" shaft in between two pillow block bearings. Also on the shaft are two sprockets with angle brackets fixed to them for the shovel attachment. The shovel itself used to be a 5 gallon bucket that I found in the woods while hunting. I cut off the bottom of the bucket and cut the remaining open cylinder into 3rd's. I fixed two of the thirds together with 1/4" bolts and riveted 1/8" thick steel stock to the top and bottom edges of the scoop to help resist breaking. With the torque ratings and gear ratio; this scoop should be able to lift about 35 lbs of snow. At the mechanical ends of travel for the scoop I installed limit switches to prevent the motor/scoop from breaking itself in the event of a control problem (which happened several times). Photo of scoop system here.Lighting
What snowplow would be complete without a nice bright floodlight mounted to the shovel for night-time fun? I'm using a 'extremely high bright power illuminator' consisting of 60 InGaN diode chips mounted on a TO-65 package with heat sink and wide angle lens. This thing is rated at 8W and 400 mA DC current. I got this from someone who's company was closing the doors and they were going to throw this out. This bad-boy is pretty bright, and makes things a lot easier to see at night! Spec sheet is here. Photo of lighting system here.Battery System
Snowbot's batteries are two 12VDC lead acid wired in series to provide 24VDC nominal. These batteries powered the electric bike and originally came from emergency lighting units I found in a construction dumpster. In order to charge these batteries I use a variable voltage DC power supply that I built from a VARIAC I got from Stanford Linear Accelerator Surplus. Photo of battery charging system here. There is no fancy charge controller circuit in there, I just set the voltage to say around 28 VDC and leave it to simmer overnight.Motor Power Control
The 'no-thrills' approach on the motor power control (and lack of $$) points toward relay control. Relay control is not proportional control so the Snowbot is pretty 'jerky'. I'm using 12VDC SPST relays from the Surplus Center. They are rated for 30AMPs and two are wired in series to make 24VDC DPST relays to control the motors. The overall motor control relay circuit is here. There is 100-Ohm; 100 W resistor (had them in junk box) in parallel with each motor to provide some breaking and prevent surge currents when the motor is quickly switched from driving forward to reverse. Photo of power relay control system here. With the braking resistors in there I have had no relay failures due to surge reverse currents.RC Control System
I had to spend some money on this part of the project. At first I was using a toy car RC unit and amplified the signals using a single transistor amp to drive relays. This was fine and basically what I am doing now but the range on the toy controller was horrible ~20 feet and 1 channel was burned out. So I upgraded and purchased a Hitech LASER6 RC unit with frequency on 75 MHz band for surface application. This controller is bad-ass with 5 channels of proportional control and 1 channel of digital. Since I'm not using proportional control system (or any commercial system) I had to do some modifications on the receiver end to integrate my relay control system. The standard receiver outputs a pulse length modulated signal. I have no way to convert this to anything I could drive a relay with so I used the standard hobby servo units to convert the pulse length signal to ~pulse width modulated. With pulse width modulation, I could construct a capacitor and resistor network to essentially convert the pulse width signal to a voltage modulated signal. With the voltage now proportional to the controller stick position, I picked a 'turn-on' voltage level by changing the values of series and shunt resistors to switch small 5VDC relays that would drive the 24VDC power relays for both directions on each of the 3 motors. So I ended up using 3 RC channels, 3 standard hobby servo motors (removed motors and processed data signals only) and circuit board with single transistor amplifiers and relays for 3 bi-directional RC channels. Overall control circuit is here. Photo of control system circuit board here. If I were to do this again I would try to pony up the cash for some proportional controllers. Not because I really need proportional but because they are already build and save a bunch of time/problems.Snowbot Performance
Snowbot is no limp weenie. Although difficult to control in a straight line, you can certainly scoop some snow with it. The tire chains are 1000% better traction than before but took some work to make. Range is excellent; I drive this thing up the street and scoop a track down the banker's drive across the street. Headlight is imperative in determining what direction it is facing at night. Overall it works quite well and is quite possibly the most purposeful think i have ever built-must be something wrong with my brain lately.




DISCLAIMER
The author assumes no liability for any incidental, consequential or other liability from the use of this information. All risks and damages, incidental or otherwise arising from the use or misuse of the information contained herein are entirely the responsibility of the user, have a nice day!
Last updated: 12/28/07
Copyright 2007, Greg Miller
https://www.angelfire.com/80s/sixmhz/snowbot.html